EASY-ROB Dokumentation - physicstoDot
EASY-ROB Dokumentation - physicstoDot
EASY-ROB Dokumentation - physicstoDot

Sie wollen auch ein ePaper? Erhöhen Sie die Reichweite Ihrer Titel.
YUMPU macht aus Druck-PDFs automatisch weboptimierte ePaper, die Google liebt.
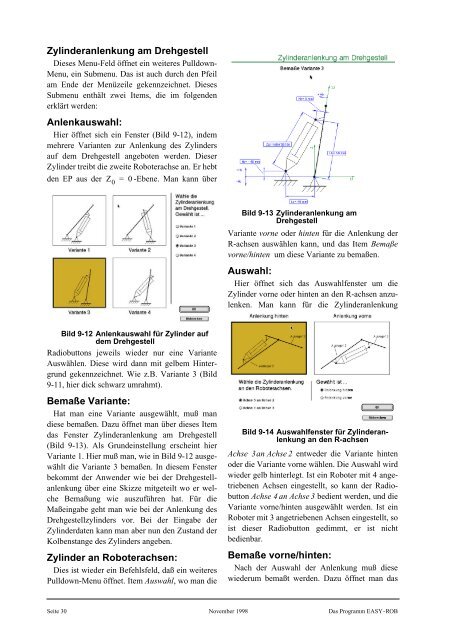
Zylinderanlenkung am Drehgestell<br />
Dieses Menu-Feld öffnet ein weiteres Pulldown-<br />
Menu, ein Submenu. Das ist auch durch den Pfeil<br />
am Ende der Menüzeile gekennzeichnet. Dieses<br />
Submenu enthält zwei Items, die im folgenden<br />
erklärt werden:<br />
Anlenkauswahl:<br />
Hier öffnet sich ein Fenster (Bild 9-12), indem<br />
mehrere Varianten zur Anlenkung des Zylinders<br />
auf dem Drehgestell angeboten werden. Dieser<br />
Zylinder treibt die zweite Roboterachse an. Er hebt<br />
den EP aus der<br />
Z 0 = 0<br />
-Ebene. Man kann über<br />
Bild 9-13 Zylinderanlenkung am<br />
Drehgestell<br />
Variante vorne oder hinten für die Anlenkung der<br />
R-achsen auswählen kann, und das Item Bemaße<br />
vorne/hinten um diese Variante zu bemaßen.<br />
Auswahl:<br />
Hier öffnet sich das Auswahlfenster um die<br />
Zylinder vorne oder hinten an den R-achsen anzulenken.<br />
Man kann für die Zylinderanlenkung<br />
Bild 9-12 Anlenkauswahl für Zylinder auf<br />
dem Drehgestell<br />
Radiobuttons jeweils wieder nur eine Variante<br />
Auswählen. Diese wird dann mit gelbem Hintergrund<br />
gekennzeichnet. Wie z.B. Variante 3 (Bild<br />
9-11, hier dick schwarz umrahmt).<br />
Bemaße Variante:<br />
Hat man eine Variante ausgewählt, muß man<br />
diese bemaßen. Dazu öffnet man über dieses Item<br />
das Fenster Zylinderanlenkung am Drehgestell<br />
(Bild 9-13). Als Grundeinstellung erscheint hier<br />
Variante 1. Hier muß man, wie in Bild 9-12 ausgewählt<br />
die Variante 3 bemaßen. In diesem Fenster<br />
bekommt der Anwender wie bei der Drehgestellanlenkung<br />
über eine Skizze mitgeteilt wo er welche<br />
Bemaßung wie auszuführen hat. Für die<br />
Maßeingabe geht man wie bei der Anlenkung des<br />
Drehgestellzylinders vor. Bei der Eingabe der<br />
Zylinderdaten kann man aber nun den Zustand der<br />
Kolbenstange des Zylinders angeben.<br />
Zylinder an Roboterachsen:<br />
Dies ist wieder ein Befehlsfeld, daß ein weiteres<br />
Pulldown-Menu öffnet. Item Auswahl, wo man die<br />
Bild 9-14 Auswahlfenster für Zylinderanlenkung<br />
an den R-achsen<br />
Achse 3an Achse 2 entweder die Variante hinten<br />
oder die Variante vorne wählen. Die Auswahl wird<br />
wieder gelb hinterlegt. Ist ein Roboter mit 4 angetriebenen<br />
Achsen eingestellt, so kann der Radiobutton<br />
Achse 4an Achse 3 bedient werden, und die<br />
Variante vorne/hinten ausgewählt werden. Ist ein<br />
Roboter mit 3 angetriebenen Achsen eingestellt, so<br />
ist dieser Radiobutton gedimmt, er ist nicht<br />
bedienbar.<br />
Bemaße vorne/hinten:<br />
Nach der Auswahl der Anlenkung muß diese<br />
wiederum bemaßt werden. Dazu öffnet man das<br />
Seite 30 November 1998 Das Programm <strong>EASY</strong>-<strong>ROB</strong>