Datenverarbeitung im Kraftfahrzeug - BiBB
Datenverarbeitung im Kraftfahrzeug - BiBB
Datenverarbeitung im Kraftfahrzeug - BiBB

Erfolgreiche ePaper selbst erstellen
Machen Sie aus Ihren PDF Publikationen ein blätterbares Flipbook mit unserer einzigartigen Google optimierten e-Paper Software.
<strong>Datenverarbeitung</strong> <strong>im</strong> <strong>Kraftfahrzeug</strong> –<br />
Anforderungen • Systeme • Beispiele<br />
Martin Burgmer/Andreas Ehritt<br />
Inhaltsübersicht<br />
1 Einleitung<br />
1.1 Warum wird <strong>Datenverarbeitung</strong> <strong>im</strong> Fahrzeug erforderlich?<br />
1.2 Vorteile von Bussystemen <strong>im</strong> <strong>Kraftfahrzeug</strong><br />
2 Klassifi kation von Bussystemen<br />
3 Merkmale von Bussystemen <strong>im</strong> <strong>Kraftfahrzeug</strong><br />
3.1 Der CAN-Bus<br />
3.1.1 Adressierung und Priorisierung<br />
3.1.2 Störungserkennung und ihre Behandlung<br />
3.1.3 Standardisierung<br />
3.1.4 Anwendungsbeispiel Echtzeit<br />
3.1.5 Zusammenfassung der Merkmale der CAN-Bussysteme<br />
3.2 Der LIN-Bus<br />
3.3 Optische Datenbusse<br />
3.3.1 Merkmale optischer Bussysteme<br />
3.3.2 Der D2B<br />
3.3.3 Der MOST-Bus<br />
3.3.4 Anwendungsbeispiel<br />
3.4 Die Bluetooth-Technologie <strong>im</strong> <strong>Kraftfahrzeug</strong><br />
4 Zusammenfassung<br />
5 Schrifttum<br />
1. Einleitung<br />
1.1 Warum wird <strong>Datenverarbeitung</strong> <strong>im</strong> Fahrzeug erforderlich?<br />
06_2_03.pdf<br />
Berufsbildung für eine globale Gesellschaft<br />
Perspektiven <strong>im</strong> 21. Jahrhundert<br />
Kein Zweifel: die Entwicklung <strong>im</strong> Automobilbau hat sich in den letzten zwanzig Jahren tiefgreifend<br />
gewandelt. Zunächst beschränkte sich das Entwicklungspotential weitgehend auf Designmerkmale<br />
und die Optik des Fahrzeugs; dies änderte sich jedoch sprungartig mit der Einführung<br />
der Elektronik <strong>im</strong> <strong>Kraftfahrzeug</strong>.<br />
So führte zum Beispiel bei den aktiven Sicherheitssystemen das ABS <strong>im</strong> Jahre 1978 zu einem<br />
entscheidenden Sicherheitsgewinn. Aus den Erkenntnissen der ABS-Entwicklung ging 1995<br />
das Elektronische Stabilitäts Programm, ESP, hervor, das bereits aktiv in die Fahrdynamik des<br />
Fahrzeugs eingreift. Bei den passiven Sicherheitssystemen folgte 1981 nach den mechanischen<br />
Rückhaltesystemen die Einführung von elektronisch gesteuerten Airbags und Gurtstraff ern.<br />
Jedes dieser Systeme wurde - wenngleich auch mit den notwendigen funktionalen Verknüpfungen<br />
zu benachbarten Systemen - kontinuierlich weiterentwickelt, jedoch <strong>im</strong> Wesentlichen innerhalb<br />
seiner Systemgrenzen. Die konsequente Erweiterung der Sichtweise vom Einzelsystem hin<br />
zu einem ganzheitlichen Vernetzungsansatz zeitigte einen weiteren Technologiesprung.<br />
Dokumentation 4. BIBB-Fachkongress 2002
– 2 –<br />
Bild 1: Technologiesprünge, Beispiel Bremse; Quelle: Continental<br />
06_2_03.pdf<br />
Berufsbildung für eine globale Gesellschaft<br />
Perspektiven <strong>im</strong> 21. Jahrhundert<br />
Ein Beispiel für die Umsetzung eines ganzheitlichen Vernetzungsansatzes ist das unter dem<br />
Namen „30m Auto“ bekannt gewordene Projekt der Firma Continental, das den Bremsweg eines<br />
Kompaktklassefahrzeugs von heute über 40m auf rund 30m reduziert.<br />
Bild 2: 30m-Auto; Komponenten und ihre Vernetzung; Quelle: Continental<br />
Dokumentation 4. BIBB-Fachkongress 2002
– 3 –<br />
Berufsbildung für eine globale Gesellschaft<br />
Perspektiven <strong>im</strong> 21. Jahrhundert<br />
Diese beeindruckende Bremswegverkürzungen wurde zu je einem Drittel durch Reifentechnologie,<br />
Bremsentechnologie und Vernetzung erreicht. Ziel dieser Anstrengungen ist die Vernetzung<br />
der gesamten Fahrwerks-Subsysteme zu einem global kommunizierenden Systemverbund. Damit<br />
gewinnt das Fahrzeug an Fahrdynamik und Sicherheitspotenzial.<br />
Die Ausstattung heute angebotener Fahrzeuge aller Fahrzeugklassen und in allen Märkten liegt<br />
in der Regel deutlich über der Grundfunktionalität eines <strong>Kraftfahrzeug</strong>s. Bei den meisten Zusatzfunktionen<br />
ist der Hardwareaufwand, <strong>im</strong> wesentlichen für Sensoren und Aktoren, <strong>im</strong> Vergleich<br />
zur Grundfunktionalität gering. Der weitaus größte Teil des Aufwands für Zusatzfunktionalitäten<br />
entfällt zum einen auf Elektronik und Software, begründet durch Funktionen, die aus der erweiterten<br />
Steuerungs- und Regelungstechnik für bestehende Systeme abgeleitet sind, zum anderen<br />
durch Funktionen, die aus der Verknüpfung bestehender Systeme hervorgehen. Die Liste solcher<br />
zusätzlicher Funktionen ist lang.<br />
Während die Systemgrenze bei den bisherigen Betrachtungen sozusagen die Außenhaut des<br />
Fahrzeugs darstellte (on-board-Vernetzung), erweitern wir nun kurzzeitig die Systemgrenze und<br />
nehmen das Verkehrsgeschehen insgesamt in den Blick (off -board-Vernetzung).<br />
Dabei ist off ensichtlich, dass wir es mit einer Vielzahl von Akteuren, wie Fahrern und Verkehrsteilnehmern,<br />
von Sachsystemen, wie Fahrzeugen, Anlagen zur Verkehrsbeeinfl ussung und -kontrolle,<br />
von Zielsetzungen, Rahmenbedingungen und Zuständen der Verkehrsumgebung zu tun<br />
haben, deren intelligente Vernetzung unter den verschiedensten gesellschaftlichen Anforderungen<br />
erfolgen kann, wie z. B. Unfall-, Schadstoff - und Verbrauchsmin<strong>im</strong>ierung.<br />
Bild 3: Unfallmin<strong>im</strong>ierung durch Fahrerassistenz; Quelle: MAN<br />
06_2_03.pdf<br />
Dokumentation 4. BIBB-Fachkongress 2002
– 4 –<br />
Innerhalb kurzer Zeit<br />
mehrere ähnliche Meldungen<br />
Verkehr gestaut!<br />
06_2_03.pdf<br />
Leitrechner<br />
der DDG<br />
Mobilfunknetz<br />
(GSM)<br />
Stauende<br />
Berufsbildung für eine globale Gesellschaft<br />
Perspektiven <strong>im</strong> 21. Jahrhundert<br />
Zu den Forschungs- und Entwicklungsschwerpunkten innerhalb dieses enorm weiten Feldes der<br />
off -board-Vernetzung mit ihrer ganzheitlichen Betrachtung des Verkehrsgeschehens gehören<br />
Fahrerassistenz- und Telematiksysteme; vergleiche die Bilder 3 und 4. Erste Anwendungen befi nden<br />
sich bereits in der Serie.<br />
Die Zunahme von Funktionalität und Varianten führt dazu, dass die Komplexität eines Fahrzeugs<br />
prinzipiell wächst, während sich gleichzeitig die Integrationskomplexität von Komponenten<br />
auch unterschiedlicher Hersteller von der Mechanik zur Mechatronik verlagert. War in der Vergangenheit<br />
<strong>im</strong> wesentlichen mechanische Passgenauigkeit gefragt, so ist in Zukunft zusätzlich<br />
das funktionale und logische Zusammenspiel von Elektronik und Software erfolgsbest<strong>im</strong>mend.<br />
2.2 Vorteile von Bussystemen <strong>im</strong> <strong>Kraftfahrzeug</strong><br />
FCD<br />
per SMS<br />
Bild 4: Unfallmin<strong>im</strong>ierung durch Telematik<br />
Navigationssatelliten<br />
(GPS)<br />
Positionsbest<strong>im</strong>mung<br />
Plötzliche Verminderung<br />
der Geschwindigkeit<br />
auf der Autobahn<br />
Schlüssel für die Beherrschung und Reduzierung der Komplexität sind modulare Systeme, die<br />
miteinander auf logisch und physikalisch standardisierte Weise kommunizieren. Dies setzt eine<br />
konsequente modulare Aufteilung der Fahrzeugfunktionen und eine entsprechende Architektur<br />
von Hard-und Software voraus. Entsprechende Ansätze sind weltweit erkennbar. Plattformen für<br />
die Hardware sowohl <strong>im</strong> Bereich der Mechanik als auch der Elektronik existieren oder sind in<br />
Vorbereitung. Bereits heute verbinden standardisierte Bussysteme, die in der Mächtigkeit an die<br />
Bedürfnisse des jeweiligen Funktionsbereichs wie Cockpit oder Karosserie angepasst sind, die<br />
Teilsysteme.<br />
Eine herkömmliche Datenübertragung mittels einzeln zugeordneter Signalleitungen stößt<br />
dabei an die Grenzen des Machbaren, weil einerseits der Umfang des Kabelbaums kaum noch<br />
handhabbar ist und andererseits die begrenzte Pinzahl der Stecker mehr und mehr zum l<strong>im</strong>itierenden<br />
Faktor der Steuergeräteentwicklung wird. Die Lösung dieser Aufgabenstellung liegt -<br />
neben der Weiterentwicklung entsprechender Systemkomponenten - in einem leistungsfähigen<br />
Kommunikationssystem mit einem automobilgerechten und kostengünstigen Netzwerk. Dieses<br />
Kommunikationssystem muß eine schnelle und zuverlässige Übertragung gewährleisten – auch<br />
bei größeren Entfernungen und in einer von elektromagnetischen Störungen beeinfl ußten Umgebung.<br />
Mit steigender Anzahl von Sensoren und Aktoren steigt auch die Zahl der Steuergeräte und damit<br />
die Komplexität. Konventionell verdrahtet hat ein gut ausgestattetes Mittelklassefahrzeug<br />
heute bereits über 1000 Verbindungen mit mehr als 1000 m Leitungen und entsprechend vielen<br />
Steckverbindungen. Eingebunden in ein Bussystem, wie z.B. CAN, tauschen alle angeschlossenen<br />
Systeme ihre Informationen über nur eine logische Leitung aus. Hierzu zeigt das folgende<br />
Bild ein Beispiel.<br />
Dokumentation 4. BIBB-Fachkongress 2002
– 5 –<br />
Konventionell<br />
Max. 45 Leitungen<br />
9 Stecker<br />
60 Leitungsvarianten<br />
Mit CAN-Bus<br />
P 58 re<br />
58 li<br />
58<br />
E 2<br />
06_2_03.pdf<br />
S<br />
M2 M3 M1 M4 X<br />
S S<br />
58<br />
E 1<br />
58 re 58 li<br />
58 58li<br />
D<br />
P<br />
J 218<br />
58re<br />
Blinker links<br />
Blinker rechts<br />
Berufsbildung für eine globale Gesellschaft<br />
Perspektiven <strong>im</strong> 21. Jahrhundert<br />
Bussysteme erlauben einer Vielzahl von Steuergeräten, Informationen über gemeinsam verwendete<br />
Leitungen auszutauschen. Dabei sind folgende Vorteile für den Einsatz <strong>im</strong> <strong>Kraftfahrzeug</strong><br />
von Bedeutung:<br />
l Die benötigte Verkabelung zwischen allen angeschlossenen Steuergeräten ist innerhalb des<br />
Busses einheitlich (meist eine verdrillte Zweidrahtleitung).<br />
l Selbst ein hoher Vernetzungsgrad zwischen den Steuergeräten erfordert keine zusätzlichen<br />
Leitungen, solange der mögliche Gesamtdatendurchsatz auf dem Bus nicht überschritten und<br />
das geforderte Echzeitverhalten nicht unterschritten werden. Das Echtzeitverhalten wird best<strong>im</strong>mt<br />
durch die max<strong>im</strong>al erlaubten Zeitverzögerungen bei der Informationsübertragung.<br />
l Eine Vernetzung erlaubt die Realisierung komplexer Steuerungsfunktionen, die mit konventioneller<br />
Verkabelung nicht mehr zu vertretbaren Kosten erzielt werden könnte.<br />
l Der Informationsaustausch von Nutzdaten kann während des Produktionszyklus innerhalb<br />
gewisser Grenzen ergänzt oder variiert werden, ohne daß sich die Veränderungen auf die<br />
Verkabelung auswirken. Dies ermöglicht eine kostengünstige Produktdiversifi kation und<br />
–weiterentwicklung.<br />
l Informationen können in Bussystemen digital (also als Zahlenwert) übertragen werden.<br />
l Viele Steuergeräte sind microprozessorgesteuert und verarbeiten digitale Eingangsgrößen.<br />
Ein direkter digitaler Datenaustausch ermöglicht die Einsparung von Analog/Digital-Wandlern;<br />
damit werden auch die mit der Umwandlung von digitaler in eine analoge Darstellung<br />
verbundenen Wandlungsfehler vermieden.<br />
•l Digitale Übertragungsverfahren ermöglichen die Erkennung und Korrektur von Übertragungsfehlern,<br />
so daß auf dem Übertragungsweg verfälschte Daten automatisch verworfen<br />
werden können.<br />
M2 M3<br />
D<br />
P<br />
J 527<br />
J 519<br />
Max. 17 Leitungen<br />
2 Stecker<br />
2 Leitungsvarianten<br />
M1 M4<br />
X<br />
J 285<br />
58<br />
E 1<br />
Quelle: Audi AG<br />
Bild 5: Vergleich zwischen konventioneller Verkabelung und CAN-Bus-Verkabelung,<br />
Beispiel Blinker <strong>im</strong> Audi A4; links: A4 bis Mj 2001, rechts: A4 ab Mj 2001<br />
Dokumentation 4. BIBB-Fachkongress 2002
– 6 –<br />
2. Klassifi zierung von Bussystemen <strong>im</strong> <strong>Kraftfahrzeug</strong><br />
06_2_03.pdf<br />
Berufsbildung für eine globale Gesellschaft<br />
Perspektiven <strong>im</strong> 21. Jahrhundert<br />
Das folgende Bild 6 zeigt beispielhaft die Topologie der Vernetzung eines modernen Oberklasse-<br />
Fahrzeuges, hier Audi A 8, ab Mj 2003.<br />
Abstandsregelung<br />
Diagnoseanschluß<br />
Einparkhilfe<br />
Dachelektronik<br />
Ausstelldach<br />
ABS/ESP<br />
Motorelektronik<br />
Im Bild sind vier unterschiedliche Bussysteme erkennbar:<br />
l der CAN-Bus (Controller Area Network);<br />
•l der LIN-Bus (Local Interconnect Network);<br />
l der MOST-Bus (Media Oriented Systems Transport) und<br />
l die Bluetooth-Funkstrecke.<br />
Getriebeelektronik<br />
Kl<strong>im</strong>aanlage Heizung<br />
Frontscheibe<br />
Gebläse<br />
LIN<br />
CAN<br />
CAN<br />
CAN<br />
CAN<br />
CAN<br />
Steuergerät<br />
Inform. vorn<br />
Diagnoseinterface<br />
für Datenbus J533<br />
(Gateway)<br />
Kartenleser<br />
Navigation<br />
MOST<br />
Bild 6: Bus-Topologie des Audi A8, Mj 2003 (Ausschnitt) ; Quelle : Audi<br />
Bluetooth<br />
Telematik<br />
TV-Tuner<br />
Verstärker<br />
Die Merkmale und Anwendungsbeispiele der genannten Bussysteme werden nun erläutert.<br />
Dokumentation 4. BIBB-Fachkongress 2002
– 7 –<br />
3. Merkmale von Bussystemen <strong>im</strong> <strong>Kraftfahrzeug</strong><br />
3.1 Der CAN-Bus<br />
06_2_03.pdf<br />
Berufsbildung für eine globale Gesellschaft<br />
Perspektiven <strong>im</strong> 21. Jahrhundert<br />
Der CAN Bus weist eine lineare Busstruktur, vergleiche das folgende Bild 7. Je nach Datenrate<br />
sind kurze Stichleitungen zu einzelnen Stationen möglich.<br />
Die Ausfallwahrscheinlichkeit des Gesamtsystems ist bei linearer Busstruktur - <strong>im</strong> Gegensatz zu<br />
ring- oder sternförmigen Busstrukturen - geringer. Bei Ausfall eines Teilnehmers steht der lineare<br />
Bus den anderen Teilnehmern weiterhin uneingeschränkt zur Verfügung.<br />
Allerdings ist eine lineare Topologie intolerant gegenüber Störungen auf dem Verbindungsnetz;<br />
eine Leitungsunterbrechung kann ganze Segmente vom Bus trennen.<br />
Die am Bus befi ndlichen Stationen, bei denen es sich sowohl um Steuergeräte als auch um Sensoren<br />
und Aktoren handeln kann, arbeiten nach dem Multi-Master-Prinzip. Dies bedeutet, daß<br />
die Zugriff skontrolle auf den Bus dezentral den beteiligten, sendefähigen Stationen obliegt und<br />
eine übergeordnete Verwaltung der Netzkonfi guration nicht notwendig ist.<br />
Bild 7: Lineare Busstruktur des CAN-Busses; Quelle: Bosch<br />
Auf der Busleitung können zwei logische Zustände übertragen werden:<br />
l der rezessive Zustand „Logisch 1“. (rezessiv= zurücktretend, unterdrückt)<br />
l der dominante Zustand „Logisch 0“ (dominant= vorherrschend).<br />
Die Begriff e „rezessiv“ und „dominant“ sind abgeleitet vom Kollisionsverhalten:<br />
Wenn zwei Stationen unterschiedliche Zustände auf dem Bus senden, setzt sich der dominante<br />
(vorherrschende Zustand) durch und unterdrückt den rezessiven Zustand. Wenn also Station A<br />
„1“ sendet und Station B „0“, dann ist dem Bus der Pegel „0“ vorhanden.<br />
Im Ruhezustand (engl. „Idle“ = untätig, unbeschäftigt), n<strong>im</strong>mt der Bus den rezessiven Zustand „1“<br />
an. Dieses Prinzip ist die Grundlage sowohl für die Prioritätssteuerung als auch für die Fehlererkennung.<br />
3.1.1 Adressierung und Priorisierung<br />
3.1.1.1 Inhaltsbezogene Adressierung<br />
Das CAN-System soll in einem best<strong>im</strong>mten Zeitrahmen bei möglichst geringer Datenrate alle<br />
Übertragungsanforderungen abarbeiten. Dazu muß <strong>im</strong>mer eine eindeutige Busvergabe gesichert<br />
sein. Dies erreicht CAN durch die Festlegung der Priorität <strong>im</strong> Identifi er.<br />
Dokumentation 4. BIBB-Fachkongress 2002
– 8 –<br />
Bild 8: Inhaltsbezogene Adressierung über einen Identifi er (Priorisierung); Quelle: Bosch<br />
06_2_03.pdf<br />
Berufsbildung für eine globale Gesellschaft<br />
Perspektiven <strong>im</strong> 21. Jahrhundert<br />
Jede per CAN übertragene Botschaft enthält eine Identifi kationsnummer (Identifi er), die den Inhalt<br />
der Botschaft (Botschaftstyp) für die Busteilnehmer eindeutig bezeichnet. Wenn eine Station<br />
eine Botschaft über den Bus sendet, kann diese Botschaft von allen angeschlossenen Stationen<br />
empfangen werden. Nach dem korrekten Empfang der Nachricht prüft jede Station anhand des<br />
Identifi ers, ob die empfangenen Daten für sie relevant sind oder ob sie ignoriert werden können.<br />
Beispielweise ist die Übermittlung der Fahrgeschwindigkeit für eine Station, die das Tastenbedienfeld<br />
für die elektrischen Fensterheber kontrolliert, nicht von Bedeutung. Ein Radio berücksichtigt<br />
dagegen die Fahrgeschwindigkeit, um die Wiedergabelautstärke bei hohen Fahrgeschwindigkeiten<br />
und entsprechenden Innenraumpegeln anzuheben.<br />
Der Verzicht auf eine Empfängeradresse ermöglicht also den Empfang einer Botschaft sowohl<br />
von beliebig vielen Stationen (Rundsendung) als auchvon einer einzelnen Station, ohne dass<br />
eine Änderung am Übertragungsverfahren notwendig wäre.<br />
Die inhaltsbezogene Adressierung erhöht die Freiheit bei der Gestaltung und der Konfi guration<br />
des Systems. Zusätzliche Stationen lassen sich einfach hinzufügen. Ist die neue Station ausschließlich<br />
Empfänger, sind bei den vorhandenen Stationen keine Änderungen der Hardware<br />
oder der Software erforderlich. So unterstützt es das Konzept der modularen Kfz-Elektronik sowie<br />
den Mehrfachempfang und die Synchronisation von verteilten Prozessen. Die Verteilung von<br />
Meßgrößen an mehrere Steuergeräte spart teure Sensoren.<br />
3.1.1.2 Priorisierung anhand des Identifi ers (Arbitrierung)<br />
Im Standardformat haben die Identifi er eine Länge von 11 Bit. (1 Bit kann die Zustände logisch 1<br />
oder logisch 0 annehmen). Damit sind prinzipiell 211=2048 mögliche Botschaftstypen (Identifi er)<br />
darstellbar. Weil aber die 7 höchsten Bit aufgrund Beschränkungen, die für die Fehlererkennung<br />
benötigt werden, nicht alle gleichzeitig „1“ sein dürfen, sind die 16 höchsten Botschaftstypen<br />
nicht gültig und verursachen einen Fehler. Es verbleiben somit 2048-16=2032 Botschaftstypen.<br />
Je kleiner die Botschaftsnummer ist, desto höher ist die Priorität einer Botschaft. Die höchste<br />
Priorität hat daher die Botschaft mit der Identifi kationsnummer „0“, dann „1“ dann „2“ usw.<br />
Sobald der Bus frei ist (Zustand „Idle“), kann jede Station beginnen, ihre wichtigste Botschaft zu<br />
senden.<br />
In einem Verbund aus mehreren Stationen entstehen hierbei natürlich Zugriff skonfl ikte, wenn<br />
mehrere Stationen versuchen, gleichzeitig Botschaften zu senden. Diese werden durch das<br />
Verfahren der „zerstörungsfreien bit-weisen Arbitrierung“ aufgelöst: Jede Station sendet und<br />
beobachtet „Bit für Bit“ den Buspegel.<br />
Dokumentation 4. BIBB-Fachkongress 2002
– 9 –<br />
Berufsbildung für eine globale Gesellschaft<br />
Perspektiven <strong>im</strong> 21. Jahrhundert<br />
Da, wie oben dargelegt, der Pegel „0“ dominant ist, überschreibt eine Station, die den Pegel „0“<br />
sendet, den Pegel „1“ einer anderen Station.<br />
Bild 9: Priorisierung einer Botschaft; Quelle: Bosch<br />
Erkennt eine Station A, die ein rezessives Bit sendet, zeitgleich ein dominantes Bit auf dem Bus,<br />
muß folglich eine andere Station B eine Botschaft mit höherer Priorität senden. Daher bricht die<br />
Station A ihren Sendevorgang ab und empfängt statt dessen weiter die Botschaft der Station B.<br />
Sobald also eine Station Zugriff auf den Bus hat, werden alle anderen Stationen Empfänger der<br />
Nachricht.<br />
Wie in Bild 9 gezeigt, wird Station 1 mit dem dritten Bit zum Empfänger. Mit dem siebten Bit<br />
bekommt Station 2 die Priorität gegenüber Station 3 und setzt ihre Nachricht ab. Alle anderen<br />
Stationen empfangen diese Nachricht und beginnen anschließend erneut, ihre Botschaften zu<br />
senden.<br />
3.1.1.3 Datenübertragung mit CAN<br />
Die Übertragung von Informationen erfolgt <strong>im</strong> CAN-Bus in kurzen Botschaften mit einer Datenlänge<br />
zwischen 0 und 8 Byte.<br />
Das CAN-Protokoll läßt zwei Formate zu:<br />
•l ein Standardformat mit einem 11 Bit langen Identifi er und<br />
l ein erweitertes Format mit einem 29 Bit langen Identifi er.<br />
Die beiden Formate sind untereinander kompatibel und können gemeinsam in einem bestehenden<br />
Netzwerk zur Anwendung kommen. Die Botschaftsrahmen beider Formate unterscheiden<br />
sich ausschließlich in der Länge des Identifi ers und sind aus sieben aufeinander folgenden Feldern<br />
aufgebaut.<br />
3.1.2 Störungserkennung und ihre Behandlung<br />
CAN verfügt über eine Reihe von Kontrolleinrichtungen zur Störungserkennung:<br />
l Der Cyclic Redundancy Check (CRC) erkennt mit einem Rahmensicherungswort <strong>im</strong> Datenrahmen<br />
Übertragungsstörungen. Der leistungsfähige CRC des CAN ist speziell an die kurzen<br />
Botschaften der Kommunikation <strong>im</strong> <strong>Kraftfahrzeug</strong> angepaßt.<br />
l Während des Sendens überprüft jede Station den Buspegel. Findet sie auf der Busleitung – außer<br />
<strong>im</strong> Arbitrierungsfeld – einen anderen Bitwert als den gesendeten, liegt ein Fehler vor.<br />
Wird von einer Station ein Übertragungsfehler erkannt, sendet diese einen Fehlercode auf den<br />
Bus, so daß alle anderen Stationen ebenfalls die soeben übertragene Botschaft verwerfen. Auch<br />
der Sender erkennt den Übertragungsfehler und wiederholt seine Botschaft.<br />
06_2_03.pdf<br />
Dokumentation 4. BIBB-Fachkongress 2002
– 10 –<br />
Berufsbildung für eine globale Gesellschaft<br />
Perspektiven <strong>im</strong> 21. Jahrhundert<br />
Übertragungsfehler können von allen Stationen erkannt werden; dabei ist es unwichtig, ob die<br />
Stationen die entsprechende Botschaft weiterverarbeiten oder ignorieren, weil die Botschaft<br />
Inhalte enthält, die für ihre Stationen ohne Bedeutung sind.<br />
Das folgende Bild 10 zeigt beispielhaft die Zusammensetzung einer Fehlermeldung nach Protokoll<br />
SAE J1939-73.<br />
Bild 10: Fehlermeldung nach Protokoll SAE J1939-73; Quelle: IVECO<br />
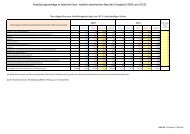
3.1.3 Standardisierung<br />
Das CAN-Protokoll wurde sowohl von der ISO als auch von der SAE für verschiedene Bereiche<br />
standardisiert. Dabei wird hinsichtlich der Übertragungsgeschwindigkeit zwischen Low-Speed<br />
und High-Speed-Anwendungen, hinsichtlich des Botschaftsrahmens zwischen Standardformat<br />
und erweitertem Format unterschieden, vergleiche die folgende Tabelle.<br />
Darüber hinaus wird die Anwendung von CAN zur Diagnose vorgeschlagen. Hierzu existiert auch<br />
bereits ein ISO-Vorschlag; die Verabschiedung ist jedoch noch nicht erfolgt.<br />
06_2_03.pdf<br />
Übertragungsgeschwindigkeit<br />
Organisation Low-Speed (< 125 kBit/s) High Speed (>125 kBit/s)<br />
ISO ISO 11519-2 ISO 11898<br />
SAE passenger<br />
cars<br />
J 22584 (CAN - standard<br />
format)<br />
SAE trucks and bus J 1939 (CAN - extended format)<br />
Dokumentation 4. BIBB-Fachkongress 2002
– 11 –<br />
3.1.4 Anwendungsbeispiel für Echtzeit: Laufunruhe-Erkennung<br />
06_2_03.pdf<br />
Berufsbildung für eine globale Gesellschaft<br />
Perspektiven <strong>im</strong> 21. Jahrhundert<br />
Als Beispiel für eine Echtzeit-Anwendung zeigt die folgende Darstellung die Laufunruhe-Erkennung<br />
als Zündaussetzer-Erkennung <strong>im</strong> Rahmen der Europäischen On-Board-Diagnose, EOBD.<br />
Ziel dieser Funktion ist, Zündaussetzer zu erkennen, die einerseits wegen des unverbrannten<br />
Kraftstoff es die Luftqualität beeinträchtigen, andererseits den Katalysator überhitzen und damit<br />
unwirksam machen können. Letzteres zieht neben einem pekuniären Schaden auch wiederum<br />
eine Luftverschlechterung nach sich.<br />
Mit Hilfe des induktiven Impulsgebers wird am Inkrementenrad, einem mit der Kurbelwelle verbundenen<br />
Zahnrad (Bild 11), zusätzlich zur Erfassung der Drehzahl die Drehgeschwindigkeit des<br />
Motors gemessen.<br />
Zur Aussetzererkennung wird das Inkrementenrad steuergeräteintern entsprechend dem<br />
Zündabstand in vier Segmente aufgeteilt. Dies sind z.B. bei einem Achtzylinder-Motor vier<br />
Zündvorgänge pro Kurbelwellenumdrehung. Im Steuergerät wird die Periodendauer (T) der<br />
einzelnen Inkrementenrad-Segmente gemessen. Ist der Verbrennungsablauf in allen Zylindern<br />
in Ordnung, so ist die Periodendauer aller Inkrementenrad-Segmente gleich lang (T1 = T2 = T3<br />
= T4, vgl. Bild 12).<br />
Tritt nun an einem Zylinder eine Störung auf (Aussetzer), so verlängert sich die diesem Zylinder<br />
zugeordnete Periodendauer um Bruchteile von Millisekunden (T1 > T2, T3, T4, vgl. Bild 12). Diese<br />
Segmentzeiten werden <strong>im</strong> Steuergerät statistisch ausgewertet, vgl. Bild 13. Für jeden Kennfeldpunkt<br />
sind die max<strong>im</strong>al zulässigen Laufunruhewerte, d. h. die Abweichung der Periodendauer<br />
eines Segments, als Funktion von Drehzahl, Last und Motortemperatur abgelegt.<br />
Bild 11: Bauteil-Darstellung für Aussetzer-Erkennung: Inkrementenrad; Quelle BMW<br />
Dokumentation 4. BIBB-Fachkongress 2002
– 12 –<br />
06_2_03.pdf<br />
Berufsbildung für eine globale Gesellschaft<br />
Perspektiven <strong>im</strong> 21. Jahrhundert<br />
T1 T2 T3 T4 T1 = T2 = T3 = T4 usw.<br />
T1<br />
1 2<br />
3 4<br />
T2 T3 T4<br />
Motorlauf i. O.<br />
Bild 12: Prinzipdarstellung der Aussetzererkennung; Quelle: BMW<br />
Bild 13: Aufzählen der einzelnen Aussetzer; Quelle: BMW<br />
Zündaussetzer <strong>im</strong><br />
Abschnitt T1:<br />
T1 > T2, T3, T4 usw.<br />
KT-382-M62<br />
Dokumentation 4. BIBB-Fachkongress 2002
– 13 –<br />
Berufsbildung für eine globale Gesellschaft<br />
Perspektiven <strong>im</strong> 21. Jahrhundert<br />
Die Laufunruheabweichungen <strong>im</strong> Falle von Aussetzern liegen <strong>im</strong> Bereich von Bruchteilen von<br />
Millisekunden. Bei Überschreiten dieser zulässigen Werte werden die als fehlerhaft detektierten<br />
Zylinder <strong>im</strong> Fehlerspeicher abgelegt.<br />
In Abhängigkeit der Höhe der festgestellten Aussetzerrate kann als weitere Maßnahme die Einspritzung<br />
der betroff enen Zylinder zum Schutz des Katalysators vor Überhitzung abgeschaltet<br />
werden.<br />
Um bei zufällig aufgetretenen Fehlern ein dauerhaftes Abschalten eines Zylinders zu vermeiden,<br />
wird bei jedem Neustart die Einspritzung wieder aktiviert. Liegt der Fehler, der zum Abschalten<br />
des Zylinders geführt hat, <strong>im</strong>mer noch vor (Aussetzererkennung), so wird die Einspritzung des<br />
betreff enden Zylinders nach dem Neustart erneut abgeschaltet. Läuft der Motor nach dem Neustart<br />
jedoch fehlerfrei, so bleibt die Einspritzung aktiviert. Der Eintrag <strong>im</strong> Fehlerspeicher bleibt<br />
aber erhalten. Wird über 40 Neustarts nacheinander kein Fehler mehr erkannt, so wird der Fehler<br />
auch <strong>im</strong> Fehlerspeicher gelöscht.<br />
Eine opt<strong>im</strong>ale Auswertung erfordert hohe Übertragungsraten (bis zu vier Meßwerte pro Umdrehung)<br />
sowie eine Übertragung in nahezu Echtzeit an das auswertende Steuergerät. Neben<br />
steilen Signalfl anken und damit niedrigen Ausgangs<strong>im</strong>pedanzen in den zugehörigen Sensoren,<br />
die mit Leistungstransistoren oder speziellen Treiberbausteinen ausgestattet sind, muß bei einer<br />
Übertragung per CAN-Bus eine entsprechend hohe Datentransferrate zur Verfügung stehen,<br />
damit keine Datenstaus entstehen, die die Auswertung behindern.<br />
3.1.5 Zusammenfassung CAN-Bus<br />
Die folgende Tabelle zeigt zusammenfassend die wesentlichen Merkmale des CAN-Busses.<br />
Bezeichnung Controller Area Network<br />
Standard USA J 1850, OBD II; Europa; weltweit akzeptiert<br />
Übertragungsmedium Kupferleitung, Twisted Pair, mit oder ohne Abschirmung<br />
Übertragungsrate/<br />
Nutzung<br />
3.2 Der LIN-Bus<br />
Wie Bild 6 zeigt, befi nden sich die <strong>im</strong> LIN vernetzten Komponenten innerhalb eines begrenzten<br />
Bauraums, z. B. Dach. Daher bezeichnet man den LIN auch als lokal vernetztes Subsystem. In<br />
jedem dieser begrenzten Bauräume befi ndet sich, angesteuert durch den CAN-Bus, ein LIN-Master-Steuergerät,<br />
dem bist zu 16 LIN-Slave-Komponenten untergeordnet sein können. Dies ist <strong>im</strong><br />
folgenden Bild veranschaulicht.<br />
06_2_03.pdf<br />
Class A: < 10 kBit/s, z.B. Kl<strong>im</strong>aanlage...<br />
Class B: > Byteflight);<br />
CAN zur Diagnose noch keine ISO, aber ISO-Entwurf<br />
Nutzer/Entwickler Automobilhersteller weltweit; Bosch (Pionier)<br />
Dokumentation 4. BIBB-Fachkongress 2002
– 14 –<br />
LIN-Slave 1<br />
Frontscheibenheizung<br />
06_2_03.pdf<br />
LIN-Slave 2<br />
Frischluftgebläse<br />
Steuergerät<br />
Kl<strong>im</strong>aanlage<br />
LIN-Slave 3<br />
PTC-<br />
Zusatzheizer,<br />
re<br />
Bild 14: Master-Slave-Hierarchien <strong>im</strong> LIN<br />
Berufsbildung für eine globale Gesellschaft<br />
Perspektiven <strong>im</strong> 21. Jahrhundert<br />
LIN-Master 1 LIN-Master 2<br />
LIN-Slave 4<br />
PTC-<br />
Zusatzheizer,<br />
li<br />
LIN-Slave 1<br />
Schiebedachmotor<br />
Die <strong>im</strong> Bild 14 dargestellten und am CAN-Bus angeschlossenen Steuergeräte führen die LIN-Master-Funktionen<br />
aus. Als LIN-Komponenten können sowohl Steuergeräte als auch Sensoren und<br />
Aktoren fungieren.<br />
Die <strong>im</strong> LIN integrierten Sensoren verfügen über eine Elektronik, die die gemessenen Werte auswertet.<br />
Deren Übertragung erfolgt dann als digitales Signal <strong>im</strong> LIN-Bus. Analog zum CAN-Bus<br />
wird für mehrere Sensoren und Aktoren nur ein Pin an der Buchse des LIN-Masters benötigt.<br />
Die <strong>im</strong> LIN integrierten Aktoren erhalten ihren Funktionsauftrag vom LIN-Master-Steuergerät<br />
durch das LIN-Datensignal. Über speziell in den Aktoren vorhandenen Sensoren kann der Ist-Zustand<br />
der Aktoren durch den LIN-Master abgefragt und somit ein Soll-Ist-Vergleich durchgeführt<br />
werden.<br />
Adressierung, Priorisierung, Datenübertragung und Störungserkennung <strong>im</strong> LIN verlaufen analog<br />
zum CAN-Bus, wenngleich auch mit wesentlich geringeren Datenübertragungsraten. Die folgende<br />
Tabelle zeigt die wesentlichen Merkmale des LIN-Busses in zusammengefasster Form.<br />
CAN<br />
Bezeichnung Local Interconnect Network<br />
Standard Seit 1999 offener Standard<br />
Übertragungsmedium Kupferleitung, Eindraht-Bus; keine Abschirmung<br />
Übertragungsrate/<br />
Nutzung<br />
Steuergerät<br />
Dachmodul,<br />
vorn<br />
1 - 20 kBit/s; lokales Subsystem, z.B. Kl<strong>im</strong>aanlage, Dachmodul...;<br />
LIN-Master-Steuergerät mit bis zu 16 LIN-Slave-<br />
Steuergeräten/Komponenten<br />
Vorteile Breite Akzeptanz, billig, stabile Datenübertragung<br />
Nachteile<br />
Nutzer/Entwickler Audi, BMW, Da<strong>im</strong>lerChrysler, Motorola, VW, Volvo<br />
Dokumentation 4. BIBB-Fachkongress 2002
– 15 –<br />
3.3 Optische Datenbusse<br />
3.3.1 Merkmale und Vorteile optischer Datenbusse<br />
06_2_03.pdf<br />
Berufsbildung für eine globale Gesellschaft<br />
Perspektiven <strong>im</strong> 21. Jahrhundert<br />
Die Übertragungsraten von max<strong>im</strong>al einem Megabit pro Sekunde bei CAN-Bussystemen reichen<br />
für die Übertragung von Audio- oder Videodaten nicht aus. Im Bereich der Sprach- und Datenkommunikation<br />
liegen sowohl unidirektionale Verbindungen (Radiosignale, AM/FM, Fernsehdaten,<br />
DAB, Navigationsdaten, GPS) als auch bidirektionale Verbindungen (GSM, UMTS) vor; vergleiche<br />
auch Bild 6. Die benötigten Übertragungsraten/Bandbreiten liegen bei bis zu 150Mbit/s.<br />
Diese Datenraten können bei Bussystemen mit elektrischer Signalübertragung nur mit hohem<br />
technischen Aufwand und damit Kosten realisiert werden.<br />
In wirtschaftlicher Ausführung werden diese Datenraten nur mit optischen Übertragungsverfahren<br />
erreicht.<br />
Wesentliche Vorteile optischer Übertragungsverfahren sind<br />
l Unempfi ndlichkeit gegen elektromagnetische Störungen und Übersprecheff ekte zwischen<br />
benachbarten Leitungen;<br />
l Kosten- und Gewichtseinsparungen durch reduzierten Verkabelungsaufwand.<br />
Die nachfolgende Übersicht vergleicht den auf Basis von Kupferleitungen arbeitenden CAN Bus<br />
mit optischen Systemen über Kunststoff -Lichtwellenleiter hinsichtlich Datenrate und möglichen<br />
Einsatzgebieten.<br />
CAN B CAN C D2B Optical MOST byteflight<br />
Max. Bitrate 125 kBit/s 1000 kBit/s 5,65 MBit/s 22,5 MBit/s 10 MBit/s<br />
typischer<br />
Einsatz<br />
Steuerdaten<br />
, Karosserie-<br />
systeme<br />
Steuerund<br />
Regeldate<br />
n Antriebs-<br />
strang<br />
Steuer- und<br />
Audiodaten,<br />
Kommunika<br />
tion<br />
Steuer-,<br />
Audio- und<br />
Videodaten,<br />
Kommunika<br />
tion<br />
Physical Layer ISO 11519-2 ISO 11898 Fibre-Optic-Transceiver<br />
Übertragungsmedien<br />
twisted pair oder<br />
parallele Leitung<br />
Kunststoff-Lichtwellenleiter<br />
Signaldaten,<br />
Auslösung<br />
Rückhaltesysteme<br />
Optische Übertragungssysteme sind häufi g als Ringtopologien ausgeführt; für sicherheitsrelevante<br />
Systeme werden aber auch Sterntopologien eingesetzt. Die Lichtwellenfaser wird aus<br />
Polymethylmethacrylat, PMMA, auch Acrylglas oder Plexiglas genannt, produziert. PMMA ist ein<br />
hartes und transparentes Material, das Licht besser als normales Glas leitet. Die Lichtwellenfaser<br />
wird mit Fluorpolymer beschichtet und durch einen Mantel aus Polyamid, PA, geschützt. Der zulässige<br />
Temperaturbereich für die eingesetzten Lichtwellenleiter mit PMMA-Kern liegt zwischen<br />
–40 und 85 Grad Celsius bei 0,2 Dezibel pro Quadratmeter optischer Dämpfung. Neuentwicklungen<br />
versprechen erweiterte Temperaturbereiche. Bei der Montage der Lichtwellenleiter <strong>im</strong><br />
Fahrzeug sind die zulässigen Biegeradien von etwa 25 Mill<strong>im</strong>eter zu beachten. Bei kleineren<br />
Biegeradien, bis ungefähr 15 Mill<strong>im</strong>eter, n<strong>im</strong>mt die Dämpfung geringfügig zu.<br />
Als Sende- und Empfangsbauelemente dienen <strong>im</strong> Automobil optoelektrische Wandler, welche<br />
die Signale in elektrische und umgekehrt wandeln. Weiterverarbeitet werden diese <strong>im</strong> Prozessor-<br />
IC.<br />
Der optische Kontakt hat die Aufgabe, den Lichtwellenleiter zu fi xieren und das optische Signal<br />
vom Lichtwellenleiter auf ein aktives Element oder eine andere Faser zu übertragen. Eine hohe<br />
Güte der Stirnfl äche, maßgeblich für das Verhalten des Gesamtsystems, wird beispielsweise<br />
durch Rotationssägfräsen erreicht. Die Steckverbinder erfüllen ähnliche Aufgaben wie bei Kupferverbindungen,<br />
sind jedoch nach Anwendung unterschiedlich ausgeprägt.<br />
Dokumentation 4. BIBB-Fachkongress 2002
– 16 –<br />
Berufsbildung für eine globale Gesellschaft<br />
Perspektiven <strong>im</strong> 21. Jahrhundert<br />
Die Anforderungen an optische Kontaktsysteme sind vergleichbar mit denen für elektrische<br />
Verbindungen. Neben der Einhaltung der in den Prüfrichtlinien der Fahrzeughersteller vorgegebenen<br />
Grenzwerte für Kl<strong>im</strong>a-, Schwingungs- und Schockbelastungen ist für die Fixierung des<br />
Lichtwellenleiters <strong>im</strong> Steckverbinder eine Auszugskraft von 60 Newton zu gewährleisten. Auf einer<br />
Übertragungsstrecke darf die durch die optische Dämpfung verbrauchte Lichtleistung nicht<br />
größer sein als die Diff erenz zwischen Sendeleistung des Senders und Empfangsempfi ndlichkeit<br />
des Empfängers.<br />
Daher wird die Verfügbarkeit leistungsfähiger und kostengünstiger Verbindungstechniken für<br />
optische Leiter sowie optoelektrischer Wandler zu einer wichtigen Größe be<strong>im</strong> Einsatz <strong>im</strong> <strong>Kraftfahrzeug</strong>.<br />
Seit Anfang der neunziger Jahre werden zunehmend optische Bussysteme, wie D2B und MOST,<br />
eingesetzt. Diese fanden zunächst bei Komfort-, Informations- und Kommunikationssystemen<br />
Verwendung, werden jedoch gegenwärtig auch bei Sicherheitssystemen eingesetzt. Beispielhaft<br />
hierzu sei die 7-er Reihe von BMW mit dem Bytefl ight-Bus genannt.<br />
Die erzielbaren Datenraten bei MOST sind für derzeitige Anwendungen bereits gut geeignet.<br />
In der Entwicklung befi ndliche Systeme, wie MOST 2 und der aus der Computertechnik bereits<br />
bekannte IEEE 1394 werden Datenraten ermöglichen, die das Anwendungsspektrum bis hin zu<br />
einer vollständigen Multi-Media-Umgebung <strong>im</strong> Automobil erweitern.<br />
3.3.2 Der D2B (Domestic Digital Bus)<br />
Domestic Digital Bus nutzt anstelle von Kupferkabeln Lichtwellenleitern aus Kunststoff , um Informationen<br />
mit mehr als 5,6 Mbit/s zu übertragen. Dies ermöglicht auch die Übertragung von<br />
Nutzdaten selbst, beispielsweise <strong>im</strong> Audiobereich.<br />
D2B wird beispielsweise von Mercedes-Benz in der neuen S-Klasse eingesetzt. Dort sind bis zu<br />
40 elektronische Steuergeräte über drei digitale Datenbusse vernetzt. Über 850 verschiedene<br />
Informationsarten werden ausgetauscht und steuern mehr als 170 Funktionen. Dies ermöglicht<br />
neue Funktionen und Schaltungen, die die Sicherheit, den Komfort und die Umweltverträglichkeit<br />
weiter verbessern. In der S-Klasse tauschen Autoradio oder COMAND mit Auto Pilot System,<br />
CD-Spieler, Soundsystem, Festeinbau-Telefon mit Notrufsystem TELE-AID, Handy und Sprachbedienung<br />
LINGUATRONIC ihre Signale über diesen optischen Datenbus aus.<br />
Die optische Ringleitung dient hier nicht nur für den Austausch von Befehlen und Informationen,<br />
sondern schickt auch die eigentlichen Audio-Signale mit einer Geschwindigkeit von 4,2 Millionen<br />
Bits pro Sekunde durch den Lichtwellenleiter.<br />
3.3.3 Der MOST-Bus (Media Oriented Systems Transport)<br />
MOST, Media Oriented Systems Transport, ist das Arbeitsergebnis eines Konsortiums internationaler<br />
Automobilhersteller und Zulieferer. Die topologische Struktur des Netzwerks ist wie bei<br />
D2B ein Ring, vgl. auch Bild 6. Die Lichtsignale werden über Kunststoff -Lichtwellenleiter von<br />
einem angeschlossenen Gerät zum nächsten transportiert und dort in elektrische Signale transformiert,<br />
die der MOST-Prozessor weiterverarbeitet. Die aufbereiteten Signale werden von einer<br />
LED wieder in optische Signale umgewandelt. Neben einer hohen Datenrate von 24,8 Megabits<br />
pro Sekunde erfüllt MOST weitere wichtige Anforderungen:<br />
l Eine zentrale Systemuhr gibt den Bustakt vor.<br />
l Das System gestattet eine automatische Rekonfi guration, wenn neue Geräte angeschlossen<br />
oder alte entfernt werden.<br />
l Signalunterschiede zwischen den Netzwerkknoten werden durch die MOST-Spezifi kation<br />
kompensiert.<br />
l Jeder Teilnehmer hat die Möglichkeit, auf den Bus zuzugreifen.<br />
l Die Verbindung vom MOST-Prozessor des jeweiligen Gerätes zum MOST-Prozessor des nächsten<br />
Gerätes erfolgt durch das optische Netzwerk des Datenbussystems.<br />
Zur Verbindungstechnik zählen die Anbindung der FOT, Fibre Optic Transceivers, an den MOST-<br />
Prozessor auf der Geräteleiterplatte, die Ankopplung der Lichtwellenleiter an die FOT, alle notwendigen<br />
optischen Gerätesteckverbinder und Kupplungen und die Lichtwellenleiter selbst.<br />
06_2_03.pdf<br />
Dokumentation 4. BIBB-Fachkongress 2002
– 17 –<br />
3.3.4 Anwendungsbeispiel<br />
06_2_03.pdf<br />
Berufsbildung für eine globale Gesellschaft<br />
Perspektiven <strong>im</strong> 21. Jahrhundert<br />
Verschiedene Fahrzeughersteller, darunter Audi, BMW und Mercedes, rüsten ihre Fahrzeuge mit<br />
Komfort- und Kommunikationssystemen aus, die auf optischen Bus-Systemen basieren. Stellvertretend<br />
für diese Hersteller wird das MMI-Konzept von Audi nachfolgend kurz vorgestellt, das ab<br />
2003 <strong>im</strong> Audi A8 erhältlich sein wird.<br />
Bedienkonsole<br />
Hinter dem MMI-System verbirgt sich ein zentrales Bedienelement für fast alle Fahrzeugfunktionen<br />
<strong>im</strong> Auto. Es arbeitet mit einem einzigen Dreh-/Drückknopf und vier so genannten Softkeys<br />
in der Mittelkonsole, mit denen einzelne Funktionsbereiche wie „Entertainment“, „Information“,<br />
„Navigation“ oder „Steuerung“ aufgerufen werden können.<br />
Als wesentliche Merkmale seien die Erweiterbarkeit und die freien Konfi gurationsmöglichkeiten<br />
hervorgehoben: Auf dem MOST-System ist ein auf dem TCP/IP-Protokoll basierendes Netzwerk<br />
aufgesetzt. So können selbst aufwendige Bildschirmanzeigen beispielsweise von einem Navigationssystem<br />
in Echtzeit eingespeist werden, ohne daß der Nutzer Verzögerungen <strong>im</strong> Bildaufbau<br />
bemerkt.<br />
BMW bietet in seiner 7-er Reihe ein ähnliches System an.<br />
Auch <strong>im</strong> Nutzfahrzeugbereich ergeben sich Einsatzgebiete für optische Bussysteme, wie dies bereits<br />
<strong>im</strong> Bild 3 über zukünftige Assistenzsysteme zur Umfelderfassung von MAN verdeutlicht ist.<br />
3.4 Die Bluetooth-Technologie <strong>im</strong> <strong>Kraftfahrzeug</strong><br />
Display<br />
Bild 15: MMI-Konzept, Beispiel Audi A8, ab Mj 2003; Quelle: Audi<br />
Die Bluetooth-Technologie hat sich aus der mobilen Sprach-und Datenkommunikation entwickelt,<br />
wie sie derzeit <strong>im</strong> GSM-Funkzellennetz, beziehungsweise UMTS-Netz genutzt wird. Dabei<br />
handelt es sich um eine Kommunikation zwischen einer Basisstation und einer mobilen Station.<br />
GSM (Global System for Mobile Communication) defi niert einen internationalen digitalen Kommunikationsstandard<br />
für Funktelefone, in Deutschland <strong>im</strong> D-und E-Netz angewendet. Genutzt<br />
wird hierbei ein digitales Modulationsverfahren, bei dem die Frequenz des Trägersignals durch<br />
ein digitales Nutzsignal beeinfl usst wird (Frequenztastung). Das hier verwendete Modulationsverfahren<br />
kommt mit einer geringen Bandbreite aus; daher ist es möglich, die für einen Funkdienst<br />
verwendeten Kanäle zu max<strong>im</strong>ieren. Die Nutzinformation wird als digitaler Datenblock<br />
innerhalb eines defi nierten Zeitschlitzes <strong>im</strong> Mikrosekunden-Bereich übertragen. Während der<br />
Signalübertragung zwischen Basisstation und Mobilstation kann der Trägerfrequenzkanal<br />
gewechselt werden (Frequenzsprungverfahren); dies führt zu einer opt<strong>im</strong>alen Auslastung der<br />
begrenzten Trägerfrequenzkanäle.<br />
Dokumentation 4. BIBB-Fachkongress 2002
– 18 –<br />
Berufsbildung für eine globale Gesellschaft<br />
Perspektiven <strong>im</strong> 21. Jahrhundert<br />
Während für die mobile Sprachkommunikationen die <strong>im</strong> GSM-Netz verfügbare Datenübertragungsrate<br />
von knapp 10 kBit pro Sekunde völlig ausreichte, sind für die mobile Datenkommunikation<br />
zwischen mobilen DV-Geräten, wie Mobiltelefon, Notebook, PDA, Datenübertragungsraten<br />
<strong>im</strong> Bereich von MBit pro Sekunde erforderlich. Der Datenaustausch zwischen diesen mobilen<br />
Geräten war in der Vergangenheit nur durch eine Leitungs- oder Infrarotverbindung möglich.<br />
Diese nicht standardisierten Verbindungen schränkten den Bewegungsraum sehr ein oder waren<br />
kompliziert zu handhaben.<br />
Mit der von der Firma Ericsson entwickelten Bluetooth-Technologie ist es seit kurzem möglich,<br />
die mobilen Geräte unterschiedlicher Hersteller über eine standardisierte Funkverbindung zu<br />
verknüpfen.<br />
Die Bluetooth-Technologie nutzt das weltweit verfügbare und derzeit lizenzfreie Frequenzband<br />
von 2,40 bis 2,48 GHz. Die sehr kurze Wellenlänge dieser Frequenz ermöglicht es, Antenne, Steuerung<br />
und Verschlüsselung sowie die komplette Sende- und Empfangseinheit <strong>im</strong> Bluetooth-Modul<br />
zu integrieren. Dessen geringe Baugröße gestattet den Einbau in elektronische Kleingeräte.<br />
Ist die Bluetooth-Technologie in mobilen Geräten nicht vorhanden, so kann sie unter Umständen<br />
über einen Adapter, z. B. eine PC-Card oder USB integriert werden.<br />
Die Datenübertragungsrate beträgt bis zu 1MBit pro Sekunde. Die Geräte können bis zu drei<br />
Sprachkanäle gleichzeitig übertragen. Wegen der hohen Frequenz ist die Sendeleistung sehr<br />
gering. Daher haben Bluetooth-Sender eine Reichweite von lediglich zehn Metern; mit Zusatzverstärker<br />
sind bis zu hundert Metern möglich.<br />
Da sich in dem von Bluetooth genutzten Frequenzbereich von 2,40 bis 2,48 GHz auch andere<br />
Anwendungen befi nden, wie z. B. Garagentoröff ner, Mikrowellen-Herde sowie medizinische<br />
Geräte, ist ein aufwändiges Verfahren zur Störsicherheit entwickelt worden. Auch hat man bei<br />
der Entwicklung der Bluetooth-Technologie sehr großen Wert auf den Schutz der übertragenen<br />
Daten gegen Manipulationen sowie unerlaubtes Mithören getroff en. So werden z. B. die<br />
Daten mit einem 128-Bit-langen Schlüssel codiert. Der Empfänger wird mit einem gleich langen<br />
Schlüssel auf seine Echtheit überprüft. Dabei nutzen die Geräte ein gehe<strong>im</strong>es Passwort, durch<br />
das sich die einzelnen Teilnehmer gegenseitig erkennen. Der Schlüssel wird für jede Verbindung<br />
neu erzeugt. Da die Reichweite auf zehn Meter begrenzt ist, müsste eine Manipulation in diesem<br />
Bereich erfolgen. Dies erhöht zusätzlich die Datensicherheit.<br />
Zur Weiterentwicklung der Bluetooth-Technologie haben sich rund 2000 Firmen aus den Bereichen<br />
Telekommunikation, <strong>Datenverarbeitung</strong>, Geräte-und Fahrzeughersteller zu einer Bluetooth<br />
Special Interest Group, SIG, zusammengeschlossen.<br />
Die Bluetooth-Technologie wird erstmals <strong>im</strong> Audi A8 ab Mj 2003 zur kabellosen Verbindung<br />
zwischen dem Bedienhörer für Telefon und dem Steuergerät für Telefon/Telematik verwendet;<br />
vergleiche auch Bild 6. Zu einem späteren Zeitpunkt sind weitere Anwendungsmöglichkeiten für<br />
den Fahrzeugnutzer vorgesehen, wie zum Beispiel<br />
l Einbau eines zweiten Bedienenhöhrers <strong>im</strong> Fond;<br />
l Anbindung von Notebooks, Smartphones und Notepads des Fahrzeugnutzers an das Internet<br />
zur Übertragung von Informationen und zur Unterhaltung;<br />
l Empfangen und Senden von E-Mails über das Notebook oder den PDA des Nutzers;<br />
l Übertragung von Adress- und Telefonnummern vom Notebook oder PDA des Nutzers zum<br />
Mult<strong>im</strong>edia-Interface, MMI, vergleiche Bild 15;<br />
l Freisprecheinrichtung für Mobiltelefone ohne zusätzliche Kabeladapter;<br />
l Verwendung in weiteren Fahrzeugsystemen, z. B. Funkfernbedienung der Standheizung.<br />
06_2_03.pdf<br />
Dokumentation 4. BIBB-Fachkongress 2002
– 19 –<br />
4. Zusammenfassung<br />
06_2_03.pdf<br />
Berufsbildung für eine globale Gesellschaft<br />
Perspektiven <strong>im</strong> 21. Jahrhundert<br />
Im Automobil hängen Umfang und Art des Datenaufkommens von der Komplexität sowie von<br />
der Zuordnung der Systemfunktionen zu den Bereichen Steuern und Regeln, Kommunikation,<br />
Unterhaltung und Information oder Sicherheit ab. Die gestiegenen ökonomischen und ökologischen<br />
Anforderungen sowie ein erhöhter Komfortanspruch führen zu einer ständigen Erweiterung<br />
der Fahrzeugfunktionen und damit der Steuerungskomponenten.<br />
Die zunehmend komplexe Vernetzung aller Steuerungskomponenten ist mit konventioneller<br />
Verkabelung nicht mehr wirtschaftlich realisierbar. Bustechniken ermöglichen hingegen die<br />
einfache Verbindung mehrerer Steuergeräte und reduzieren die erforderlichen Konvertierungen<br />
zwischen analogen und digitalen Signalen.<br />
Die Komponenten schneller und komplexer Regelfunktionen, wie ABS/R, ESP, Motormanagement<br />
und von Steuerungsfunktionen <strong>im</strong> Karosseriebereich, werden seit Anfang der neunziger<br />
Jahre zunehmend durch Bussysteme wie CAN, LIN etc. vernetzt. Die Signale fl ießen dabei über<br />
elektrische Netzwerke. Für den Signaleingang, die Signalverarbeitung, den Signalausgang sowie<br />
die Kommunikationsschnittstellen für die Diagnose wurden spezielle Halbleiterbausteine und<br />
Standardprotokolle entwickelt.<br />
Der auf der Basis von Kupferleitern arbeitende CAN-Bus ist mit einer Datenrate von max. 1000kBit/<br />
s standardisiert. Höhere Datenraten sind mit Kupferleitern aufgrund des schwierigen EMV-Umfelds<br />
<strong>im</strong> Fahrzeug nur mit hohem technischen und fi nanziellem Aufwand zu realisieren.<br />
Optische Datenbusse ermöglichen höhere Datenraten bis derzeit 25Mbit/s und sind unempfi ndlich<br />
gegen elektromagnetische Wechselwirkungen. Nachteilig wirken sich derzeit die Kosten für<br />
die Verbindungstechnik und die erforderlichen optoelektrischen Wandler aus.<br />
Mit höheren Datenraten können zukünftig auch breitbandige Nutzinformationen, wie z. B. Audio<br />
und Video, digital <strong>im</strong> Fahrzeug transportiert werden. Die höheren Datenraten ermöglichen<br />
zudem eine neue D<strong>im</strong>ension zeitnaher Informationsverarbeitung zur Motor- und Antriebssteuerung<br />
sowie zur Steuerung von Sicherheitssystemen.<br />
Die Verknüpfung unterschiedlichster Informations-, <strong>Datenverarbeitung</strong>s- und Mobilfunk-geräte<br />
<strong>im</strong> Fahrzeug ist über das Funksystem Bluetooth möglich.<br />
Die Vorteile der angesprochenen DV-Technologie <strong>im</strong> Automobil lassen sich gegenwärtig für die<br />
Werkstatt-Diagnose nur sehr eingeschränkt nutzen. Erforderlich ist die Erweiterung der derzeit<br />
verfügbaren Diagnosesysteme zu „Busanalysatoren“.<br />
5. Schrifttum<br />
Braess / Seiff ert (Hrsg.), Handbuch <strong>Kraftfahrzeug</strong>technik, Vieweg, Braunschweig, Wiesbaden<br />
2000.<br />
Pischinger/Wallentowitz (Hrsg.),11. Aachener Kolloquium Fahrzeug- und Motorentechnik, Aachen,<br />
2002.<br />
Wiesmeier / Appiano, Konzepte einer opt<strong>im</strong>ierten Lkw-Diagnose und –wartung, in: VDI-Berichte<br />
1617, Düsseldorf 2001.<br />
Schielen / Schaller, Fahrerassistenzsysteme für Nutzfahrzeuge – Komfort und Sicherheit, in: VDI-<br />
Berichte 1617, Düsseldorf 2001.<br />
o.A. CAN - das Netzwerk für die Elektronik <strong>im</strong> <strong>Kraftfahrzeug</strong>. Robert Bosch GmbH,<br />
Stuttgart, 2001.<br />
Burgmer / Ehritt, Navigationssysteme in VW Audi Fahrzeugen, Bonn, 2001.<br />
Dokumentation 4. BIBB-Fachkongress 2002