

RS-Serie Manipulator-Handbuch - Das zeichnet Epson Roboter aus ...
RS-Serie Manipulator-Handbuch - Das zeichnet Epson Roboter aus ...
RS-Serie Manipulator-Handbuch - Das zeichnet Epson Roboter aus ...

Sie wollen auch ein ePaper? Erhöhen Sie die Reichweite Ihrer Titel.
YUMPU macht aus Druck-PDFs automatisch weboptimierte ePaper, die Google liebt.
Einrichten und Betrieb 3. Umgebungen und Installation<br />
Betriebs-<br />
höhe<br />
Platz für die Steuerung<br />
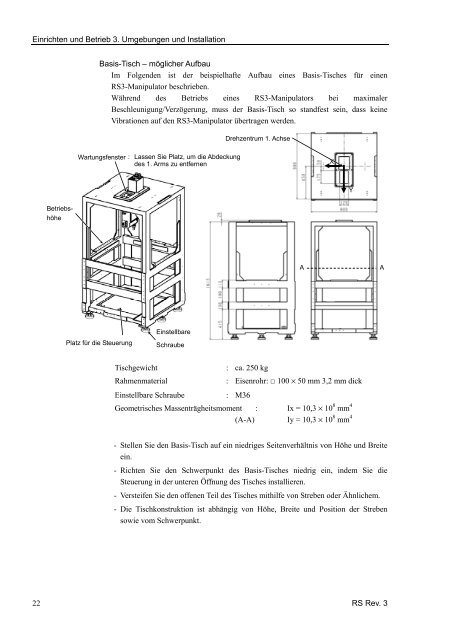
Basis-Tisch – möglicher Aufbau<br />
Im Folgenden ist der beispielhafte Aufbau eines Basis-Tisches für einen<br />
<strong>RS</strong>3-<strong>Manipulator</strong> beschrieben.<br />
Während des Betriebs eines <strong>RS</strong>3-<strong>Manipulator</strong>s bei maximaler<br />
Beschleunigung/Verzögerung, muss der Basis-Tisch so standfest sein, dass keine<br />
Vibrationen auf den <strong>RS</strong>3-<strong>Manipulator</strong> übertragen werden.<br />
Wartungsfenster<br />
: Lassen Sie Platz, um die Abdeckung<br />
des 1. Arms zu entfernen<br />
Einstellbare<br />
Schraube<br />
Drehzentrum 1. Achse<br />
Tischgewicht : ca. 250 kg<br />
Rahmenmaterial : Eisenrohr: □ 100 × 50 mm 3,2 mm dick<br />
Einstellbare Schraube : M36<br />
Geometrisches Massenträgheitsmoment : Ix = 10,3 × 10 8 mm 4<br />
(A-A) Iy = 10,3 × 10 8 mm 4<br />
- Stellen Sie den Basis-Tisch auf ein niedriges Seitenverhältnis von Höhe und Breite<br />
ein.<br />
- Richten Sie den Schwerpunkt des Basis-Tisches niedrig ein, indem Sie die<br />
Steuerung in der unteren Öffnung des Tisches installieren.<br />
- Versteifen Sie den offenen Teil des Tisches mithilfe von Streben oder Ähnlichem.<br />
- Die Tischkonstruktion ist abhängig von Höhe, Breite und Position der Streben<br />
sowie vom Schwerpunkt.<br />
22 <strong>RS</strong> Rev. 3<br />
A<br />
X<br />
Y<br />
A













