Kleine Zeitreise durch die Robotik - Caucau.ch
Kleine Zeitreise durch die Robotik - Caucau.ch
Kleine Zeitreise durch die Robotik - Caucau.ch

Sie wollen auch ein ePaper? Erhöhen Sie die Reichweite Ihrer Titel.
YUMPU macht aus Druck-PDFs automatisch weboptimierte ePaper, die Google liebt.
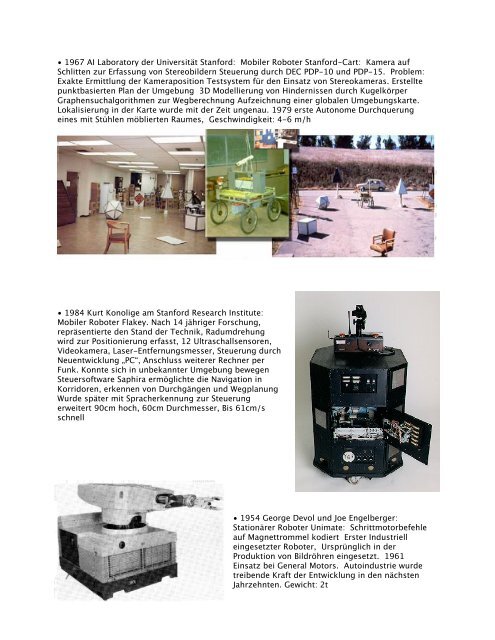
• 1967 AI Laboratory der Universität Stanford: Mobiler Roboter Stanford-Cart: Kamera aufS<strong>ch</strong>litten zur Erfassung von Stereobildern Steuerung <strong>dur<strong>ch</strong></strong> DEC PDP-10 und PDP-15. Problem:Exakte Ermittlung der Kameraposition Testsystem für den Einsatz von Stereokameras. Erstelltepunktbasierten Plan der Umgebung 3D Modellierung von Hindernissen <strong>dur<strong>ch</strong></strong> KugelkörperGraphensu<strong>ch</strong>algorithmen zur Wegbere<strong>ch</strong>nung Aufzei<strong>ch</strong>nung einer globalen Umgebungskarte.Lokalisierung in der Karte wurde mit der Zeit ungenau. 1979 erste Autonome Dur<strong>ch</strong>querungeines mit Stühlen möblierten Raumes, Ges<strong>ch</strong>windigkeit: 4-6 m/h• 1984 Kurt Konolige am Stanford Resear<strong>ch</strong> Institute:Mobiler Roboter Flakey. Na<strong>ch</strong> 14 jähriger Fors<strong>ch</strong>ung,repräsentierte den Stand der Te<strong>ch</strong>nik, Radumdrehungwird zur Positionierung erfasst, 12 Ultras<strong>ch</strong>allsensoren,Videokamera, Laser-Entfernungsmesser, Steuerung <strong>dur<strong>ch</strong></strong>Neuentwicklung „PC“, Ans<strong>ch</strong>luss weiterer Re<strong>ch</strong>ner perFunk. Konnte si<strong>ch</strong> in unbekannter Umgebung bewegenSteuersoftware Saphira ermögli<strong>ch</strong>te <strong>die</strong> Navigation inKorridoren, erkennen von Dur<strong>ch</strong>gängen und WegplanungWurde später mit Spra<strong>ch</strong>erkennung zur Steuerungerweitert 90cm ho<strong>ch</strong>, 60cm Dur<strong>ch</strong>messer, Bis 61cm/ss<strong>ch</strong>nell• 1954 George Devol und Joe Engelberger:Stationärer Roboter Unimate: S<strong>ch</strong>rittmotorbefehleauf Magnettrommel ko<strong>die</strong>rt Erster Industrielleingesetzter Roboter, Ursprüngli<strong>ch</strong> in derProduktion von Bildröhren eingesetzt. 1961Einsatz bei General Motors. Autoindustrie wurdetreibende Kraft der Entwicklung in den nä<strong>ch</strong>stenJahrzehnten. Gewi<strong>ch</strong>t: 2t