1. Einführung 2. Bewegungsvorgänge Anlauf - EIT Board
1. Einführung 2. Bewegungsvorgänge Anlauf - EIT Board
1. Einführung 2. Bewegungsvorgänge Anlauf - EIT Board

Sie wollen auch ein ePaper? Erhöhen Sie die Reichweite Ihrer Titel.
YUMPU macht aus Druck-PDFs automatisch weboptimierte ePaper, die Google liebt.
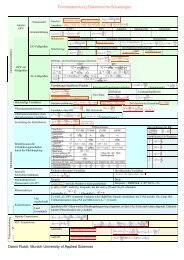
5. Frequenzsteuerung der ASM5.<strong>1.</strong>1 <strong>Einführung</strong>- synchrone Drehzahl=> zur Drehzahlverstellung Statorspg U 1ändern- Ersatzschaltbild ASM5.<strong>1.</strong>3 Erweiterung des Spannungs-Stellbereichs- Bei fester Frequenz: U Nbei Sättigungsgrenze- Erhöhte Frequenz: Spannungen höher als U Nmöglich- Leistung und Drehmoment steigen hier mit Frequenzzu 6.<strong>2.</strong>2- Induzierte Spannugn in den Statorspulen entspricht derFlussdichteverteilung an der Rotoroberfläche, Amplitudeproportional zur Drehzahl- Phasenlagenversetzung der 3 Strangspannungen:- Induzierte Strangspannung- Ziel aller Verfahren: Fluss in bestimmten Frequenzbereichkonstant haltenEinschub: ASM5.<strong>1.</strong>4 Normierte Kennlinien zur DrehzahlsteuerungLinearer Teil der Motorkennlinie:f(...) = Kurvenform des FlussdichteverlaufsSinus Kurvenform:exakt Rechteckförmig:Grunddrehzahlbereich (konstanter Fluss)6.<strong>2.</strong>3 Einsträngiges Ersatzschaltbild, Leistungsbilanz undDrehmomentDrehmoment (Dauerbetrieb): m * Mgrenz = φ* = 1 / f * 1Feldschwächbereich (konstante Nennspg u 1*= 1)Bei Feldschwächung:p* = m* maxn* = const=> m Mgrenz= (1-s n) / n*Sonstiges- Spindelgeschwindigkeit v = n SPh SPU i(ϑ el...) gemäß 6.<strong>2.</strong>2- Zugeführte Wirkleistung: P el(t) = u 1(t) * i 1(t)- Innere Leistung: P i(t) = P el(t) - P v(t) = u i(t) * i 1(t)= Mechanische Leistung: P mech(t) = P i(t) = ω M(t) m Str(t)- Beitrag eines Wicklungsstrangs zum Motormonent5.<strong>1.</strong>2 Verfahren 1: U/f Kennliniensteuerung- Ziel: ASM arbeit bei Nennfluss nahe Sättigungsgrenzebzw. Magnetisierungsstrom I µbei konst. Nennwert- Nennfluss = Bester Wirkungsgrad- Anheben von U 1im unteren Frequenzbereich aufΔU 1= I 0R 1um I µbei konst. Nennwert zu halten( = Boost bzw. I 1/R 1-Korrektur), blaue Linie mit Boost- Betriebsbereiche:<strong>1.</strong>) Spannungsstellbereich=> U 1~ f steuern<strong>2.</strong>) Feldstellsbereich=> U 1maximal, Magnetisierungsstrom sinkt6.Antriebe mit elektron Kommutierung6.1 Aufbau und Klassifizierung- Innenpol Syncronmaschine mit Permanenterregung- Anker im Stator, Läufer trägt Magnetsystem- Läuferlagegeber steuert Lageinformation an den speisenenStromrichter zur Kommutierung der Statorströme- Vorteile: Gute Wärmeabführ im Ständer, hohe Drehzahlgrenze,günstige Maschinenfertigung- Vorteile durch Wegfall des Kommutators: hohekurzzeitige Überlastfähigkeit, hohe Zuverlässigkeit,Wartungsarbeiten einfacher, kein Kühler nötig- Klassen:<strong>1.</strong>) Antriebe mit blockförmigen Strangströmen= EC-Motor, bürstenloser GS-Motor<strong>2.</strong>) Antriebe mit sinusförmigen Strangströmen= Syncron-Servomotor, AC-Servo6.2 Strang-Modell eines elektronisch kommutierten Syncromotors6.<strong>2.</strong>1 Aufbau6.<strong>2.</strong>4 Strangmodell und Motormodell- Seite 88-89 mit sinusförigem Feldverlauf- Motormodell = 3*Strangmodell * Newtonsche Bewegungsgleichung6.3 Bürstenloser Gleichstrommotor mit Blockkomutierung6.3.1 Blockkommutierung mit Hall-Sensoren- Entspricht bürstenlosem GStrAntrieb mit elektronischerstatt mechanischer Kommutierung6.3.2 Systemgleichungen und Ersatzschaltbildind. Spannung:Scheitelwert:Innere Leistung:Drehmoment:Ersatzschaltbild:p = Polpaarzahlm = Strangzahl (meist 3)p*m = Anzahl derSpulen im StatorDifferentialgleichungen (==GSTr-Nebenschluss-Maschine)6.<strong>2.</strong>2 Feldverlauf (Flussdichteverteilung)- Blockförmiger oder sinusförmige Flussdichteverteilungje nach Form der StrangströmeNachteil: Ripple im Drehmoment durch nicht ideal rechteckförmigeStrangströme=> Abhilfe: Sinuskommutierung