

B C D a a a x y a I II III IV a/2 E Reines Rollen A a ...
B C D a a a x y a I II III IV a/2 E Reines Rollen A a ...
B C D a a a x y a I II III IV a/2 E Reines Rollen A a ...

Sie wollen auch ein ePaper? Erhöhen Sie die Reichweite Ihrer Titel.
YUMPU macht aus Druck-PDFs automatisch weboptimierte ePaper, die Google liebt.
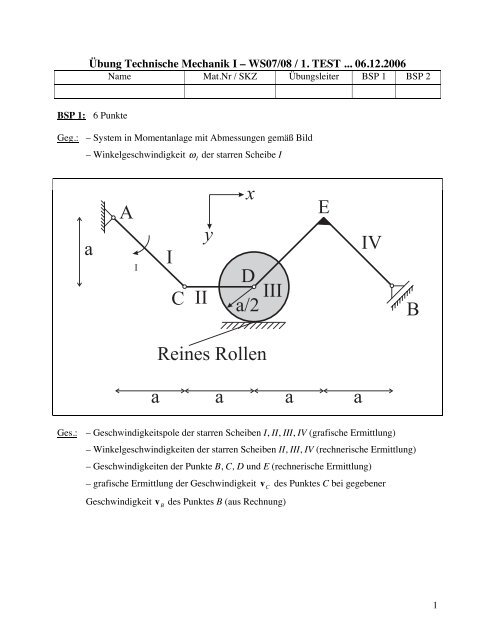
Übung Technische Mechanik I – WS07/08 / 1. TEST ... 06.12.2006Name Mat.Nr / SKZ Übungsleiter BSP 1 BSP 2BSP 1: 6 PunkteGeg.: – System in Momentanlage mit Abmessungen gemäß Bild– Winkelgeschwindigkeit ! Ider starren Scheibe IaA<strong>II</strong>C<strong>II</strong>yxDa/2<strong>II</strong>IE<strong>IV</strong>B<strong>Reines</strong> <strong>Rollen</strong>aaaaGes.: – Geschwindigkeitspole der starren Scheiben I, <strong>II</strong>, <strong>II</strong>I, <strong>IV</strong> (grafische Ermittlung)– Winkelgeschwindigkeiten der starren Scheiben <strong>II</strong>, <strong>II</strong>I, <strong>IV</strong> (rechnerische Ermittlung)– Geschwindigkeiten der Punkte B, C, D und E (rechnerische Ermittlung)– grafische Ermittlung der Geschwindigkeit v Cdes Punktes C bei gegebenerGeschwindigkeit v Bdes Punktes B (aus Rechnung)1
BSP 2: 6 PunkteGeg.: – System mit Abmessungen gemäß BildLe xe ae !!e ye y= e !e !A!(t) e y= e !e ze !P!(t)Ges.: – Absolutgeschwindigkeit v pund Absolutbeschleunigung a pdes Punktes P dargestelltim Fuehrungssystem.HINWEISVerwenden sie zur Berechnung das eingezeichnete Fuehrungssystem, dessenWinkelgeschwindigkeitsvektor ! = ! * = # 0 " !$ 0 %&Tist.2




