Signalverarbeitung UE 5 z-Transformation - Signal Processing and ...
Signalverarbeitung UE 5 z-Transformation - Signal Processing and ...
Signalverarbeitung UE 5 z-Transformation - Signal Processing and ...

Erfolgreiche ePaper selbst erstellen
Machen Sie aus Ihren PDF Publikationen ein blätterbares Flipbook mit unserer einzigartigen Google optimierten e-Paper Software.
http://www.spsc.tugraz.at/courses/dspue/ 1<br />
<strong><strong>Signal</strong>verarbeitung</strong> <strong>UE</strong> 5<br />
z-<strong>Transformation</strong><br />
<strong>Signal</strong> <strong>Processing</strong> <strong>and</strong> Speech Communication Laboratory, Inffeldgasse 16c/EG<br />
Sommersemester 2013<br />
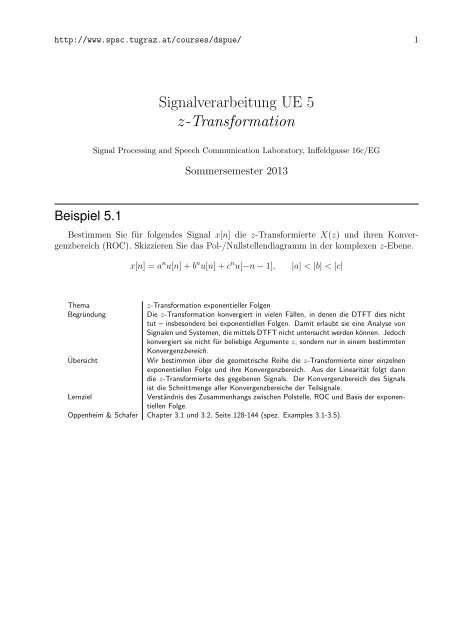
Beispiel 5.1<br />
Bestimmen Sie für folgendes <strong>Signal</strong> x[n] die z-Transformierte X(z) und ihren Konvergenzbereich<br />
(ROC). Skizzieren Sie das Pol-/Nullstellendiagramm in der komplexen z-Ebene.<br />
x[n] = a n u[n]+b n u[n]+c n u[−n−1],<br />
|a| < |b| < |c|<br />
Thema z-<strong>Transformation</strong> exponentieller Folgen<br />
Begründung Die z-<strong>Transformation</strong> konvergiert in vielen Fällen, in denen die DTFT dies nicht<br />
tut – insbesondere bei exponentiellen Folgen. Damit erlaubt sie eine Analyse von<br />
<strong>Signal</strong>enundSystemen, diemittelsDTFTnichtuntersuchtwerdenkönnen. Jedoch<br />
konvergiert sie nicht für beliebige Argumente z, sondern nur in einem bestimmten<br />
Konvergenzbereich.<br />
Übersicht Wir bestimmen über die geometrische Reihe die z-Transformierte einer einzelnen<br />
exponentiellen Folge und ihre Konvergenzbereich. Aus der Linearität folgt dann<br />
die z-Transformierte des gegebenen <strong>Signal</strong>s. Der Konvergenzbereich des <strong>Signal</strong>s<br />
ist die Schnittmenge aller Konvergenzbereiche der Teilsignale.<br />
Lernziel Verständnis des Zusammenhangs zwischen Polstelle, ROC und Basis der exponentiellen<br />
Folge.<br />
Oppenheim & Schafer Chapter 3.1 und 3.2, Seite 128-144 (spez. Examples 3.1-3.5).
http://www.spsc.tugraz.at/courses/dspue/ 2<br />
Beispiel 5.2<br />
Bestimmen Sie die inverse z-<strong>Transformation</strong> des folgenden Ausdrucks. Hinweis: Verwenden<br />
Sie die Partialbruchzerlegung.<br />
X(z) =<br />
3<br />
z − 1 − 1 x[n] ist absolut summierbar<br />
z−1,<br />
4 8<br />
Thema Inverse z-<strong>Transformation</strong><br />
Begründung Die inverse z-<strong>Transformation</strong> ist über ein komplexes Ringintegral definiert, das<br />
in einigen Fällen mittels Residuenkalkül lösbar ist. Es gibt oft jedoch einfachere<br />
Methoden, die inverse z-<strong>Transformation</strong> zu bestimmen, indem man sie geeignet<br />
zerlegt und die Formelsammlung einsetzt. Eine dieser geeigneten Zerlegungen ist<br />
die Partialbruchzerlegung (PBZ).<br />
Übersicht Für eine z-Transformierte mit einfachen Pol- und Nullstellen wenden wir die PBZ<br />
an, um sie in Terme zu zerlegen, die jeweils nur einen einzelnen Pol besitzen.<br />
Mit Beispiel 5.1 können wir diese Terme als exponentielle Folgen im Zeitbereich<br />
darstellen (unter Verwendung des Hinweises über Summierbarkeit. Aus der Linearität<br />
folgt das Ergebnis.<br />
Lernziel Inverse z-<strong>Transformation</strong> einer rationel Übertragungsfunktion, Üben der PBZ.<br />
Oppenheim & Schafer Chapter 3.3, Seite 144-153 (spez. Example 3.9).<br />
Beispiel 5.3<br />
Analysieren Sie das durch die folgende Differenzengleichung definierte LTI-System mittels<br />
der z-<strong>Transformation</strong>:<br />
y[n] = x[n]− 1<br />
15 y[n−1]+ 2 5 y[n−2].<br />
(a) Bestimmen Sie die Übertragungsfunktion H(z) = Y(z)/X(z).<br />
(b) Skizzieren Sie die Pol- und Nullstellen von H(z) in der komplexen z-Ebene und geben Sie<br />
den Konvergenzbereich an. Ist das System stabil?<br />
(c) Konvergiert die Fourier-Transformierte H(e jθ )? Zeichnen Sie qualitativ den Betragsfrequenzgang<br />
|H(e jθ )|.<br />
(d) Bestimmen Sie die Impulsantwort h[n] des Systems.<br />
Thema z-Übertragungsfunktion<br />
Begründung Die z-Transformierte der Impulsantwort eines System ist dessen<br />
Übertragungsfunktion, welche über die Differenzengleichung einfach bestimmt<br />
werden kann. Aus ihr lässt sich – mit etwas Zusatzwissen über Kausalität – die<br />
Stabilität und die DTFT des Systems ablesen. Sogar der Betragsfrequenzgang<br />
kann anh<strong>and</strong> der Übertragungsfunktion abgeschätzt weden.<br />
Übersicht FürdasgegebeneSystembestimmenwirdieÜbertragungsfunktionundderenROC,<br />
woraus sich die Stabilität ergibt. Die DTFT erhalten wir durch Auswertung von<br />
H(z) am Einheitskreis, den Betragsfrequenzgang aus dem sogenannten Gummihautmodell.<br />
Mit Beispiel 5.2 erhalten wir zudem die Impulsantwort des Systems.<br />
Lernziel Bestimmen der z-Transformierten aus der Differenzengleichung, Bestimmen des<br />
Betragsfrequenzgangs aus dem Pol-/Nullstellendiagramm.<br />
Oppenheim & Schafer Chapter 3.5, Seite 160-164 und Chapter 5.3, Seite 318-329 (spez. Example 5.6).
http://www.spsc.tugraz.at/courses/dspue/ 3<br />
Im{z}<br />
00000000000<br />
11111111111<br />
00000000000<br />
11111111111<br />
00000000000<br />
11111111111<br />
00000000000<br />
11111111111<br />
00000000000<br />
11111111111<br />
00000000000<br />
11111111111<br />
00000000000<br />
11111111111<br />
00000000000<br />
11111111111<br />
00000000000<br />
11111111111<br />
00000000000<br />
11111111111 a b<br />
00000000000<br />
11111111111<br />
00000000000<br />
11111111111<br />
00000000000<br />
11111111111<br />
00000000000<br />
11111111111<br />
00000000000<br />
11111111111<br />
00000000000<br />
11111111111<br />
00000000000<br />
11111111111<br />
00000000000<br />
11111111111<br />
00000000000<br />
11111111111<br />
00000000000<br />
11111111111<br />
00000000000<br />
11111111111<br />
00000000000<br />
11111111111<br />
ROC<br />
c<br />
Re{z}<br />
Possible zeros<br />
Possible zeros<br />
Figure 1: Pol-/Nullstellendiagramm und ROC für Beispiel 5.1<br />
output of >>zplane(roots([1 0 0]),roots([1 1/15 −2/5]))<br />
1<br />
0.8<br />
0.6<br />
0.4<br />
Imaginary Part<br />
0.2<br />
0<br />
−0.2<br />
−0.4<br />
−0.6<br />
−0.8<br />
−1<br />
2<br />
−1 −0.5 0 0.5 1<br />
Real Part<br />
Figure 2: Pol-/Nullstellendiagramm für Beispiel 5.3
http://www.spsc.tugraz.at/courses/dspue/ 4<br />
magnitude of the z−Transform<br />
2<br />
abs(H(z))<br />
7<br />
6<br />
5<br />
4<br />
3<br />
2<br />
1<br />
0<br />
2<br />
1.8<br />
1.6<br />
1.4<br />
1.2<br />
1<br />
0.8<br />
0.6<br />
0.4<br />
0<br />
Im(z)<br />
−2<br />
−2<br />
−1<br />
0<br />
Re(z)<br />
1<br />
2<br />
0.2<br />
0<br />
Figure 3: Betrag der z-Transformierten für Beispiel 5.3<br />
10<br />
output of >>freqz(1,[1 1/15 −2/5],’whole’)<br />
Magnitude (dB)<br />
5<br />
0<br />
−5<br />
0 0.5 1 1.5 2<br />
Normalized Frequency (×π rad/sample)<br />
40<br />
Phase (degrees)<br />
20<br />
0<br />
−20<br />
−40<br />
0 0.5 1 1.5 2<br />
Normalized Frequency (×π rad/sample)<br />
Figure 4: Frequenzgang H(e jθ ) für Beispiel 5.3