

RS-Serie Manipulator-Handbuch - Das zeichnet Epson Roboter aus ...
RS-Serie Manipulator-Handbuch - Das zeichnet Epson Roboter aus ...
RS-Serie Manipulator-Handbuch - Das zeichnet Epson Roboter aus ...

Erfolgreiche ePaper selbst erstellen
Machen Sie aus Ihren PDF Publikationen ein blätterbares Flipbook mit unserer einzigartigen Google optimierten e-Paper Software.
Einrichten und Betrieb 4. Einstellung des Greifers<br />
4.4 Vorkehrungen für die Auto-Beschleunigung/Verzögerung der<br />
3. Achse<br />
HINWEIS<br />
�<br />
Wenn Sie den <strong>Manipulator</strong> horizontal mit einer PTP-Bewegung mit der 3. Achse (Z) an<br />
einer hohen Position verfahren, ist die Bewegungszeit kürzer.<br />
Wenn die 3. Achse unter einen bestimmten Punkt gelangt, wird die<br />
Auto-Beschleunigung/Verzögerung verwendet, um die Beschleunigung/Verzögerung zu<br />
reduzieren. (Siehe Abbildung unten.) Je höher die Position der Z-Achse ist, desto schneller<br />
ist die Bewegungs-Beschleunigung/Verzögerung. Es benötigt jedoch mehr Zeit, die<br />
3. Achse auf und ab zu bewegen. Stellen Sie die Position der 3. Achse für die<br />
<strong>Manipulator</strong>bewegung ein, unter Berücksichtigung der Beziehung zwischen der aktuellen<br />
Position und der Zielposition.<br />
Die Obergrenze für die 3. Achse während der horizontalen Bewegung mit dem<br />
Jump-Befehl kann mit dem LimZ-Befehl eingestellt werden.<br />
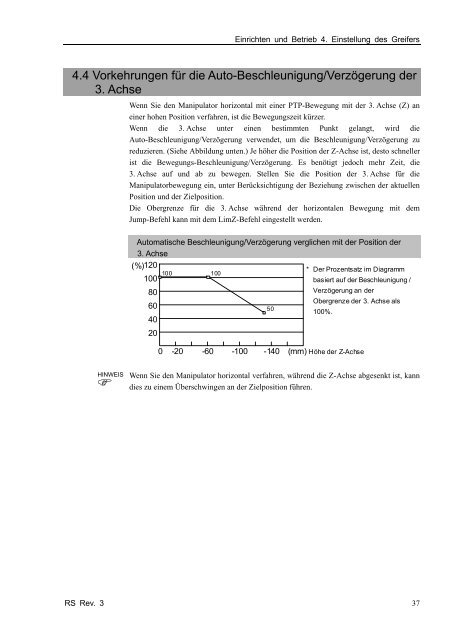
Automatische Beschleunigung/Verzögerung verglichen mit der Position der<br />
3. Achse<br />
(%) 120<br />
100<br />
100<br />
100<br />
* Der Prozentsatz im Diagramm<br />
basiert auf der Beschleunigung /<br />
80<br />
Verzögerung an der<br />
60<br />
40<br />
20<br />
50<br />
Obergrenze der 3. Achse als<br />
100%.<br />
0 -20 -60 -100 -140 (mm) Höhe der Z-Achse<br />
Wenn Sie den <strong>Manipulator</strong> horizontal verfahren, während die Z-Achse abgesenkt ist, kann<br />
dies zu einem Überschwingen an der Zielposition führen.<br />
<strong>RS</strong> Rev. 3 37













