EASY-ROB Dokumentation - physicstoDot
EASY-ROB Dokumentation - physicstoDot
EASY-ROB Dokumentation - physicstoDot

Erfolgreiche ePaper selbst erstellen
Machen Sie aus Ihren PDF Publikationen ein blätterbares Flipbook mit unserer einzigartigen Google optimierten e-Paper Software.
Z<br />
i-1<br />
Zi<br />
ϑ i<br />
ϕ i<br />
+ϕ i<br />
Z i-2<br />
Yi<br />
Xi<br />
Glied (i)<br />
Glied (i-1)<br />
d i<br />
+ϑ i<br />
Si<br />
X i-1<br />
i-1<br />
di-1<br />
Y<br />
Z<br />
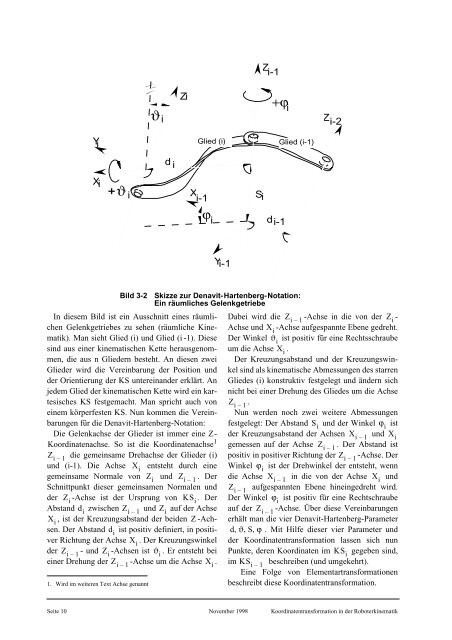
Bild 3-2 Skizze zur Denavit-Hartenberg-Notation:<br />
Ein räumliches Gelenkgetriebe<br />
In diesem Bild ist ein Ausschnitt eines räumlichen<br />
Dabei wird die – -Achse in die von der Z i -<br />
einer Drehung der Z i– 1 -Achse um die Achse X i . im KS i–<br />
1 beschreiben (und umgekehrt).<br />
Gelenkgetriebes zu sehen (räumliche Kine-<br />
Achse und X i -Achse aufgespannte Ebene gedreht.<br />
i 1<br />
matik). Man sieht Glied (i) und Glied (i -1). Diese Der Winkel ϑ iXi ist positiv für eine Rechtsschraube<br />
sind aus einer kinematischen Kette herausgenommen,<br />
um die Achse .<br />
die aus n Gliedern besteht. An diesen zwei<br />
Glieder wird die Vereinbarung der Position und<br />
der Orientierung der KS untereinander erklärt. An<br />
jedem Glied der kinematischen Kette wird ein kartesisches<br />
Der Kreuzungsabstand und der Kreuzungswinkel<br />
sind als kinematische Abmessungen des starren<br />
Gliedes (i) konstruktiv festgelegt und ändern sich<br />
nicht bei einer Drehung des Gliedes um die Achse<br />
KS festgemacht. Man spricht auch von Z i 1 .<br />
einem körperfesten KS. Nun kommen die Vereinbarungen<br />
–<br />
Nun werden noch zwei weitere Abmessungen<br />
für die Denavit-Hartenberg-Notation: festgelegt: Der Abstand S i und der Winkel ϕ i ist<br />
Die Gelenkachse der Glieder ist immer eine Z- der Kreuzungsabstand der Achsen X i– 1 und X i<br />
Koordinatenachse. So ist die Koordinatenachse 1 gemessen auf der Achse Z i 1 . Der Abstand ist<br />
Z i 1 die gemeinsame Drehachse der Glieder (i)<br />
–<br />
positiv in positiver Richtung der Z i–<br />
1 -Achse. Der<br />
–<br />
und (i-1). Die Achse X i entsteht durch eine Winkel ϕ i ist der Drehwinkel der entsteht, wenn<br />
gemeinsame Normale von Z i und Z i–<br />
1 . Der die Achse X i– 1 in die von der Achse X i und<br />
Schnittpunkt dieser gemeinsamen Normalen und Z i 1 aufgespannten Ebene hineingedreht wird.<br />
der Z i -Achse ist der Ursprung von KS i . Der<br />
–<br />
Der Winkel ϕ i ist positiv für eine Rechtschraube<br />
Abstand d i zwischen Z i– 1 und Z i auf der Achse auf der Z i–<br />
1 -Achse. Über diese Vereinbarungen<br />
X i , ist der Kreuzungsabstand der beiden Z -Achsen.<br />
erhält man die vier Denavit-Hartenberg-Parameter<br />
Der Abstand d i ist positiv definiert, in positi-<br />
d, ϑ, S,<br />
ϕ . Mit Hilfe dieser vier Parameter und<br />
ver Richtung der Achse X i . Der Kreuzungswinkel der Koordinatentransformation lassen sich nun<br />
der Z i– 1 - und Z i -Achsen ist ϑ i . Er entsteht bei Punkte, deren Koordinaten im KS i gegeben sind,<br />
Eine Folge von Elementartransformationen<br />
beschreibt diese Koordinatentransformation.<br />
1. Wird im weiteren Text Achse genannt<br />
Seite 10 November 1998 Koordinatentransformation in der Roboterkinematik