Grundlagen des Versuches ''Regelschaltungen'' Technische ...
Grundlagen des Versuches ''Regelschaltungen'' Technische ...
Grundlagen des Versuches ''Regelschaltungen'' Technische ...

Sie wollen auch ein ePaper? Erhöhen Sie die Reichweite Ihrer Titel.
YUMPU macht aus Druck-PDFs automatisch weboptimierte ePaper, die Google liebt.
<strong>Grundlagen</strong> <strong>des</strong> <strong>Versuches</strong> <strong>''Regelschaltungen''</strong><br />
<strong>Technische</strong> Systeme sollen häufig so beeinflusst werden, dass bestimmte zeitveränderliche<br />
Systemgrößen ein vorgeschriebenes Verhalten aufweisen. Zum Beispiel soll eine Größe unabhängig<br />
von Störeinflüssen, die auf das System einwirken, konstant gehalten werden. Diese Aufgabe kann<br />
von Regelschaltungen übernommen werden.<br />
Begriffsbildung<br />
Die zu regelnde Größe ist die Regelgröße (Temperatur <strong>des</strong> Kühlkörpers), das Ziel der<br />
Regelschaltung ist es sie an den möglicherweise zeitabhängigen Sollwert anzupassen. Dazu muss<br />
die Regelgröße zu einem bestimmten Zeitpunkt gemessen werden und dieser Istwert mit dem<br />
Sollwert verglichen werden. Ihre Differenz ist die Regelabweichung, sie dient zur Steuerung der<br />
Regelgröße und ist die Eingangsgröße der Regelschaltung. Sie wird gemäß der<br />
Übertragungsfunktion der verwendeten Regelschaltung in die Steuergröße übersetzt. Diese muss<br />
häufig auf einen Leistungsverstärker gegeben werden, um das Stellglied (Lüfter) antreiben zu<br />
können, <strong>des</strong>sen Ausgangssignal bezeichnet man dann als Stellgröße.<br />
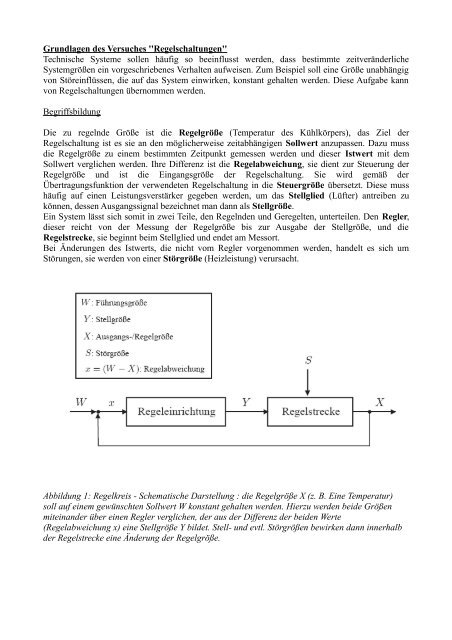
Ein System lässt sich somit in zwei Teile, den Regelnden und Geregelten, unterteilen. Den Regler,<br />
dieser reicht von der Messung der Regelgröße bis zur Ausgabe der Stellgröße, und die<br />
Regelstrecke, sie beginnt beim Stellglied und endet am Messort.<br />
Bei Änderungen <strong>des</strong> Istwerts, die nicht vom Regler vorgenommen werden, handelt es sich um<br />
Störungen, sie werden von einer Störgröße (Heizleistung) verursacht.<br />
Abbildung 1: Regelkreis - Schematische Darstellung : die Regelgröße X (z. B. Eine Temperatur)<br />
soll auf einem gewünschten Sollwert W konstant gehalten werden. Hierzu werden beide Größen<br />
miteinander über einen Regler verglichen, der aus der Differenz der beiden Werte<br />
(Regelabweichung x) eine Stellgröße Y bildet. Stell- und evtl. Störgrößen bewirken dann innerhalb<br />
der Regelstrecke eine Änderung der Regelgröße.
Arten von Reglern<br />
In diesem Versuch werden stetige Regler betrachtet, also Regler, welche eine von der<br />
Regeldifferenz x abhängende, stetig Ausgangsgröße bereitstellen.<br />
Regler lassen sich in stetige und unstetige Regler unterteilen. Bei stetigen Reglern kann die<br />
Ausgangsgröße (Stellgröße) kontinuierliche Werte annehmen, während sie bei unstetigen auf eine<br />
abzählbare Wertemenge beschränkt ist.<br />
Der einfachste Fall eines unstetigen Reglers ist der Zweipunktregler, seine Stellgröße kann nur zwei<br />
Werte, ein und aus, annehmen. Die Reglung muss folglich über die Einschaltdauer erfolgen.<br />
Stetige Regler können ihre Stellgröße zeitlich auf verschiedene Weise variieren, man unterscheidet<br />
zwischen proportional (P), integral (I) und differentiell (D) wirkenden Reglern.<br />
<br />
Der P-Regler generiert eine zur Regeldifferenz x:= ( W – X) proportionale Stellgröße:<br />
In vielen Fällen genügt die Regelung über einen P-Regler, da er einfach zu realisieren ist und<br />
schnell auf Regeldifferenz reargiert. Nachteilhaft ist jedoch, dass Regeldifferenzen über ihn nicht<br />
vollständig beisetigt werden können. Zudem kann die Wahl eines zu großen Einstellwertes für KP<br />
zur Systemstabilität führen.<br />
<br />
Der I-Regler, generiert eine Stellgröße, deren Änderungsgeschwindigkeit proportional zur<br />
Regeldifferenz ist:<br />
Über den Integralregler können Regelabweichungen eliminiert werden, da er so lange auf ein<br />
Eingangssignal reagiert, bis es zu Null geworden ist. Der Nachteil besteht darin, dass er relativ<br />
langsam reagiert und daher schnellen dynamischen Anforderungen nicht gerecht wird.<br />
<br />
Ein D-Regler erzeugt eine zur Änderungsgeschwindigkeit der Regeldifferenz proportionale
Stellgröße:<br />
Ein derartiges Regelement ist nur sinnvoll in Verbindung mit einem der andern Reglertypen, da es<br />
nicht auf konstante Regeldifferenzen reargiert, für x = const also Y = 0 ist. Es kompensiert jedoch<br />
zu schnelle Ausgleichsänderungen der anderen beiden Regelelemente und<br />
trägt somit zur Stabilisierung <strong>des</strong> Regelkreises bei.<br />
Diese Anteile können beliebig kombiniert werden, sodass sich im kompliziertesten Falle ein PID-<br />
Regler ergibt.<br />
Da die Stellgröße <strong>des</strong> P-Reglers stets proportional zur Regelabweichung ist, endet seine Regelung<br />
sobald der Sollwert erreicht ist. Beim Vorhandensein einer Störgröße führt dies zu einer neuerlichen<br />
Regelabweichung, zunächst so klein, dass der Regler der Störgröße nicht entgegenwirken kann.<br />
Dadurch verbleibt beim einfachen P-Regler immer eine Regelabweichung.<br />
Dies kann unteranderem durch das Hinzufügen eines integralen Anteils vermieden werden. Da die<br />
Regelabweichung ständig aufintegriert wird, kann die Störung überwunden werden. Andererseits<br />
sinkt der integrale Anteil beim Erreichen <strong>des</strong> Sollwerts nicht ab, weshalb es beim PI-Regler<br />
zunächst zum Überschwingen kommt.<br />
Bei einem PID-Regler wirkt zudem ein differentieller Anteil, dieser führt zu einer umso stärkeren<br />
Reglung je größer die Änderung der Regelabweichung ist. Dies kann zu einer Dämpfung der<br />
Schwingung, bei sich schnell ändernden Regelgrößen jedoch auch zu einer Instabilität führen.