1. Einführung 2. Bewegungsvorgänge Anlauf - EIT Board
1. Einführung 2. Bewegungsvorgänge Anlauf - EIT Board
1. Einführung 2. Bewegungsvorgänge Anlauf - EIT Board

Sie wollen auch ein ePaper? Erhöhen Sie die Reichweite Ihrer Titel.
YUMPU macht aus Druck-PDFs automatisch weboptimierte ePaper, die Google liebt.
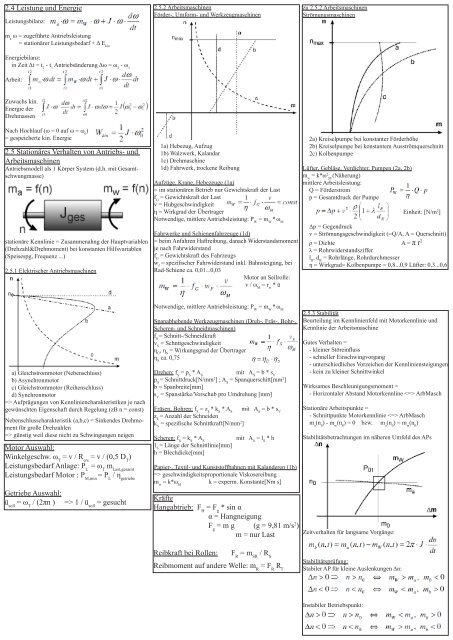
<strong>2.</strong>4 Leistung und EnergieLeistungsbilanz:m aω = zugeführte Antriebsleistung= stationärer Leistungsbedarf + Δ E kinEnergiebilanz:in Zeit Δt = t 2- t 1Antriebsänderung Δω = ω 2- ω 1Arbeit:<strong>2.</strong>5.2 ArbeitsmaschinenFörder-, Umform- und Werkzeugmaschinenzu <strong>2.</strong>5.2 ArbeitsmaschinenStrömungsmaschinenZuwachs kin.Energie derDrehmassenNach Hochlauf (ω = 0 auf ω = ω 0)= gespeicherte kin. Energie<strong>2.</strong>5 Stationäres Verhalten von Antriebs- undArbeitsmaschinenAntriebsmodell als 1 Körper System (d.h. mit Gesamtschwungmasse)stationäre Kennlinie = Zusammenahng der Hauptvariablen(Drehzahl&Drehmoment) bei konstanten Hilfsvariablen(Speisespg, Frequenz ...)<strong>2.</strong>5.1 Elektrischer Antriebsmaschinen1a) Hebezug, Aufzug1b) Walzwerk, Kalandar1c) Drehmaschine1d) Fahrwerk, trockene ReibungAufzüge, Krane, Hebezeuge (1a)= im stationären Betrieb nur Gewichtskraft der Lastf G= Gewichtskraft der Lastv = Hubgeschwindigkeitη = Wirkgrad der ÜbertragerNotwendige, mittlere Antriebsleistung: P W= m W* ω MFahrwerke und Schienenfahrzeuge (1d)= beim Anfahren Haftreibung, danach Widerstandsmomentje nach Fahrwiderstandf G= Gewichtskraft des Fahrzeugsw f= spezifischer Fahrwiderstand inkl. Bahnsteigung, beiRad-Schiene ca. 0,0<strong>1.</strong>..0,03Motor an Seilrolle:v / ω M= r st* ü2a) Kreiselpumpe bei konstanter Förderhöhe2b) Kreiselpumpe bei konstantem Ausströmquerschnitt2c) KolbenpumpeLüfter, Gebläse, Verdichter, Pumpen (2a, 2b)m w= k*ω 2 M (Näherung)mittlere Arbeitsleistung:Q = Förderstromp = Gesamtdruck der PumpeEinheit: [N/m 2 ]Δp = Gegendruckv = Strömungsgeschwindigkeit (=Q/A, A = Querschnitt)ρ = Dichte A = π r 2λ = Rohrwiderstandszifferl R, d R= Rohrlänge, Rohrdurchmesserη = Wirkgrad= Kolbenpumpe = 0,8...0,9 Lüfter: 0,3...0,6a) Gleichstrommotor (Nebenschluss)b) Asynchronmotorc) Gleichstrommotor (Reihenschluss)d) Synchronmotor=> Aufprägungen von Kennliniencharakteristiken je nachgewünschten Eigenschaft durch Regelung (zB n = const)Nebenschlusscharakteristik (a,b,c) = Sinkendes Drehmomentfür große Drehzahlen=> günstig weil diese nicht zu Schwingungen neigenMotor Auswahl:Winkelgeschw. ω T= v / R ers= v / (0,5 D T)Leistungsbedarf Anlage: P L= ω Tm Last,gesamtLeistungsbedarf Motor : P M,min= P L/ η getriebeGetriebe Auswahl:ü soll= ω T/ (2πn )=> 1 / ü soll= gesuchtNotwendige, mittlere Antriebsleistung: P W= m W* ω MSpanabhebende Werkzeugmaschinen (Dreh-, Fräs-, Bohr-,Scheren- und Schneidmaschinen)f S= Schnitt-/Schneidkraftv S= Schnttgeschwindigkeitη Ü, η S= Wirkungsgrad der Übertragerη Sca. 0,75Drehen: f S= p S* A Smit A S= b * s Vp S= Schnittdruck[N/mm 2 ] ; A S= Spanquerschitt[mm 2 ]b = Spanbreite[mm]s V= Spanstärke/Vorschub pro Umdrehung [mm]Fräsen, Bohren: f S= z E* k S* A Smit A S= b * s Vz E= Anzahl der Schneidenk S= spezifische Schnittkraft[N/mm 2 ]Scheren: f S= k S* A Smit A S= l S* hl S= Länge der Schnittlinie[mm]h = Blechdicke[mm]Papier-, Textil- und Kunststoffbahnen mit Kalanderen (1b)=> geschwindigkeitsproportionale Viskosereibungm w= k*ω Mk = experm. Konstante[Nm s]KräfteHangabtrieb: F H= F g* sin αα = HangneigungF g= m g (g = 9,81 m/s 2 )m = nur Last<strong>2.</strong>5.3 StabilitätBeurteilung im Kennlinienfeld mit Motorkennlinie undKennlinie der ArbeitsmaschineGutes Verhalten =- kleiner Störeinfluss- schneller Einschwingvorgang- unterschiedliches Vorzeichen der Kennliniensteigungen- kein zu kleiner SchnittwinkelWirksames Beschleunigungsmoment =- Horizontaler Abstand Motorkennline ArbMaschStationäre Arbeitspunkte =- Schnittpunkte Motorkennlinie ArbMaschm a(n 0) - m w(n 0) = 0 bzw. m a(n 0) = m w(n 0)Stabilitätsbetrachtungen im näheren Umfeld des APsZeitverhalten für langsame Vorgänge:Reibkraft bei Rollen:F R= m SR/ R SReibmoment auf andere Welle: m R= F RR TStabilitätsprüfung:Stabiler AP für kleine Auslenkungen Δn:Instabiler Betriebspunkt: