

Ein zeitkontinuierlicher Sigma-Delta Modulator mit ... - DGBMT
Ein zeitkontinuierlicher Sigma-Delta Modulator mit ... - DGBMT
Ein zeitkontinuierlicher Sigma-Delta Modulator mit ... - DGBMT

Erfolgreiche ePaper selbst erstellen
Machen Sie aus Ihren PDF Publikationen ein blätterbares Flipbook mit unserer einzigartigen Google optimierten e-Paper Software.
<strong>Ein</strong> <strong>zeitkontinuierlicher</strong> <strong>Sigma</strong>-<strong>Delta</strong> <strong>Modulator</strong> <strong>mit</strong><br />
Stromquellen-Rückkopplung und reduzierter Clock-Jitter<br />
Empfindlichkeit<br />
Maurits Ortmanns, Friedel Gerfers, Yiannos Manoli<br />
Albert-Ludwigs-Universität, Lehrstuhl für Mikroelektronik<br />
D-79110 Freiburg. maurits@imtek.uni-freiburg.de<br />
Abstract<br />
In diesem Paper wird eine vorher nicht veröffentlichte Technik für die Reduktion der Clock-Jitter<br />
Empfindlichkeit <strong>zeitkontinuierlicher</strong> <strong>Sigma</strong>-<strong>Delta</strong> <strong>Modulator</strong>en vorgestellt. Hierzu wird die Haupt-Fehlerquelle, der<br />
Rückkopplungs-Digital/Analog Umsetzer durch eine abfallende Pulsform realisiert, die von einer Transistor-Stromquelle<br />
und einer steuernden <strong>Ein</strong>heit erzeugt wird. In dieser ersten Implementierung wurde ein <strong>zeitkontinuierlicher</strong><br />
<strong>Modulator</strong> dritter Ordnung entworfen, der ¼ Dynamikbereich erreicht und dabei nur ¾¼Ï aus einer ½Î<br />
Spannungsversorgung verbraucht; gleichzeitig konnte die Jitter-Empfindlichkeit merklich reduziert werden.<br />
1. <strong>Ein</strong>führung<br />
In abgetasteten Systemen führt ein zeitliches Jitter des<br />
Systemtaktes zu einer uneinheitlichen Abtastung, was in<br />
Rauschquellen unterschiedlichster Art und Form resultiert.<br />
In zeitdiskreten (DT) <strong>Sigma</strong>-<strong>Delta</strong> (¦¡) <strong>Modulator</strong>en,<br />
die üblicherweise in Schalter-Kondensator (SC) Technik<br />
implementiert werden, ist die Variation der übertragenen<br />
Ladungsmenge pro Taktzyklus relativ niedrig, da diese<br />
<strong>Modulator</strong>en <strong>mit</strong> niedriger <strong>Ein</strong>schwingzeit ausgeführt<br />
werden. Dies wiederum führt dazu, dass der größte Teil<br />
der auf den Kapazitäten gespeicherten Ladung zu Beginn<br />
einer Taktperiode verarbeitet, d.h. übertragen wird [1].<br />
Deshalb liegt die Hauptfehlerquelle durch Clock-Jitter in<br />
DT <strong>Modulator</strong>en am Abtasthalteglied des <strong>Ein</strong>gangs, wo<br />
ein zeitlicher Abtastfehler zu einem äquivalenten Amplitudenfehler<br />
des Abtastsignals wird. Für ein unkorreliertes,<br />
Gauss-verteiltes Takt-Jitter <strong>mit</strong> einer Standardabweichung<br />
von Ø ¾ , ist diese dominante Rauschleistung proportional<br />
<br />
zu<br />
¾ <br />
ÇËÊ<br />
, wobei OSR die Überabtastrate des <strong>Modulator</strong>s<br />
¿<br />
ist [1].<br />
Neben diesen zeitdiskreten <strong>Modulator</strong>en ist in den letzten<br />
Jahren die Anzahl der Publikationen über die so genannten<br />
zeitkontinuierlichen ¦¡ <strong>Modulator</strong>en stetig angestiegen,<br />
wobei gleichzeitig auch das industrielle Interesse<br />
wächst. Dies ist vor allem durch die wesentlichen Vorteile<br />
gegenüber den DT Implementierungen begründet:<br />
ein implizites Anti-Aliasing-Filter, die Verlagerung des<br />
Abtastprozesses ins Innere des <strong>Modulator</strong>s, sowie Geschwindigkeitsvorteile<br />
bezüglich der aktiven Elemente,<br />
was schließlich auch zu extrem niedrigen Verlustleistungen<br />
führt [2] [3] [4].<br />
Diese Vorteile werden jedoch erkauft <strong>mit</strong> einer schlechteren<br />
Synthesisierbarkeit und vor allem <strong>mit</strong> einer erhöhten<br />
Empfindlichkeit gegenüber nichtidealen Eigenschaften,<br />
insbesondere dem erwähnten Takt-Jitter.<br />
Im Gegensatz zu den DT <strong>Modulator</strong>en ist bei den<br />
Ë<br />
ٴص Ê <br />
ܴص<br />
Ü´Òµ Ý´Òµ<br />
Ê<br />
ݴص<br />
¦Î Ö<br />
<br />
ݴص<br />
Ì Ë<br />
Ø<br />
(a) NRZ-<strong>Modulator</strong> Implementierung<br />
ٴص Ê<br />
<br />
Ë<br />
ܴص ܴҵ ݴҵ<br />
Ê Ê<br />
ݴص<br />
Ê<br />
<br />
¦Î Ö<br />
ݴص<br />
<br />
Ì Ë<br />
Ø<br />
(b) SCR-<strong>Modulator</strong> Implementierung [5]<br />
ÐÙÒ ½º Ì ¦¡ ÅÓÙÐØÓÖ ÙÒØÖ×ÐÒ Í<br />
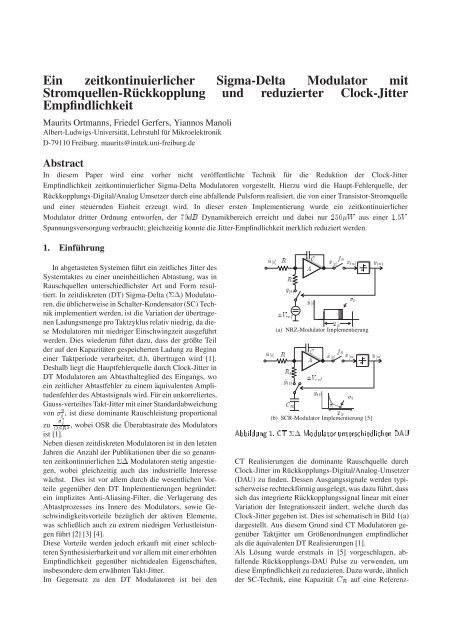
CT Realisierungen die dominante Rauschquelle durch<br />
Clock-Jitter im Rückkopplungs-Digital/Analog-Umsetzer<br />
(DAU) zu finden. Dessen Ausgangssignale werden typischerweise<br />
rechteckförmig ausgelegt, was dazu führt, dass<br />
sich das integrierte Rückkopplungssignal linear <strong>mit</strong> einer<br />
Variation der Integrationszeit ändert, welche durch das<br />
Clock-Jitter gegeben ist. Dies ist schematisch in Bild 1(a)<br />
dargestellt. Aus diesem Grund sind CT <strong>Modulator</strong>en gegenüber<br />
Taktjitter um Größenordnungen empfindlicher<br />
als die äquivalenten DT Realisierungen [1].<br />
Als Lösung wurde erstmals in [5] vorgeschlagen, abfallende<br />
Rückkopplungs-DAU Pulse zu verwenden, um<br />
diese Empfindlichkeit zu reduzieren. Dazu wurde, ähnlich<br />
der SC-Technik, eine Kapazität Ê auf eine Referenz-
Ï<br />
Ä Ô½<br />
Ï<br />
Ä Ò½<br />
Ï<br />
Ä<br />
ËÊ Ï<br />
Ô¾<br />
Ä<br />
Ô½ ËÊ Ô¿<br />
Ô¾ ËÊ Ô¿<br />
¾ ½<br />
¿<br />
ÁÒ Ô<br />
Ê ½ ÁÒØ ½ Ê ¾ ÁÒØ ¾ Ê ¿ ÁÒØ ¿<br />
ÁÒ Ò<br />
½<br />
¾<br />
¿<br />
ËÊ Ò½ ËÊ Ò¾ ËÊ Ò¿<br />
Ï<br />
Ä Ï<br />
Ò¾<br />
Ä Ò¿<br />
(a) Architektur des voll-differentiellen <strong>Modulator</strong>s<br />
ÃÓÑÔ<br />
² <br />
ÐÓ<br />
ÇÙØ<br />
¨<br />
Ê<br />
Î <br />
¨<br />
Î ÐÓÛ<br />
¨<br />
¨<br />
ÇÔÑÔ ÁÒÔÙØ <br />
Î Å ¼ÑÎ<br />
Ê Ê<br />
(b) SCR-I - Schaltung<br />
ÐÙÒ ¾º ÖØØÙÖ × ÅÓÙÐØÓÖ× ¿ Ö ÇÖÒÙÒ ÑØ ËʹÁ ÊĐÙÓÔÔÐÙÒ<br />
Á Ò <br />
Î ÐÓÛ Ò<br />
spannung aufgeladen, um dann im Rückkopplungszeitraum<br />
über einen zusätzlich integrierten Widerstand Ê Ê<br />
auf den Integrator-<strong>Ein</strong>gang entladen zu werden. Da<strong>mit</strong><br />
wird ein exponentiell abfallender Rückkopplungspuls exakt<br />
bestimmt, und zwar einmal durch die Zeitkonstante<br />
Ê Ê Ê und zum zweiten durch den begrenzenden<br />
Widerstand Ê Ê , der zusammen <strong>mit</strong> der Referenzspannung<br />
den Maximalwert des Strompulses bestimmt. Die<br />
entsprechende Schaltung wurde SCR-Rückkopplung benannt<br />
und ist im Bild 1(b) dargestellt. <strong>Ein</strong>e weiterführende<br />
theoretische Betrachtung zur Synthese wird in [6] gegeben,<br />
während in [7] die erste implementierte Schaltung<br />
vorgestellt wurde.<br />
Nichtsdestotrotz wird diese Technik von einigen<br />
Nichtidealitäten begleitet: <strong>Ein</strong> endliches Verstäkungs-<br />
Bandbreite-Produkt der Operationsverstärker (ÇÔÑÔ)<br />
verursacht eine Verlangsamung des Entladeprozesses, da<br />
der Integrator-Ausgang dem schnellen <strong>Ein</strong>gangspuls nicht<br />
folgen kann [8]. Deshalb erscheint die Pulsflanke langsamer<br />
als berechnet und die Empfindlichkeit gegenüber dem<br />
Takt-Jitter erhöht sich.<br />
Darüberhinaus erschwert sich die Implementierung eines<br />
<strong>Modulator</strong>s <strong>mit</strong> interner Multi-Bit Quantisierung durch<br />
die Verwendung der SCR-Technik: Multi-Bit Quantisierung<br />
wird eingesetzt, um die Auflösung und Stabilität<br />
eines <strong>Modulator</strong>s zu erhöhen, erfordert jedoch einen sehr<br />
linearen Rückkopplungs-DAU, was üblicherweise durch<br />
Linearisierungstechniken wie das ÝÒÑ ÐÑÒØ<br />
ÅØÒ (DEM) erreicht wird. Diese Technik ist jedoch<br />
nicht einfach auf den SCR-DAU übertragbar, da in<br />
diesem Fall 2 unterschiedliche Elemente in der Rückkopplung<br />
verwendet werden ( Ê ² Ê Ê ), die beide im<br />
Bereich der Auflösung des <strong>Modulator</strong>s abgestimmt, d.h.<br />
linearisiert werden müßten. Die DEM-Techniken basieren<br />
jedoch auf nur einem Rückkopplungselement.<br />
Dementsprechend wird in diesem Paper eine Alternative<br />
zur SCR-Technik vorgeschlagen, die auf der Implementierung<br />
des Rückkopplungs-DAU durch Transistorstromquellen<br />
basiert, die von einer abfallenden Spannungsflanke<br />
gesteuert werden. Da<strong>mit</strong> wird es möglich, die genannten<br />
Nachteile der SCR-Technik zu umgehen. In diesem<br />
Paper wird die prinzipielle Funktionalität dieser neuen<br />
Technik präsentiert.<br />
In Kapitel 2 wird ein Überblick über den vorgschlagenen<br />
Strom-DAU <strong>mit</strong> abfallender Flanke gegeben. Die Synthese<br />
und Implementierung des hier vorgestellten <strong>Modulator</strong>s<br />
¿ Ö Ordnung wird in Kapitel 3 gezeigt, während Kapitel 4<br />
die erhaltenen Messergebnisse präsentiert. Kapitel 5 behandelt<br />
die auftretenden Nichtidealitäten und Kapitel 6<br />
enthält eine kurze Zusammenfassung.<br />
2. Die SCR-I Rückkopplungstechnik<br />
Wie schon einleitend erwähnt, birgt der <strong>Ein</strong>satz der<br />
SCR-Technik, also die Generierung eines abfallenden<br />
DAU-Spannungpulses durch Entladung einer Kapazität<br />
über einen Widerstand auf den Integratoreingang einige<br />
nichtideale Eigenschaften, darunter die Abhängigkeit<br />
des Entladungsprozesses vom virtuellen Masseknoten am<br />
<strong>Ein</strong>gang der OpAmp [8] und zusätzlich die umständliche<br />
oder gar unmögliche Implementierung einer DEM-<br />
Technik für die nun 2 vorhandenen Rückkopplungselemente.<br />
Deshalb wird hier vorgeschlagen eine Stromquellen-<br />
Rückkopplung zu verwenden, deren Steuerspannung als<br />
abfallende Flanke ausgebildet ist, wobei diese Flanke linear,<br />
exponentiell oder andersartig sein kann. Da<strong>mit</strong> wird<br />
das Rückkopplungssignal unabhängig vom <strong>Ein</strong>gangsknoten<br />
des Integrators, die Jitterempfindlichkeit unabhängig<br />
vom OpAmp und zusätzlich wird die Implementierung<br />
eines Multi-Bit Rückkopplungs-DAC sehr einfach, da nur<br />
noch ein Stromquellenarray linear abzustimmen ist.<br />
<strong>Ein</strong>e schematische Darstellung der vorgeschlagenen Technik<br />
ist in Abb. 2(a) für den hier präsentierten <strong>Modulator</strong><br />
¿ Ö Ordnung gezeigt: die Rückkopplungssignale werden<br />
von Transistor-Stromquellen generiert, deren Gate-<br />
Steuerspannung als abfallende Spannungen anliegen.<br />
Um einen zu [7] vergleichbaren <strong>Modulator</strong> zu erhalten<br />
werden diese Steuerspannungen ähnlich der ursprünglichen<br />
SCR-Technik exponentiell von einer Kapazitäts-<br />
Widerstands-Anordnung gebildet, die in Abb. 2(b) gezeigt<br />
ist. Hier wird die Kapaztität in der ersten Takthälfte<br />
(¨) auf eine Anfangsspannung Î aufgeladen, welche<br />
den anfänglichen Strompeak erzeugen soll. In der zweiten
Takthälfte (¨) wird die Kapazität über den Widerstand exponentiell<br />
auf eine Endspannung Î ÐÓÛ entladen, und zwar<br />
<strong>mit</strong> einer Zeitkonstanten Î Ê Ê Ê . In Anlehnung an<br />
[7] wurde die resultierende Rückkopplungsstruktur SCR-I<br />
Technik benannt.<br />
3. <strong>Modulator</strong> Synthese<br />
Üblicherweise wird die Synthese eines zeitkontinuierlichen<br />
¦¡ <strong>Modulator</strong>s auf Grundlage einer DT-to-<br />
CT Transformation durchgeführt, wodurch CT Integrator-<br />
Skalierungskoeffizienten so berechnet werden, dass eine<br />
CT-DT <strong>Modulator</strong>-Äquivalenz erreicht wird [3]. Dies<br />
wurde in [7] unter Zuhilfenahme der Berechnungen in [6]<br />
für einen SCR-<strong>Modulator</strong> durchgeführt. Durch die ähnliche<br />
Form der Rückkopplungspulse kann diese Methode<br />
auch für den hier vorgestellten <strong>Modulator</strong> genutzt werden.<br />
Um eine spürbare Verminderung der Empfindlichkeit gegenüber<br />
Takt-Jitter zu erreichen wurden die Zeitkonstanten<br />
der Rückkopplungspulse wie folgt gewählt:<br />
Á½ ± Ì Ë Á¾ ½¼± Ì Ë Á¿ ½¼± Ì Ë (1)<br />
wobei Ì Ë die Abtastzeit des <strong>Modulator</strong>s ist. Da<strong>mit</strong> können<br />
wie in [7] und [6] die Skalierungskoeffizienten der Integratoren<br />
bestimmt werden:<br />
Ëʽ ½ Ëʾ ¿ ËÊ¿ (2)<br />
Die Aufgabe besteht nun darin, aus diesen Skalierungskoeffizienten<br />
die Dimensionierung der Rückkopplungselemente<br />
zu bestimmen, was im Fall der abfallenden<br />
Stromquellen-Rückkopplung schwieriger ist, als für die<br />
reine SCR-Technik in [7]. Der Grund hierfür ist, dass der<br />
Transformationsprozess in [6] für exponentiell abfallende<br />
Rückkopplungspulse entwickelt wurde, deren Endwert<br />
gegen Null tendiert. Im Fall der SCR-I Rückkopplung<br />
werden diese Pulse aber von Stromquellen erzeugt, deren<br />
unterer Grenzwert von der Referenzspannung Î ÐÓÛ in<br />
Abb. 2(b) abhängt.<br />
Deshalb stellt sich die Frage, wie die Größe dieses Endspannungswertes<br />
gewählt werden kann, der nach obigen<br />
Überlegungen die Stromquelle vollständig abschalten<br />
sollte. Dies ist prinzipiell nur durch eine vollständige<br />
’Abschaltung’ der Transistor-Gates möglich, was jedoch<br />
gewöhnlich vermieden wird, weil es die Stromquelle sehr<br />
weit in die schwache Inversion führt. Dabei würde der<br />
Rückkopplungsstrom nicht mehr rein exponentiell verlaufen<br />
und da<strong>mit</strong> der Transformation nach [6] widersprechen.<br />
Der <strong>Ein</strong>fachheit halber wurde deshalb das einfachste Transistormodel<br />
der starken Inversion angenommen, nach dem<br />
der Transistorstrom versiegt, wenn die effektive Gate-<br />
Source-Spannung Î × ¼ ist. Dann kann die ’untere’<br />
Referenzspannung Î ÐÓÛ in Abb. 2(b) als Threshold-<br />
Spannung Î Ø des entsprechenden Rückkopplungstransistors<br />
gewählt werden.<br />
Da<strong>mit</strong> erhält man für den Rückkopplungsstrompuls:<br />
Á ¬ ¼ Ï<br />
ÐÓÛ <br />
¾ Ä Î ¡ ¾<br />
× ÐÓÛ Î Ø (3)<br />
Î × ÐÓÛ Î × ¡ ÜÔ ØÈ Î (4)<br />
worin Î × die Gate-Source Spannungen der Stromquellen<br />
und Á ÐÓÛ die obere und untere Grenze des Rückkopplungsstroms<br />
sind. Ø È Ì Ë ¾ entspricht der Dauer<br />
des Pulses. Durch die quadratische Abhängigkeit des<br />
Transistorstroms von der entsprechenden Gatespannung<br />
halbiert sich die Zeitkonstante des Strompulses im Vergleich<br />
zur Zeitkonstante der Steuerspannung und da<strong>mit</strong><br />
der RC-Schaltung in Abb. 2(b), weshalb diese gegenüber<br />
dem gewünschten Designziel in Gl. 1 verdoppelt werden<br />
muss.<br />
Á Î<br />
¾<br />
Ê<br />
¾<br />
(5)<br />
Î × ÐÓÛ Î × ¡ ÜÔ Ì Ë ¾<br />
¾ Á (6)<br />
Unter Berücksichtigung der Verhältnisse der Widerstände,<br />
Kapazitäten und Skalierungskoeffizienten an jedem Integrator,<br />
¡ Ë ½<br />
Ê <br />
, sowie <strong>mit</strong> der Umformung<br />
Á Î Ê<br />
Ê <br />
, wobei Á der Rückkopplungsstrom-Peak und<br />
Î Ê die Referenzspannung des <strong>Modulator</strong>s ist, können<br />
die Rückkopplungsstromquellen folgendermassen skaliert<br />
werden:<br />
Á ¡ Î Ê ¡ Ë ¡ (7)<br />
Ï<br />
Ä ¾ Î Ê Ë <br />
¬ ¼ Î × <br />
(8)<br />
Mit <strong>Modulator</strong>-Spezifikationen wie in [4] und [7]:<br />
½ Ô ¾ ¿ ½Ô (9)<br />
Î Ê ¼ÑÎ Ë ¾ÅÀÞ<br />
und einer gewählten Peak-Steuerspannung in Abb. 2(b)<br />
Î Ò ¿¼¼ÑÎ · Î Ø Ò und Î Ô Î <br />
¿¼¼ÑÎ · Î Ø Ô , wobei Î ÐÓÛ Ò Î Ø Ò und Î ÐÓÛ Ô <br />
Î Î Ø Ô , erhält man für die Transistorskalierung in<br />
Abb. 2(a):<br />
Ï<br />
Ä Ò½ ½<br />
Ï<br />
Ä Ò¾ ½<br />
Ï<br />
Ä Ò¿ ¾¿ (10)<br />
wobei die p-Kanal-Transistoren um einen Faktor ¬Ò<br />
¬ Ô<br />
<br />
breiter gewählt werden müssen.<br />
Nach diesen Spezifikationen und einer Architektur wie<br />
in Abb. 2(a) wurde ein <strong>Modulator</strong> ¿ Ö Ordnung in einer<br />
¿¿Î ¼Ñ Standard CMOS Technologie entworfen.<br />
Das Signalbasisband wurde zu ¾ÀÞ, die<br />
Überabtastung zu ÇËÊ gewählt [4] [7]. Das Chip-<br />
Photo der Schaltung ist in Abb. 3 gezeigt. Der entworfene<br />
<strong>Modulator</strong> verbraucht nur ¾¼Ï aus einer ½Î<br />
Spannungsversorgung. Die Kern-Chipfläche beträgt weniger<br />
als ½¾ÑÑ ¾ .
×Ö ÅÓÙÐØÓÖ<br />
ËÆÊ ËÆÊ ℄<br />
¼<br />
¼<br />
¼<br />
¼<br />
¿¼<br />
¾¼<br />
Ñ××ÒÖ ËÆÊ<br />
Ñ××ÒÖ ËÆÊ<br />
ÖÛØÖØÖ È ÐÓØ<br />
4. Messergebnise<br />
ÐÙÒ ¿º Ô¹ÈÓØÓ<br />
Der so implementierte <strong>Modulator</strong> <strong>mit</strong> SCR-I Rückkopplung<br />
wurde sowohl bezüglich seiner generellen Performance<br />
vermessen, um die Funktionalität des ¦¡ <strong>Modulator</strong>s<br />
¿ Ö Ordnung <strong>mit</strong> der neuen Rückkopplungstechnik<br />
zu zeigen, als auch bezüglich der Empfindlichkeit<br />
gegenüber Takt-Jitter, was das eigentliche Ziel der Struktur<br />
ist. Für alle Messungen wurde der 1-bit Ausgangsdatenstrom<br />
<strong>mit</strong> Hilfe eines Logic-Analyzers (ÀȽ¼¼)<br />
aufgenommen. Daraus wurde dann eine Ì <strong>mit</strong>tels<br />
ÅÌÄ berechnet. Der Clock-Jitter Messaufbau<br />
wurde gewählt, wie in [7] beschrieben.<br />
Abb. 4 zeigt ein so erhaltenes Leistungsdichtespektrum<br />
(LDS) des <strong>Modulator</strong>s <strong>mit</strong> SCR-I Rückkopplung für ein<br />
<strong>Ein</strong>gangssignal bei ÀÞ. Zusätzlich ist das integrierte<br />
Inband-Rauschen (ÁÆ) gegeben. Es ist offensichtlich,<br />
dass der Pegel des weissen Rauschens den dynamischen<br />
Bereich bestimmt, was in einem Inband-Rauschen von etwa<br />
ÁÆ ¼ resultiert. In [4] waren dies <br />
für eine Non-Return-to-Zero Implementierung und in [7]<br />
¼ für die SCR Implementierung. Der Grund für die-<br />
ÄË ℄<br />
¼<br />
¼<br />
½¼¼<br />
½¼<br />
ÄË × ËÊ Á<br />
ÁÒØÖ ÁÒÒ ÊÙ×Ò<br />
½¼ ¾ ½¼ ½¼ <br />
ÖÕÙÒÞ ÀÞ℄<br />
<br />
<br />
ÐÙÒ º Ä×ØÙÒ×عËÔØÖÙÑ<br />
sen Anstieg des IBN kann durch eine grobe Abschätzung<br />
des weissen Rauschstroms der Stromquellen der ersten<br />
Rückkopplungsschleife gefunden werden:<br />
¾ ÒØ ¿ Ì<br />
½<br />
ÑÒ<br />
<br />
¾<br />
¾<br />
ÀÞ<br />
(11)<br />
wobei Ì ¿¼¼Ã sowie die Boltzman Konstante<br />
ist, und die Trankonduktanz ÑÒ aus den Gleichungen<br />
2, 7 und 10 berechnet werden kann. Dabei gilt für<br />
½¼<br />
¼<br />
¼<br />
¼<br />
¼<br />
Î Ò<br />
Î<br />
℄<br />
Ö<br />
ÐÙÒ º ËÒйÊÙ×¹´×ØÓÖØÓÒµ¹×ØÒ<br />
¬ Ò ½¼¼ <br />
Î ¾ . Durch Multiplikation der Rauschstromdichte<br />
<strong>mit</strong> dem Skalierungwiderstand des <strong>Ein</strong>gangssignals<br />
Ê ½ ¾Å Å [4], erhält man die eingangsbezogene<br />
Rausch-Spannungsdichte:<br />
ÚÒØ ¾ ¾<br />
ʾ ½ ¡ ¾ ½¾ Î<br />
ÒØ ¾¿ (12)<br />
ÀÞ<br />
welche sich zu einem ½½ Rauschpegel übertragen<br />
läßt. Wenn man zusätzlich das Rauschen des p-Kanal-<br />
Transistors hizunimmt, ergibt sich ein weiterer Anstieg<br />
um ¿. In Abb. 4 ist diese überschlägige Abschätzung<br />
klar bestätigt.<br />
Abb. 5 zeigt den gemessenen Signal-Rausch-Abstand,<br />
gemessen bei Ë ¾À sowie den Signal-Rausch<br />
und Distortion-Abstand, gemessen bei Ë À, des<br />
<strong>Modulator</strong>s <strong>mit</strong> SCR-I Rückkopplung. Hierbei wurde das<br />
Inband-Rauschen abzüglich des dc-Signals ab ca. 100Hz<br />
bis zur Bandkante ¾ÀÞ aufsummiert. Wie oben<br />
gezeigt wird der dynamische Bereich durch das weisse<br />
Rauschen der Transistor-Stromquellen begrenzt, erreicht<br />
jedoch nichtsdestotrotz einen Wert von Ê ¼ <strong>mit</strong><br />
klaren 10 Bit Auflösung.<br />
Bezüglich der Empfindlichkeit gegenüber Takt-Jitter ist<br />
bekannt, dass die zeitliche Modulation dem Ausgangsspektrum<br />
eines zeitkontinuierlichen <strong>Modulator</strong>s über die<br />
Rückkopplungspfade weisses Rauschen hinzufügt [1].<br />
Durch die Implementierung des DAU <strong>mit</strong> abfallenden<br />
Flanken ist zu erwarten, dass dieses weisse Rauschen im<br />
Vergleich zu einem <strong>Modulator</strong> <strong>mit</strong> NRZ Rückkopplung<br />
abnimmt [6]. Dies wird in Abb. 6 gezeigt, wo das LDS des<br />
hier vorgestellten <strong>Modulator</strong>s <strong>mit</strong> SCR-I Rückkopplung<br />
unter dem <strong>Ein</strong>fluss von Ø ½¼±ÌË Takt-Jitter gezeigt<br />
ist. Zum Vergleich wurde zusätzlich ein <strong>Modulator</strong> <strong>mit</strong><br />
rechteckförmiger, NRZ-Rückkopplung vermessen [4].<br />
Hier wird deutlich, dass der Rauschpegel beim <strong>Modulator</strong><br />
<strong>mit</strong> SCR-I Rückkopplung um fast ¾¼ unter dem des<br />
’gewöhnlichen’ <strong>Modulator</strong>s liegt. Als zusätzliches Resultat<br />
dieser Messung konnten zum ersten Mal die in der<br />
Literatur erwähnten nicht-weissen Rauschschürzen um<br />
den Signalpeak nachgewiesen werden, die das so genannte<br />
akkumulierte VCO-Takt-Jitter verursacht [3][9].<br />
In Abb.7 ist das gemessene Inband Rauschen des hier vorgestellten<br />
<strong>Modulator</strong>s <strong>mit</strong> SCR-I Rückkopplung über dem<br />
¾¼<br />
½¼<br />
¼
ÄË ℄<br />
ÄË ℄<br />
¼<br />
¼<br />
½¾¼<br />
½¼ ½ ½¼ ¾ ÖÕÙÒÞ ÀÞ℄ ½¼ ½¼ <br />
(a) NRZ-<strong>Modulator</strong><br />
¼<br />
¼<br />
½¾¼<br />
½¼ ½ ½¼ ¾ ÖÕÙÒÞ ÀÞ℄ ½¼ ½¼ <br />
(b) SCR-I-<strong>Modulator</strong><br />
ÐÙÒ º ÄË Ò× ÆÊ ÙÒ ×× ËʹÁ ÅÓÙ¹<br />
ÐØÓÖ× ÙÒØÖ ÐÓ¹ÂØØÖ ÒÙ×׸ Ø ½¼±Ì Ë<br />
ÁÆ ℄<br />
<br />
¼<br />
<br />
¼<br />
<br />
¼<br />
ËÊ Á ÅÓÙÐØÓÖ<br />
ÆÊ ÅÓÙÐØÓÖ 7℄<br />
ÁÐ× ÁÆ <br />
ÔÔÖÓÜ ÂØØÖ ÁÆ<br />
<br />
¼¼½ ¼½ ½ ½¼<br />
Ø ± Ì Ë ℄<br />
ÐÙÒ º Ñ××Ò× ÁÆ ÙÒØÖ ÐÓ¹ÂØØÖ Ò¹<br />
Ù××<br />
Clock-Jitter des Systems aufgetragen und <strong>mit</strong> dem Verhalten<br />
eines NRZ-<strong>Modulator</strong>s [7] [4] verglichen. An dieser<br />
Stelle wird die Funktionalität des vorgestellten Konzepts<br />
besonders deutlich, da in dieser ersten Implementierung<br />
und trotz der groben Annäherung des Transistorverhaltens<br />
im Model in Gl. 3 eine deutliche Absenkung der Empfindlichkeit<br />
gegenüber Takt-Jitter erreicht werden konnte, die<br />
mehr als ½¼ für grosse Werte von Ø beträgt.<br />
In Tabelle 1 sind die Ergebnisse und Eigenschaften der<br />
implementierten Schaltung <strong>mit</strong> SCR-I Rückkopplung zusammengestellt<br />
und <strong>mit</strong> einer älteren Schaltung <strong>mit</strong> rechteckförmiger<br />
Rückkopplung verglichen[7, 4].<br />
5. Nicht-Idealitäten und<br />
Verbesserungsmöglichkeiten<br />
Neben den erreichten Ergebnissen sind zwei Ursachen<br />
nicht-idealen Verhaltens besonders zu benennen: Zum<br />
einen reduziert das weisse Transistor-Stromrauschen den<br />
dynamischen Bereich des <strong>Modulator</strong>s, was die Auflösung<br />
hinter die theoretisch möglichen Werte zurückfallen läßt.<br />
Jedoch ist dieses Verhalten stark von der jeweiligen Im-<br />
ÌÐÐ ½º Ù×ÑÑÒ××ÙÒ Ö Ò×ØÒ<br />
Ì ÒÓÐÓ<br />
Î<br />
ËÒÐ ÖÕ<br />
Ø×Ø ÖÕ<br />
Ä×ØÙÒ×ÚÖÖ<br />
ÆÊ<br />
ËÊ Á<br />
¼ Ñ ¿¿ Î ÅÇË<br />
½ Î<br />
¾ ÀÞ<br />
¾ ÅÀÞ<br />
¾¼ Ï<br />
ÝÒ Ö ½ <br />
ÑÜ ËÒ ÊÙ× ×Ø ¼ ¿<br />
ÅÜ Ì ÓÐÖÖÖ×Ø Ø ½±ÌË Ø ±ÌË<br />
ÁÆ ¼<br />
plementierung abhängig, und zwar betreffend der Architektur,<br />
der Abtastfrequenz und anderer Faktoren, was eine<br />
Vermeidung in zukünftigen Entwürfen leicht möglich<br />
macht.<br />
Die weitaus grössere Aufgabe, die noch näherer Aufmerksamkeit<br />
bedarf, ist die unzureichende Abschaltung der<br />
Stromquelle am Ende der abfallenden Flanke, was durch<br />
das nicht-zutreffende Model in Gl. 3 begründet ist und zu<br />
einem Reststromfluss im Moment der Abschaltung durch<br />
den verjitterten Takt führt. Dieser lag nur um einen Faktor<br />
3-4 unter dem Rückkopplungsstrom des ursprünglichen<br />
NRZ-<strong>Modulator</strong>s [4] und ist da<strong>mit</strong> der Grund für die<br />
nicht-ideale Clock-Jitter-Unterdrückung in Abb. 7, wenn<br />
man diese <strong>mit</strong> den idealen Ergebnissen in [6] vergleicht.<br />
<strong>Ein</strong>e mögliche Lösung wäre die Absenkung der unteren<br />
Referenz-Spannung Î ÐÓÛ der Steuerspannung, um die<br />
Stromquelle weiter in den Sperrbereich zu bringen. Andererseits<br />
führte dies sicherlich zu einem Auflösungverlust<br />
durch die folgende Abweichung vom idealen, exponentiellen<br />
Verlauf des Rückkopplungsstroms.<br />
Deshalb bedarf dieser Punkt weiterer theoretischer Betrachtung<br />
oder muss durch Simulation gelöst werden.<br />
6. Zusammenfassung<br />
In diesem Paper wird erstmalig ein <strong>zeitkontinuierlicher</strong><br />
¦¡ <strong>Modulator</strong> <strong>mit</strong> Stromrückkopplung und reduzierter<br />
Empfindlichkeit gegenüber Takt-Jitter vorgestellt. Dazu<br />
wird der Rückkopplungs-Digital/Analog Umsetzer durch<br />
Stromquellen implementiert, deren Steuerspannung als<br />
exponentiell abfallender Puls ausgebildet ist. Im Gegensatz<br />
zu vorangegangenen Techniken wird der Rückkopplungspuls<br />
hierdurch unabhängig vom Integratoreingangspotential<br />
und gleichzeitig wird ein zukünftiger Multi-Bit<br />
Entwurf ermöglicht.<br />
Die vorgeschlagene Schaltungstechnik wurde beispielhaft<br />
in einem verlustleistungsarmen, 1.5V <strong>Modulator</strong> ¿ Ö Ordnung<br />
implementiert. Sowohl die erfolgreiche Synthese als<br />
auch viel versprechende Messergebnisse konnten gezeigt<br />
werden. Trotz zweier dominanter, nicht-idealer Eigenschaften<br />
erreicht der gezeigte <strong>Modulator</strong> einen Dynamik-<br />
Bereich von ¼, wobei die Empfindlichkeit gegenüber<br />
Takt-Jitter um mehr als ½¼ reduziert werden konnte.
7. References<br />
[1] H. Tao, L. Toth, J.M. Khoury, “Analysis of timing jitter in<br />
bandpass sigma-delta modulators,” IEEE Trans. on Cir. and<br />
Sys. -II, 1999, vol. 46, pp. 991–1001.<br />
[2] E.J. van der Zwan, E. C. Dijkmans, “A 0.2-mW CMOS ¦¡<br />
modulator for speech coding with 80 dB dynamic range”,<br />
IEEE J. Solid-State Circuits, 1996, Vol.31, pp. 1873-1880.<br />
[3] J.A. Cherry, W.M. Snelgrove, “Continuous-time <strong>Delta</strong>-<br />
<strong>Sigma</strong> <strong>Modulator</strong>s for High-Speed A/D Conversion”, Kluwer<br />
Academic Pub., 1999.<br />
[4] F. Gerfers, M. Ortmanns, Y. Manoli, “A 12 bit power efficient<br />
continuous-time ¦¡ modulator with ¾¼Ï power<br />
consumption”, Proc. ESSCirC, 2001, pp. 536-539.<br />
[5] M. Ortmanns, X. Huang, and Y. Manoli, “Neue DAU-rückkopplung<br />
für zeitkontinuierliche ¦¡ <strong>Modulator</strong>en”, ITG-<br />
Fachbericht 162, Mikroelektronik für die Informationstechnik,<br />
pp. 221-226, 2000.<br />
[6] M. Ortmanns, F. Gerfers, and Y. Manoli, “Jitter insensitive<br />
Feedback DAC for Continuous-Time ¦¡ <strong>Modulator</strong>s”,<br />
Proc. ICECS, 2001, pp. 1049-1053.<br />
[7] M. Ortmanns, F. Gerfers, Y. Manoli, “A continuous-time<br />
¦¡ modulator with reduced jitter sensitivity”, Proc. ES-<br />
SCirC, 2002, pp. 287-290.<br />
[8] M. Ortmanns, F. Gerfers, Y. Manoli, “The implementation<br />
of a continuous-time sigma-delta modulator with reduced<br />
jitter sensitivity”, GMM/GI/ITG-Fachtagung - Entwurf Integrierter<br />
Schaltungen und Systeme, E.I.S.-Workshop, Erlangen,<br />
2003, accepted on.<br />
[9] A. Berkowitz, I. Rusnak, “FFT processing of randomly sampled<br />
harmonic signals”, IEEE Trans. Signal Processing,<br />
1992, vol. 40, pp. 2816-2819.

