

RS-Serie Manipulator-Handbuch - Das zeichnet Epson Roboter aus ...
RS-Serie Manipulator-Handbuch - Das zeichnet Epson Roboter aus ...
RS-Serie Manipulator-Handbuch - Das zeichnet Epson Roboter aus ...

Sie wollen auch ein ePaper? Erhöhen Sie die Reichweite Ihrer Titel.
YUMPU macht aus Druck-PDFs automatisch weboptimierte ePaper, die Google liebt.
Einrichten und Betrieb 1. Sicherheit<br />
1.4 Not-Aus<br />
Wenn sich der <strong>Manipulator</strong> während des Betriebes unnormal bewegt, drücken Sie sofort<br />
den Not-Aus-Taster. Der Taster unterbricht die Stromversorgung der Motoren, sodass der<br />
Arm so schnell wie möglich mithilfe der generatorischen Bremse und der mechanischen<br />
Bremse angehalten wird.<br />
Vermeiden Sie es jedoch, den Not-Aus-Taster unnötig zu drücken, während der<br />
<strong>Manipulator</strong> normal arbeitet. Andernfalls kann der <strong>Manipulator</strong> gegen die Peripheriegeräte<br />
schlagen, da sich die Bewegungsbahn während des Anhaltens des <strong>Roboter</strong>systems von der<br />
Bewegungsbahn im normalen Betrieb unterscheidet.<br />
Um das System während des normalen Betriebes in den Not-Aus-Modus zu versetzen,<br />
betätigen Sie den Not-Aus-Taster, wenn sich der <strong>Manipulator</strong> nicht bewegt.<br />
Lesen Sie im Steuerungshandbuch nach, wie der Not-Aus-Stromkreis zu verdrahten ist.<br />
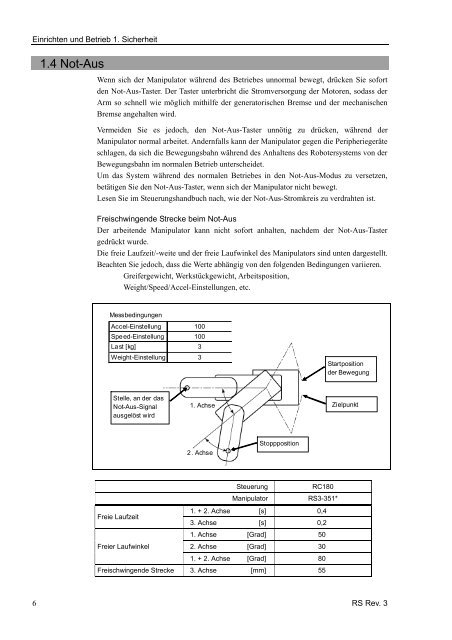
Freischwingende Strecke beim Not-Aus<br />
Der arbeitende <strong>Manipulator</strong> kann nicht sofort anhalten, nachdem der Not-Aus-Taster<br />
gedrückt wurde.<br />
Die freie Laufzeit/-weite und der freie Laufwinkel des <strong>Manipulator</strong>s sind unten dargestellt.<br />
Beachten Sie jedoch, dass die Werte abhängig von den folgenden Bedingungen variieren.<br />
Greifergewicht, Werkstückgewicht, Arbeitsposition,<br />
Weight/Speed/Accel-Einstellungen, etc.<br />
Messbedingungen<br />
Accel-Einstellung 100<br />
Speed-Einstellung 100<br />
Last [kg] 3<br />
Weight-Einstellung 3<br />
Stelle, an der das<br />
Not-Aus-Signal<br />
<strong>aus</strong>gelöst wird<br />
Freie Laufzeit<br />
Freier Laufwinkel<br />
1. Achse<br />
2. Achse<br />
Stoppposition<br />
Steuerung RC180<br />
<strong>Manipulator</strong> <strong>RS</strong>3-351*<br />
1. + 2. Achse [s] 0,4<br />
3. Achse [s] 0,2<br />
1. Achse [Grad] 50<br />
2. Achse [Grad] 30<br />
1. + 2. Achse [Grad] 80<br />
Freischwingende Strecke 3. Achse [mm] 55<br />
Startposition<br />
der Bewegung<br />
Zielpunkt<br />
6 <strong>RS</strong> Rev. 3













