IAPG-JAHRESBERICHT 2011 - IAPG - Jade Hochschule
IAPG-JAHRESBERICHT 2011 - IAPG - Jade Hochschule
IAPG-JAHRESBERICHT 2011 - IAPG - Jade Hochschule

Sie wollen auch ein ePaper? Erhöhen Sie die Reichweite Ihrer Titel.
YUMPU macht aus Druck-PDFs automatisch weboptimierte ePaper, die Google liebt.
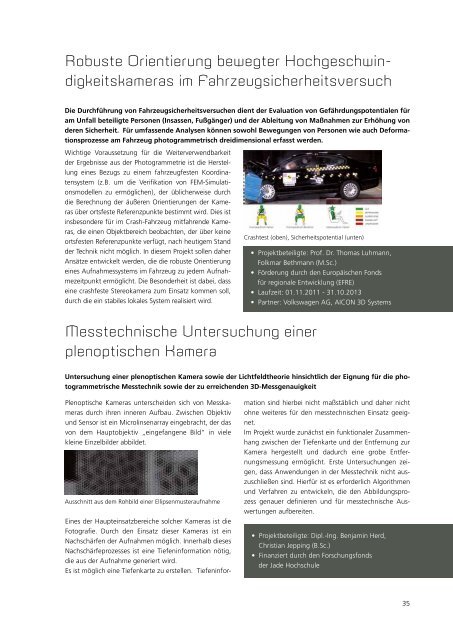
Robuste Orientierung bewegter Hochgeschwindigkeitskameras<br />
im Fahrzeugsicherheitsversuch<br />
Die Durchführung von Fahrzeugsicherheitsversuchen dient der Evaluation von Gefährdungspotentialen für<br />
am Unfall beteiligte Personen (Insassen, Fußgänger) und der Ableitung von Maßnahmen zur Erhöhung von<br />
deren Sicherheit. Für umfassende Analysen können sowohl Bewegungen von Personen wie auch Deformationsprozesse<br />
am Fahrzeug photogrammetrisch dreidimensional erfasst werden.<br />
Wichtige Voraussetzung für die Weiterverwendbarkeit<br />
der Ergebnisse aus der Photogrammetrie ist die Herstellung<br />
eines Bezugs zu einem fahrzeugfesten Koordinatensystem<br />
(z.B. um die Verifikation von FEM-Simulationsmodellen<br />
zu ermöglichen), der üblicherweise durch<br />
die Berechnung der äußeren Orientierungen der Kameras<br />
über ortsfeste Referenzpunkte bestimmt wird. Dies ist<br />
insbesondere für im Crash-Fahrzeug mitfahrende Kameras,<br />
die einen Objektbereich beobachten, der über keine<br />
ortsfesten Referenzpunkte verfügt, nach heutigem Stand<br />
der Technik nicht möglich. In diesem Projekt sollen daher<br />
Ansätze entwickelt werden, die die robuste Orientierung<br />
eines Aufnahmessystems im Fahrzeug zu jedem Aufnahmezeitpunkt<br />
ermöglicht. Die Besonderheit ist dabei, dass<br />
eine crashfeste Stereokamera zum Einsatz kommen soll,<br />
durch die ein stabiles lokales System realisiert wird.<br />
Crashtest (oben), Sicherheitspotential (unten)<br />
Messtechnische Untersuchung einer<br />
plenoptischen Kamera<br />
Untersuchung einer plenoptischen Kamera sowie der Lichtfeldtheorie hinsichtlich der Eignung für die photogrammetrische<br />
Messtechnik sowie der zu erreichenden 3D-Messgenauigkeit<br />
Plenoptische Kameras unterscheiden sich von Messkameras<br />
durch ihren inneren Aufbau. Zwischen Objektiv<br />
und Sensor ist ein Microlinsenarray eingebracht, der das<br />
von dem Hauptobjektiv „eingefangene Bild“ in viele<br />
kleine Einzelbilder abbildet.<br />
Ausschnitt aus dem Rohbild einer Ellipsenmusteraufnahme<br />
Eines der Haupteinsatzbereiche solcher Kameras ist die<br />
Fotografie. Durch den Einsatz dieser Kameras ist ein<br />
Nachschärfen der Aufnahmen möglich. Innerhalb dieses<br />
Nachschärfeprozesses ist eine Tiefeninformation nötig,<br />
die aus der Aufnahme generiert wird.<br />
Es ist möglich eine Tiefenkarte zu erstellen. Tiefeninfor-<br />
• Projektbeteiligte: Prof. Dr. Thomas Luhmann,<br />
Folkmar Bethmann (M.Sc.)<br />
• Förderung durch den Europäischen Fonds<br />
für regionale Entwicklung (EFRE)<br />
• Laufzeit: 01.11.<strong>2011</strong> - 31.10.2013<br />
• Partner: Volkswagen AG, AICON 3D Systems<br />
mation sind hierbei nicht maßstäblich und daher nicht<br />
ohne weiteres für den messtechnischen Einsatz geeignet.<br />
Im Projekt wurde zunächst ein funktionaler Zusammenhang<br />
zwischen der Tiefenkarte und der Entfernung zur<br />
Kamera hergestellt und dadurch eine grobe Entfernungsmessung<br />
ermöglicht. Erste Untersuchungen zeigen,<br />
dass Anwendungen in der Messtechnik nicht auszuschließen<br />
sind. Hierfür ist es erforderlich Algorithmen<br />
und Verfahren zu entwickeln, die den Abbildungsprozess<br />
genauer definieren und für messtechnische Auswertungen<br />
aufbereiten.<br />
• Projektbeteiligte: Dipl.-Ing. Benjamin Herd,<br />
Christian Jepping (B.Sc.)<br />
• Finanziert durch den Forschungsfonds<br />
der <strong>Jade</strong> <strong>Hochschule</strong><br />
35