EASY-ROB Dokumentation - physicstoDot
EASY-ROB Dokumentation - physicstoDot
EASY-ROB Dokumentation - physicstoDot

Sie wollen auch ein ePaper? Erhöhen Sie die Reichweite Ihrer Titel.
YUMPU macht aus Druck-PDFs automatisch weboptimierte ePaper, die Google liebt.
negativen wechselt, oder die eingesetzten Sinusund<br />
Cosinusfunktionen andere Vorzeichen bekommen.<br />
Spätestens wenn man mit 6 Freiheitsgraden 1<br />
oder und mit einem redundanten System 2 arbeitet,<br />
muß man sehr viele Randbedingungen für die<br />
Winkelfunktionen zur Hand haben, um das erreichen<br />
des Punktes richtig zu beschreiben. Die Probleme<br />
weiten sich aus, wenn man für eine<br />
Bewegung zu einem Punkt eine Optimierungsstrategie<br />
(z.B. Verfahren auf kürzestem Weg oder mit<br />
geringstem Energieaufwand) einsetzen will.<br />
Außerdem ist diese Art der Berechnung für einen<br />
Computer nicht ausreichend für eine online<br />
Berechnung, da trotz seiner Schnelligkeit die<br />
Berechnung einer Winkelfunktion relativ viel Zeit<br />
in Anspruch nimmt [11].<br />
Man verliert auch schnell den Überblick wann<br />
welche Randbedingung für welche Stabstellung<br />
zählt, und wenn noch eine vorgegebene Orientierung<br />
eines Werkzeugs an einer Arbeitsbahn für ein<br />
Werkzeug am Roboter hinzukommt, d.h. es müssen<br />
6 Freiheitsgrade zur Verfügung stehen um<br />
einen Punkt zu erreichen, dann ist diese Berechnungsmethode<br />
zum Scheitern verurteilt [7] 3 .<br />
Aus diesen Gründen arbeitet <strong>EASY</strong>-<strong>ROB</strong> bei<br />
der Berechnung der Antriebsdaten mit Koordinatentransformationen<br />
und der Matrizenrechnung.<br />
Mit der Koordinatentransformation wird ein fester<br />
Berechnungsalgorithmus zur Bestimmung der<br />
Winkellagen eingesetzt und mit der Matrizenrechnung<br />
eine einfach programmierbare und für die<br />
Berechnungszeit optimale Berechnungsmethode<br />
eingesetzt.<br />
2.2 Koordinatensysteme und<br />
Koordinatentransformation<br />
[10] 4<br />
Ein Punkt im Raum kann in einem Koordinatensystem<br />
5 beschrieben werden. Zur Definition eines<br />
Koordinatensystems dienen die Einheitsvektoren<br />
e x , e y , e z . Wenn diese linear unabhängig sind,<br />
kann man sie von einem beliebigen gemeinsamen<br />
Ursprung ausgehend zur Darstellung eines beliebigen<br />
Punktes im Raum heranziehen.<br />
1. Position und Orientierung eines Werkzeugs im Raum<br />
2. Es gibt mehrere möglich Stellungen um den Punkt zu erreichen<br />
3. Kapitel 2.4 und 2.5<br />
4. Kapitel 6.1.1<br />
5. Wird im weiteren Text mit KS abgekürzt<br />
X<br />
ex<br />
Z<br />
ez<br />
y<br />
ey<br />
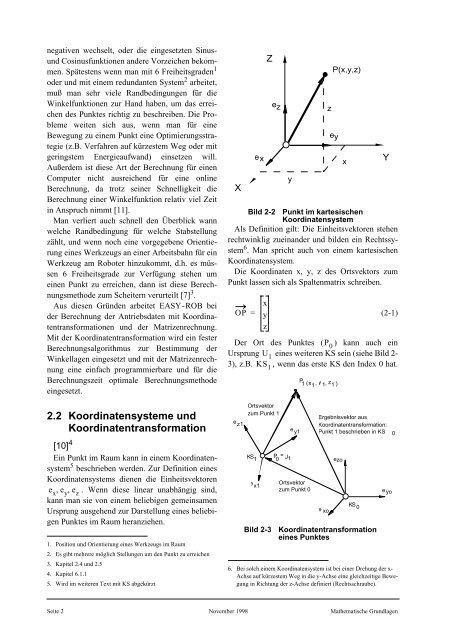
Bild 2-2 Punkt im kartesischen<br />
Koordinatensystem<br />
Als Definition gilt: Die Einheitsvektoren stehen<br />
rechtwinklig zueinander und bilden ein Rechtssystem<br />
6 . Man spricht auch von einem kartesischen<br />
Koordinatensystem.<br />
Die Koordinaten x, y, z des Ortsvektors zum<br />
Punkt lassen sich als Spaltenmatrix schreiben.<br />
OP<br />
=<br />
x<br />
y<br />
z<br />
(2-1)<br />
Der Ort des Punktes ( P 0 ) kann auch ein<br />
Ursprung U 1 eines weiteren KS sein (siehe Bild 2-<br />
3), z.B. KS 1 , wenn das erste KS den Index 0 hat.<br />
e z1<br />
Ortsvektor<br />
zum Punkt 1<br />
Bild 2-3<br />
e y1<br />
6. Bei solch einem Koordinatensystem ist bei einer Drehung der x-<br />
Achse auf kürzestem Weg in die y-Achse eine gleichzeitige Bewegung<br />
in Richtung der z-Achse definiert (Rechtsschraube).<br />
z<br />
P 1 ( x 1<br />
, y 1 , z 1 )<br />
P(x,y,z)<br />
KS 1<br />
U 1<br />
P = 0 ezo<br />
e Ortsvektor<br />
x1<br />
zum Punkt 0<br />
e xo<br />
KS<br />
0<br />
Koordinatentransformation<br />
eines Punktes<br />
x<br />
Y<br />
Ergebnisvektor aus<br />
Koordinatentransformation:<br />
Punkt 1 beschrieben in KS 0<br />
eyo<br />
Seite 2 November 1998 Mathematische Grundlagen