1. Einführung 2. Bewegungsvorgänge Anlauf - EIT Board
1. Einführung 2. Bewegungsvorgänge Anlauf - EIT Board
1. Einführung 2. Bewegungsvorgänge Anlauf - EIT Board

Erfolgreiche ePaper selbst erstellen
Machen Sie aus Ihren PDF Publikationen ein blätterbares Flipbook mit unserer einzigartigen Google optimierten e-Paper Software.
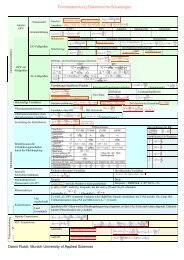
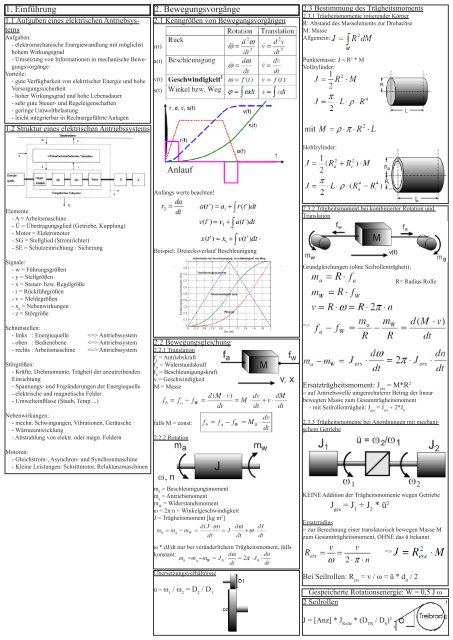
<strong>2.</strong>4 Leistung und EnergieLeistungsbilanz:m aω = zugeführte Antriebsleistung= stationärer Leistungsbedarf + Δ E kinEnergiebilanz:in Zeit Δt = t 2- t 1Antriebsänderung Δω = ω 2- ω 1Arbeit:<strong>2.</strong>5.2 ArbeitsmaschinenFörder-, Umform- und Werkzeugmaschinenzu <strong>2.</strong>5.2 ArbeitsmaschinenStrömungsmaschinenZuwachs kin.Energie derDrehmassenNach Hochlauf (ω = 0 auf ω = ω 0)= gespeicherte kin. Energie<strong>2.</strong>5 Stationäres Verhalten von Antriebs- undArbeitsmaschinenAntriebsmodell als 1 Körper System (d.h. mit Gesamtschwungmasse)stationäre Kennlinie = Zusammenahng der Hauptvariablen(Drehzahl&Drehmoment) bei konstanten Hilfsvariablen(Speisespg, Frequenz ...)<strong>2.</strong>5.1 Elektrischer Antriebsmaschinen1a) Hebezug, Aufzug1b) Walzwerk, Kalandar1c) Drehmaschine1d) Fahrwerk, trockene ReibungAufzüge, Krane, Hebezeuge (1a)= im stationären Betrieb nur Gewichtskraft der Lastf G= Gewichtskraft der Lastv = Hubgeschwindigkeitη = Wirkgrad der ÜbertragerNotwendige, mittlere Antriebsleistung: P W= m W* ω MFahrwerke und Schienenfahrzeuge (1d)= beim Anfahren Haftreibung, danach Widerstandsmomentje nach Fahrwiderstandf G= Gewichtskraft des Fahrzeugsw f= spezifischer Fahrwiderstand inkl. Bahnsteigung, beiRad-Schiene ca. 0,0<strong>1.</strong>..0,03Motor an Seilrolle:v / ω M= r st* ü2a) Kreiselpumpe bei konstanter Förderhöhe2b) Kreiselpumpe bei konstantem Ausströmquerschnitt2c) KolbenpumpeLüfter, Gebläse, Verdichter, Pumpen (2a, 2b)m w= k*ω 2 M (Näherung)mittlere Arbeitsleistung:Q = Förderstromp = Gesamtdruck der PumpeEinheit: [N/m 2 ]Δp = Gegendruckv = Strömungsgeschwindigkeit (=Q/A, A = Querschnitt)ρ = Dichte A = π r 2λ = Rohrwiderstandszifferl R, d R= Rohrlänge, Rohrdurchmesserη = Wirkgrad= Kolbenpumpe = 0,8...0,9 Lüfter: 0,3...0,6a) Gleichstrommotor (Nebenschluss)b) Asynchronmotorc) Gleichstrommotor (Reihenschluss)d) Synchronmotor=> Aufprägungen von Kennliniencharakteristiken je nachgewünschten Eigenschaft durch Regelung (zB n = const)Nebenschlusscharakteristik (a,b,c) = Sinkendes Drehmomentfür große Drehzahlen=> günstig weil diese nicht zu Schwingungen neigenMotor Auswahl:Winkelgeschw. ω T= v / R ers= v / (0,5 D T)Leistungsbedarf Anlage: P L= ω Tm Last,gesamtLeistungsbedarf Motor : P M,min= P L/ η getriebeGetriebe Auswahl:ü soll= ω T/ (2πn )=> 1 / ü soll= gesuchtNotwendige, mittlere Antriebsleistung: P W= m W* ω MSpanabhebende Werkzeugmaschinen (Dreh-, Fräs-, Bohr-,Scheren- und Schneidmaschinen)f S= Schnitt-/Schneidkraftv S= Schnttgeschwindigkeitη Ü, η S= Wirkungsgrad der Übertragerη Sca. 0,75Drehen: f S= p S* A Smit A S= b * s Vp S= Schnittdruck[N/mm 2 ] ; A S= Spanquerschitt[mm 2 ]b = Spanbreite[mm]s V= Spanstärke/Vorschub pro Umdrehung [mm]Fräsen, Bohren: f S= z E* k S* A Smit A S= b * s Vz E= Anzahl der Schneidenk S= spezifische Schnittkraft[N/mm 2 ]Scheren: f S= k S* A Smit A S= l S* hl S= Länge der Schnittlinie[mm]h = Blechdicke[mm]Papier-, Textil- und Kunststoffbahnen mit Kalanderen (1b)=> geschwindigkeitsproportionale Viskosereibungm w= k*ω Mk = experm. Konstante[Nm s]KräfteHangabtrieb: F H= F g* sin αα = HangneigungF g= m g (g = 9,81 m/s 2 )m = nur Last<strong>2.</strong>5.3 StabilitätBeurteilung im Kennlinienfeld mit Motorkennlinie undKennlinie der ArbeitsmaschineGutes Verhalten =- kleiner Störeinfluss- schneller Einschwingvorgang- unterschiedliches Vorzeichen der Kennliniensteigungen- kein zu kleiner SchnittwinkelWirksames Beschleunigungsmoment =- Horizontaler Abstand Motorkennline ArbMaschStationäre Arbeitspunkte =- Schnittpunkte Motorkennlinie ArbMaschm a(n 0) - m w(n 0) = 0 bzw. m a(n 0) = m w(n 0)Stabilitätsbetrachtungen im näheren Umfeld des APsZeitverhalten für langsame Vorgänge:Reibkraft bei Rollen:F R= m SR/ R SReibmoment auf andere Welle: m R= F RR TStabilitätsprüfung:Stabiler AP für kleine Auslenkungen Δn:Instabiler Betriebspunkt:
zu 3.<strong>2.</strong>1 Mehrquadranten Brückengleichrichter1Q-Antrieb (I):Eine Dreh- & Momentenrichtung2Q Antrieb (I & IV):Zwei Dreh-& Eine Momentenrtg- Nur bei aktiver Last (zB Hub)4Q AntriebZwei Dreh-& Zwei Momentenrichtung- Zwei Brückengleichrichter nötig- Umkehrstromrichter in Gegenparallelschaltung- Brücke 1 (I d> 0) oder Brücke 2 (I d< 0)- Zum Kurzschlussschutz: Umschaltzeit (2 ... 5ms)zu 3.<strong>2.</strong>2 4-Quadranten-Gleichstromsteller- pro Halbbrücke nur ein Transistor geschaltenSteuerverfahren:- mit gleichzeitiger Pulsung von T1-T3 & T2-T4- je eine Diagnole leitend, eine gesperrtzu 3.<strong>2.</strong>2 PWM Steuerung einer Halbbrücke- Signalumwandlung des Steuersignals in PWM Signal=> PWM Modulator- für Analog Signale- Komparator mit Spanungssollwert und Sägezahnmit Pulsfreqz: f P= 1/T Periode=> Sollwert > Sägezahn: PWM Signal = 1- für Digitale Signale: Microcontroller- Zähler zählt bis Wert in Register PERR, ein Durchlauf= T Periodemit f = 10MHz- Pulsbreite t Edurch Inhalt des Registers PULR- Komparator: +5V wenn Counter < PULR0V wenn Counter >= PULR- Ansteuerung beider Transistoren- Mittels Treiberbaustein- Kurzschluss verhindern, Umschalttotzeit erzeugen,Hilfsspannung erzeugen die größer als Zwischenkreis-Spannungist um High Transistor einzuschalten- Kreisstrombehafteter Umkehrstromrichter- SRI im Gleichrichterbetrieb bzw. umgekehrt- SRII im Wechselrichterbetrieb bzw. umgekehrt- Durchgängiges Drehmoment (keine Pause)τ E> 50% : U aposτ E< 50% : U aneg- Vorteile: Einfach, -U Zbis +U Z abgeckt- Nachteile: Große Stromwelligkeit Δi Amaximal für τ E= 0,5:Effektivwert des überlagerten AC- C b: Wird falls Low Side Transistor geschalten aufV ccaufgeladen=> Für High Side als Hilfsspannungsquelle um GatePotential erzeugen zu können- Lückbetrieb sobald Amplitude der Stromwelligkeitgrößer als mittlerer Gleichstrom I d- L K1und L K2begrenzen Kreisstrom- Nachteile: Hoher Aufwand, zusätzliche Verluste undBlindleistungsbedarf durch Kreisstrom3.<strong>2.</strong>2 PWM - Gleichstromsteller (Selbstgeführte Stromrichter)- Bei kleinen Leistungen und hochdyn. Anforderungen- Elemente in Reihe:- Netz- Ungesteurt. Eingangsstromrichter (falls nur AC Netz)- Kondensator als Energiespeicher- Schalter zur Spannungssteuerung mit Freilaufdiode- Maschine- Steuerung mittels PWM Prinzip = konstante PeriodendauerT mit variabler Pulsbreite t E- 1Quadranten Gleichstromstellermaximaler I d(Lückstromgrenze)Aufgenommer Eingangsstrom (mit Oberschwingung)- mit alternierender Pulsung- Ansteuerung von +U Zbis Null und Null bis -U Z=> Geringere Spannungswelligkeit- Pos. Ausgangsspg: T3 dauerhaft leitend, T4 gesperrt=> Einstellung durch T1 und T2τ E= Einschaltzeit T1- Neg. Ausgangsspg: T2 dauerhaft leitend, T1 gesperrt=> Aber Schaltverluste nicht verteilt- Zur Gleichmäßigen Verteilung der Schaltverluste,wechselnde Funktion von T1-T2 und T3-T4- Hohe Pulsfrequenz > 10kHz für weniger Stromwelligkeit- Mittlere Totzeit des Stellglieds:P = U AN* I ANQ = I dEff* U ZS = √(Q 2 + P 2 )rel. Einschaltdauer des Schalters:Motorbetrieb:Generatorbetrieb:
4. FrequenzumrichterGrenzen der Gleichstrommaschine (Verlustwärme)- wegen der Wartung oder Überprüfung des Bürstenapparats,bei schlechten Zugangsmöglichkeiten- bei kleinem und begrenztem Einbauraum- längerer Betrieb mit hoher Stillstandslast=> Ersatz: Drehstromantrieb mit Frequenzumrichter4.1 Übersicht Umrichterarten4.4.<strong>1.</strong>2 Zwischenkreis- Stellt Gleichspannung für Maschinenwechselrichterzur Verfügung- Glättung durch Zwischenkreiskondensator- Einschaltstrom sehr groß=> Ladeschaltung4.4.<strong>1.</strong>3 Maschinenstromrichter (Wechselrichter)- 6 elektr. Schalter + 6 löschbare Ventile + Freilaufdiode- Schalter: Transistoren, GTOs, Thyristoren4.4.3.3 Strangstromregelung mit Sinus-Δ-Modulator- Strangstrommessung und Regelung mit PI Regler- Stellgröße Strangspannung- Einstellung mit Betragsoptimum (dyn. Kompensation)mit elektr. Zeitkonstante L/R4.4.3.4 Hysterese-Strom-Modulation (Toleranzbandregelung)- Messung der Maschinenströme und nachführung desSoll-Stroms mit möglichst geringer Abweichung Δi4.2 Direktumrichter (Bild S64)- Frequenzvariables Drehspannungssystem direkt aus50-Hz Netz über netzgeführten Stromrichter- Bei großen Leistungen, bei 15 ... 20 Hz4.3 Umrichter mit Stromzwischenkreis (I-Umrichter)- Bild S65- Zwischenkreisstrom I Zmittels B6 Brückenschaltung- Vorteile: Netzrückspeisung trotz Verwendung vonEinfachventilen (Thyristor)- Nachteile: Blockförmige Ausgangsströme => UnrundesLaufverhalten des Antriebs- Für sehr große Einzelantriebe4.4 Umrichter mit Spannungszwischenkreis (U-Umrichter)- 4 funktionale Einheiten:- Netzstromrichter (Gleichrichter)- Zwischenkreis mit Kondensator- Maschinenstromrichter- Steuer- und Controllereinheit4.4.2 Drehspannungs- und Drehfelderzeugung- Zusätzliche Änderung der Ausgangsspannung beiFrequenzvariation nötig- Grund: X = ωL => f sinkt => X sinkt=> Magnetisierungsstrom steigt, Eisen sättigt- Möglichkeiten- Variable Zwischenkreisspannung- Pulsweitenmodulation des Maschinenwechselrichters4.4.<strong>2.</strong>1 U-Umrichter mit einstellbarer Zwischenkreisspg= Block Umrichter- Steuerbarer Netzstromrichter variiert U Zgemäß f- Wechselrichter erzeugt daraus U Aim Blockbetrieb- 3 Halbbrücken werden um 120° phasenverschobenangesteuert und erzeugen Rechteckspannung U UU VU Wmit 180° Länge- Außenleiterspannungen haben 120° Länge, in SternschaltungTreppenspannung- Geeignet für Anwendungen mit geringen dynamischenAnforderungen4.4.<strong>2.</strong>2 U-Umrichter mit konstanter Zwischenkreisspg= Puls Umrichter- Gleichspannungszwischenkreis mit konstantem U Z- Ausgangsspannungssteuerung (Ampitude & Frequenz)über Motorseitigen Pulswechselrichter- Zweipunktregler mit Vorgabe eines Toleranzbands- Nachteilig: Veränderliche Pulsfrequenz mit breitemOberschwingungsspektrum4.4.4.1 NetzstromrichterKriterien- konstante oder einstellbare Zwischenkreisspannung- Rückspeisefähigkeit (ja / nein)Konstante Zwischenkreisspannung:Einstellbare Zwischenkreisspannung- Geeignet für dynamisch hochwertige Stellantriebe- U Z(motorbetrieb) ca. 600V, im Bremsbetrieb mehrbegrenzt durch Bremschoppers (R B)- Für Netzrückspeisung: Zusätzliche Transistoren imNetz-Stromrichter- Erzeugt sinusförmige Netzströme mit wenig Oberschwingungsgehaltund Phasenwinkel 0° bis 180°4.4.3 Pulsverfahren bei U-Umrichtern- Unterscheidung nach einzustellende Größe:Strangspannungen Strangströme- Verfahren: Sinusbewertete Pulsweitenmodulation oderRaumzeigermodulation4.4.3.1 Sinus-Δ-Modulation (Strangspg)- Vergleich dreiphasige sinusförmioge Sollwertspannungssystemmit Dreieck oder Sägezahnfunktion mitPulsfrequenz f P- Welligkeit des Ausgangsstrom- Nachteil: Geringe Spannungsausnutzung (EffektivwertGrundschwingung 0,61 U Z)4.4.3.2Raum-Zeiger-Modulation (RZM, SZM) (Strangspg)- Beschreibung des 3-phasen Systems als Raumzeiger- Spannungsraumzeiger U sollwird ruch pulsen möglichstgut angenähert- Geringe Oberschwingungen, geringe Verluste- Sehr gut geeignet für digitale Steuerungen
5. Frequenzsteuerung der ASM5.<strong>1.</strong>1 <strong>Einführung</strong>- synchrone Drehzahl=> zur Drehzahlverstellung Statorspg U 1ändern- Ersatzschaltbild ASM5.<strong>1.</strong>3 Erweiterung des Spannungs-Stellbereichs- Bei fester Frequenz: U Nbei Sättigungsgrenze- Erhöhte Frequenz: Spannungen höher als U Nmöglich- Leistung und Drehmoment steigen hier mit Frequenzzu 6.<strong>2.</strong>2- Induzierte Spannugn in den Statorspulen entspricht derFlussdichteverteilung an der Rotoroberfläche, Amplitudeproportional zur Drehzahl- Phasenlagenversetzung der 3 Strangspannungen:- Induzierte Strangspannung- Ziel aller Verfahren: Fluss in bestimmten Frequenzbereichkonstant haltenEinschub: ASM5.<strong>1.</strong>4 Normierte Kennlinien zur DrehzahlsteuerungLinearer Teil der Motorkennlinie:f(...) = Kurvenform des FlussdichteverlaufsSinus Kurvenform:exakt Rechteckförmig:Grunddrehzahlbereich (konstanter Fluss)6.<strong>2.</strong>3 Einsträngiges Ersatzschaltbild, Leistungsbilanz undDrehmomentDrehmoment (Dauerbetrieb): m * Mgrenz = φ* = 1 / f * 1Feldschwächbereich (konstante Nennspg u 1*= 1)Bei Feldschwächung:p* = m* maxn* = const=> m Mgrenz= (1-s n) / n*Sonstiges- Spindelgeschwindigkeit v = n SPh SPU i(ϑ el...) gemäß 6.<strong>2.</strong>2- Zugeführte Wirkleistung: P el(t) = u 1(t) * i 1(t)- Innere Leistung: P i(t) = P el(t) - P v(t) = u i(t) * i 1(t)= Mechanische Leistung: P mech(t) = P i(t) = ω M(t) m Str(t)- Beitrag eines Wicklungsstrangs zum Motormonent5.<strong>1.</strong>2 Verfahren 1: U/f Kennliniensteuerung- Ziel: ASM arbeit bei Nennfluss nahe Sättigungsgrenzebzw. Magnetisierungsstrom I µbei konst. Nennwert- Nennfluss = Bester Wirkungsgrad- Anheben von U 1im unteren Frequenzbereich aufΔU 1= I 0R 1um I µbei konst. Nennwert zu halten( = Boost bzw. I 1/R 1-Korrektur), blaue Linie mit Boost- Betriebsbereiche:<strong>1.</strong>) Spannungsstellbereich=> U 1~ f steuern<strong>2.</strong>) Feldstellsbereich=> U 1maximal, Magnetisierungsstrom sinkt6.Antriebe mit elektron Kommutierung6.1 Aufbau und Klassifizierung- Innenpol Syncronmaschine mit Permanenterregung- Anker im Stator, Läufer trägt Magnetsystem- Läuferlagegeber steuert Lageinformation an den speisenenStromrichter zur Kommutierung der Statorströme- Vorteile: Gute Wärmeabführ im Ständer, hohe Drehzahlgrenze,günstige Maschinenfertigung- Vorteile durch Wegfall des Kommutators: hohekurzzeitige Überlastfähigkeit, hohe Zuverlässigkeit,Wartungsarbeiten einfacher, kein Kühler nötig- Klassen:<strong>1.</strong>) Antriebe mit blockförmigen Strangströmen= EC-Motor, bürstenloser GS-Motor<strong>2.</strong>) Antriebe mit sinusförmigen Strangströmen= Syncron-Servomotor, AC-Servo6.2 Strang-Modell eines elektronisch kommutierten Syncromotors6.<strong>2.</strong>1 Aufbau6.<strong>2.</strong>4 Strangmodell und Motormodell- Seite 88-89 mit sinusförigem Feldverlauf- Motormodell = 3*Strangmodell * Newtonsche Bewegungsgleichung6.3 Bürstenloser Gleichstrommotor mit Blockkomutierung6.3.1 Blockkommutierung mit Hall-Sensoren- Entspricht bürstenlosem GStrAntrieb mit elektronischerstatt mechanischer Kommutierung6.3.2 Systemgleichungen und Ersatzschaltbildind. Spannung:Scheitelwert:Innere Leistung:Drehmoment:Ersatzschaltbild:p = Polpaarzahlm = Strangzahl (meist 3)p*m = Anzahl derSpulen im StatorDifferentialgleichungen (==GSTr-Nebenschluss-Maschine)6.<strong>2.</strong>2 Feldverlauf (Flussdichteverteilung)- Blockförmiger oder sinusförmige Flussdichteverteilungje nach Form der StrangströmeNachteil: Ripple im Drehmoment durch nicht ideal rechteckförmigeStrangströme=> Abhilfe: Sinuskommutierung