ppt-Präsentation zur Studienrichtung - Fakultät Elektrotechnik und ...
ppt-Präsentation zur Studienrichtung - Fakultät Elektrotechnik und ...
ppt-Präsentation zur Studienrichtung - Fakultät Elektrotechnik und ...

Sie wollen auch ein ePaper? Erhöhen Sie die Reichweite Ihrer Titel.
YUMPU macht aus Druck-PDFs automatisch weboptimierte ePaper, die Google liebt.
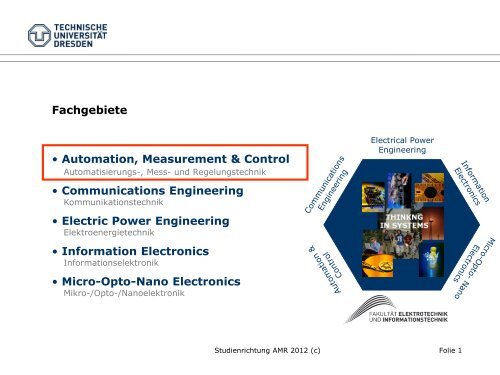
Fachgebiete<br />
• Automation, Measurement & Control<br />
Automatisierungs-, Mess- <strong>und</strong> Regelungstechnik<br />
• Communications Engineering<br />
Kommunikationstechnik<br />
• Electric Power Engineering<br />
Elektroenergietechnik<br />
• Information Electronics<br />
Informationselektronik<br />
• Micro-Opto-Nano Electronics<br />
Mikro-/Opto-/Nanoelektronik<br />
Communications<br />
Engineering<br />
Automation &<br />
Control<br />
Electrical Power<br />
Engineering<br />
<strong>Studienrichtung</strong> AMR 2012 (c) Folie 1<br />
Information<br />
Electronics<br />
Micro-Opto- Nano<br />
Electronics
<strong>Studienrichtung</strong> AMR 2012 (c) Folie 2
Prozessautomation spielt bei Energieeffizienz<br />
<strong>und</strong> –Intelligenz eine zentrale Rolle<br />
11.05.2011 <strong>Studienrichtung</strong> AMC 2007-2011 (c) UR Folie 4
SIEMENS-PTD: „2/3 unseres Umsatzes generieren wir im<br />
Projekt- <strong>und</strong> Lösungsgeschäft“<br />
65%<br />
Projekt-/<br />
Lösungsgeschäft<br />
35%<br />
Produktgeschäft<br />
Anforderungen an den Ingenieur:<br />
Planung, Modellierung, Realisierung,<br />
Charakterisierung <strong>und</strong> Anwendung von<br />
Systemen<br />
Quelle: SIEMENS
Schweißroboter (Automobilindustrie)<br />
Beispiel: Robotik<br />
Automatisierungstechnik:<br />
� Bahnplanung <strong>und</strong><br />
Trajektorienerzeugung<br />
� Modellbildung <strong>und</strong> Datenfusion<br />
Mess- <strong>und</strong> Prüftechnik:<br />
� Sensoren <strong>und</strong> Messsysteme<br />
� Messunsicherheitsbudget<br />
Regelungs- <strong>und</strong><br />
Steuerungstheorie:<br />
� Regelung nichtlinearer Systeme<br />
� Überwachung (Beobachtermodell)<br />
Prozessleittechnik:<br />
� Mensch-Maschine-Kommunikation<br />
� Modellierung <strong>und</strong> Simulation<br />
komplexer Prozesse
Fachgebiet: Automation, Measurement & Control<br />
Organisation & Personen<br />
Automatisierungs-<br />
technik<br />
AT<br />
Janschek<br />
Prozessleit-<br />
technik<br />
PLT<br />
Urbas<br />
Mess- <strong>und</strong><br />
Prüftechnik<br />
PMP<br />
Czarske<br />
Regelungs- <strong>und</strong><br />
Steuerungstheorie<br />
RST<br />
Röbenack<br />
<strong>Studienrichtung</strong> AMR 2012 (c) Folie 7
http://www.et.tu-dresden.de/etit/index.php?id=228
http://www.et.tu-dresden.de/etit/index.php?id=228
http://www.et.tu-dresden.de/etit/index.php?id=228
http://www.et.tu-dresden.de/etit/index.php?id=228
http://www.et.tu-dresden.de/etit/index.php?id=228
Hauptseminar AMR<br />
5. Semester, 2 SWS, 4 LP<br />
Thema:<br />
„Parkassistenzsystem mit frei wählbarem Autonomiegrad“<br />
Aufgabe: Entwurf <strong>und</strong> Implementierung eines Navigationsmoduls<br />
<strong>zur</strong> Positions- <strong>und</strong> Orientierungsbestimmung eines NXT-<br />
Fahrzeugs <strong>und</strong> eines Parklücken-Detektions- <strong>und</strong><br />
Vermessungsmoduls (in Anlehnung an<br />
Fahrerassistenzsysteme).<br />
Orga: Jeweils 6 Studierende arbeiten<br />
im Team an der Aufgabe. Es<br />
findet eine gemeinsame<br />
Betreuung durch die vier AMR-<br />
Lehrstühle statt.<br />
AMR stellt Projektanleitungen für<br />
die Teilaufgaben <strong>zur</strong> Verfügung.<br />
NXT-Roboter<br />
(LEGO Mindstorms)
Hauptseminar AMR<br />
5. Semester, 2 SWS, 4 LP<br />
Ziel ist es, dass das Fahrzeug dem Straßenverlauf folgt, eine passende<br />
Parklücke identifiziert <strong>und</strong> den Parkvorgang eigenständig durchführt.
Hauptseminar AMR<br />
5. Semester, 2 SWS, 4 LP<br />
Thema: „Parkassistenzsystem mit frei wählbarem Autonomiegrad“<br />
• Perception / Sensorik<br />
- Linienverfolgungssensor<br />
- Abstandssensoren (Triangulation)<br />
- Odometrie (optische Maus, Rad-Encoder)<br />
• Bewegungsplanung <strong>und</strong> Navigation<br />
- Parklückenidentifizierung & -vermessung<br />
- Einparkalgorithmus<br />
• Regelungstechnik<br />
- Drehzahlregelung<br />
- Bahnregelung<br />
• Mensch-Maschine-Interface<br />
- Systemüberwachung<br />
- Nutzersteuerung NXT-Roboter
Fachgebiet: Automation, Measurement & Control<br />
Forschungsprofile<br />
Regelung, Steuerung, Überwachung<br />
Nichtlineare Systeme, hybride Systeme, Totzeitsysteme, Systeme mit örtlich<br />
verteilten Parametern, Lenkung & Navigation von autonomen Fahrzeugen<br />
Automation Systems Engineering<br />
Engineering für verteilte, vernetzte, heterogene AT-Systeme: Modellierung,<br />
Simulation, Leistungsbewertung, IT-basierte Dienste, Frontloading & Concurrent<br />
Engineering, Asset Management<br />
Intelligente Perzeption<br />
Höhere perzeptive Fähigkeiten: visuelle Perzeption <strong>und</strong> Navigation, 3D-<br />
Umweltmodellierung, Datenfusion, Beobachter, Filter, Fehlerdetektoren, Optische<br />
Rechnertechnologie<br />
Messsystemtechnik<br />
Laser- <strong>und</strong> Ultraschallmesstechnik unter Einsatz neuer Signal- <strong>und</strong> Bildverarbeitungstechniken<br />
(FPGA, DSP), Systemtheoretische Modellierung, Simulation<br />
Smart Sensors<br />
In-situ on-line Sensoren für industrieorientierte Anwendungen: Strahltriebwerke,<br />
Windkraftanlagen, Brennstoffzellen, Biomedizin, Elektrochemie, etc.<br />
Mensch-Maschine Interaktion<br />
Mobile Mensch-Maschine-Interaktion, sicherheitskritische Systeme, Augmented<br />
Vision&Reality, Mensch-Roboter-Interaktion, menschl. Informationsverarbeitung<br />
Komplexe<br />
heterogene<br />
Systeme<br />
Mechatronik<br />
Robotik<br />
Raumfahrt<br />
Verfahrenstechnik<br />
Fertigungstechnik<br />
Strömungstechnik<br />
Neu: Energie,<br />
Ges<strong>und</strong>heit,<br />
Verkehr<br />
Folie 20
<strong>Fakultät</strong> ETIT Institut für Automatisierungstechnik, Professur für Automatisierungstechnik<br />
Professur für<br />
Automatisierungstechnik<br />
Prof. Dr. techn. Klaus Janschek
<strong>Fakultät</strong> <strong>Elektrotechnik</strong> <strong>und</strong> Informationstechnik � Lehrstuhl Automatisierungstechnik � Prof. Dr.techn. Klaus Janschek<br />
Diplom-/Masterstudiengänge<br />
• <strong>Elektrotechnik</strong><br />
• Mechatronik<br />
• Informationssystemtechnik<br />
• Wirtschaftsingenieure<br />
• Maschinenbau (Luft- <strong>und</strong> Raumfahrt)<br />
Lehrveranstaltungen<br />
• Automatisierungstechnik (Gr<strong>und</strong>studium, 400 Stud.)<br />
• Ereignisdiskrete Systeme 1, 2 (+P, 150 Stud.)<br />
• Modellbildung & Simulation (+P)<br />
• Systementwurf (+P)<br />
• Industrielle AT : Entwurf eingebetteter Systeme<br />
• Internet in der AT, Teleautomation (P), XML- <strong>und</strong> Web@AT<br />
• Mechatronische Systeme, Regelung von Mehrkörpersystemen<br />
• Steuerung von Robotersystemen<br />
• Satellitenlageregelung<br />
• Seminare: Mobile Robotik, Modellbildung & Simulation<br />
Forschung LS-AT<br />
Lehre<br />
ca. 35 Diplom-/Master-/<br />
Studienarbeiten p.a.
<strong>Fakultät</strong> <strong>Elektrotechnik</strong> <strong>und</strong> Informationstechnik � Lehrstuhl Automatisierungstechnik � Prof. Dr.techn. Klaus Janschek<br />
Forschung LS-AT<br />
Systementwurf<br />
Modellbasierter Systementwurf<br />
Systemmodellierung UML, XML<br />
RAMS Entwurfsverifikation<br />
Modellbildung <strong>und</strong> Simulation<br />
Geschlossene<br />
Stoffkreisläufe<br />
Modellbildung & Simulation<br />
Automatisierter<br />
Prozessbetrieb<br />
Prozessmesstechnik<br />
Mikroverfahrenstechnik<br />
Industrielle<br />
Automatisierung<br />
Informationsbasierte<br />
Automatisierung<br />
Internettechnologien<br />
Modellgetriebene Technologien<br />
Aspektorientierte Technologien<br />
Navigation<br />
Bildgestützte Navigation<br />
Lokalisierung/Kartenerstellung/SLAM<br />
Datenfusion<br />
Mobile Robotik<br />
Steuerungsarchitekturen<br />
Sensorik<br />
Bewegungssteuerung<br />
Bahnplanung<br />
Forschung<br />
Optische Rechner<br />
Optomechatronik<br />
Optische Fourier-Prozessoren<br />
Optische Korrelatoren<br />
Smart Imaging Systems<br />
Oberflächeninspektion<br />
Robotik &<br />
Mechatronik
<strong>Fakultät</strong> <strong>Elektrotechnik</strong> <strong>und</strong> Informationstechnik � Lehrstuhl Automatisierungstechnik � Prof. Dr.techn. Klaus Janschek<br />
Optical<br />
Correlator<br />
Schätzung<br />
&<br />
Fusion<br />
Position &<br />
Orientierung<br />
Überblick Lehre <strong>und</strong> Forschung LS-AT<br />
Bildgestützte Navigation<br />
• Satellitennavigation durch Bildbewegungsverfolgung<br />
• Planetary Lander Navigation<br />
• Bildnavigation für Wettersatelliten<br />
Mono<br />
Camera • Spacecraft Rendezvous Navigation � Labor<br />
Position<br />
Orientation<br />
Optical Flow<br />
DEM – Digital Elevation Model<br />
Kooperationen<br />
• Visual Servoing / Lokalisierung /<br />
SLAM mittels optischen Fluss<br />
• Navigation in nicht kooperativer<br />
Umgebung<br />
Informationsfusionierung<br />
• Mengenbasierte Schätzfilter<br />
• Lokalisierungsverfahren<br />
• European Space Agency<br />
• EADS Astrium, Toulouse (France)<br />
• EADS Astrium, Friedrichshafen<br />
• Industry<br />
Navigation<br />
� Labor
<strong>Fakultät</strong> <strong>Elektrotechnik</strong> <strong>und</strong> Informationstechnik � Lehrstuhl Automatisierungstechnik � Prof. Dr.techn. Klaus Janschek<br />
2000 - 2004<br />
Satellite Visual<br />
Orbital Navigation<br />
Forschung LS-AT<br />
AUX Cam<br />
Guidance-Navigation-Control - Projects<br />
2007 - …<br />
Bio Inspired Visual<br />
Navigation<br />
2006 - 2009<br />
Geostationary<br />
Image Navigation<br />
DAAD<br />
2004 - 2009 ….<br />
Optical Flow<br />
Landing Navigation<br />
2008 - …<br />
Visual Rendezvous<br />
Navigation<br />
RV-SLAM<br />
+ 3D Recon-<br />
struction<br />
Lander<br />
Orbiter<br />
� Labor<br />
Okt-11
<strong>Fakultät</strong> <strong>Elektrotechnik</strong> <strong>und</strong> Informationstechnik � Lehrstuhl Automatisierungstechnik � Prof. Dr.techn. Klaus Janschek<br />
S3ARV – Small & Safe Space Autonomous Robot Vehicles<br />
• Vollautonome Landung eines Flugroboters in unbekanntem Terrain für<br />
extraterrestrische (Planetary Landing) <strong>und</strong> terrestrische Anwendungen (z.B:<br />
Katastrophenhilfe)<br />
• Laufzeit: 2012-2014, Verb<strong>und</strong>projekt<br />
mit Universität Stuttgart (iFR)<br />
• Förderung: BMWi (DLR)<br />
Forschung LS-AT<br />
Universität Stuttgart<br />
Institut für Flugmechanik <strong>und</strong> Flugregelung<br />
Neu!<br />
„small+safe“ <strong>und</strong> SPLAM<br />
Terrestrische<br />
Demonstration<br />
mit Octocopter<br />
Jan-12
<strong>Fakultät</strong> <strong>Elektrotechnik</strong> <strong>und</strong> Informationstechnik � Lehrstuhl Automatisierungstechnik � Prof. Dr.techn. Klaus Janschek<br />
Forschung LS-AT<br />
• Industriepartner<br />
Steuerungsarchitekturen<br />
• Aktionsprimitive, Verhaltensbasierte Architektur<br />
Sensorik<br />
• Sensorsysteme mit minimalen Hardwarekomponenten<br />
• Globale Lokalisierungssysteme (Ultraschall/Infrarot)<br />
Bewegungssteuerung<br />
• Schwungmassenantriebe<br />
• Antriebsregelung<br />
• Bahnregelung<br />
Bahnplanung<br />
Mobile Robotik<br />
• kartenbasierte Planungsalgorithmen<br />
Zum Test stehen verschiedene mobile autonome Plattformen <strong>zur</strong><br />
Verfügung.<br />
Kooperationen
Bild<br />
in<br />
SMARTSCAN<br />
SMARTSCAN<br />
verzerrtes<br />
Rohbild<br />
<strong>Fakultät</strong> <strong>Elektrotechnik</strong> <strong>und</strong> Informationstechnik � Lehrstuhl Automatisierungstechnik � Prof. Dr.techn. Klaus Janschek<br />
Optischer Fourierprozessor<br />
Laserdiode<br />
Linsen<br />
R ä umlicher<br />
Lichtmodulator<br />
F<br />
Forschung LS-AT<br />
Bildsensor<br />
Bildbewegungs -<br />
daten<br />
bis 5000<br />
Korrelationen/s<br />
Spektrums -<br />
bild<br />
out<br />
SMART SMART SCAN SCAN<br />
korrigiertes<br />
Bild<br />
Optische Rechner � Optomechatronik<br />
Kooperationen<br />
Optische Fourierprozessoren <strong>und</strong><br />
Korrelatoren<br />
• Entwicklung von Optik, Elektronik (FPGA), Software<br />
• Patentierte Selbstkalibrierung<br />
Smart Imaging Systems<br />
• opto-elektronische Bildstabilisierung (SmartScan)<br />
• opto-mechatronische Bildstabilisierung (visual servoing)<br />
• Entwicklung von Optik, Elektronik (FPGA), Software<br />
Oberflächeninspektion<br />
• Anwendungsorientierte Spektralanalyse <strong>und</strong> Klassifikation<br />
• Entwicklung von Optik, Elektronik (FPGA), Software<br />
• European Space Agency<br />
• Papiertechischen Stiftung (PTS), Heidenau<br />
• RUAG, Zürich<br />
� Labor<br />
Jan-12
<strong>Fakultät</strong> <strong>Elektrotechnik</strong> <strong>und</strong> Informationstechnik � Lehrstuhl Automatisierungstechnik � Prof. Dr.techn. Klaus Janschek<br />
Forschung LS-AT<br />
Systementwurf<br />
Modellbasierter Systementwurf<br />
Systemmodellierung UML, XML<br />
RAMS Entwurfsverifikation<br />
Modellbildung <strong>und</strong> Simulation<br />
Geschlossene<br />
Stoffkreisläufe<br />
Modellbildung & Simulation<br />
Automatisierter<br />
Prozessbetrieb<br />
Prozessmesstechnik<br />
Labor<br />
Mikroverfahrenstechnik<br />
Industrielle<br />
Automatisierung<br />
Informationsbasierte<br />
Automatisierung<br />
Internettechnologien<br />
Labor<br />
Modellgetriebene Technologien<br />
Aspektorientierte Technologien<br />
Navigation<br />
Bildgestützte Navigation<br />
Lokalisierung/Kartenerstellung/SLAM<br />
Datenfusion<br />
Mobile Robotik<br />
Steuerungsarchitekturen<br />
Sensorik<br />
Bewegungssteuerung<br />
Bahnplanung<br />
Forschung<br />
Optische Rechner<br />
Optomechatronik<br />
Optische Fourier-Prozessoren<br />
Optische Korrelatoren<br />
Smart Imaging Systems<br />
Oberflächeninspektion<br />
Labor<br />
Labor<br />
Labor<br />
Robotik &<br />
Mechatronik<br />
Jan-12
<strong>Fakultät</strong> ETIT Institut für Automatisierungstechnik, Professur für Prozessleittechnik<br />
Professur für<br />
Prozessleittechnik<br />
Prof. Dr.-Ing. habil. Leon Urbas
Prozessführung<br />
• Mittel <strong>und</strong> Methoden <strong>zur</strong> zielgerichteten Planung <strong>und</strong><br />
Ausführung von Prozessführungsstrategien für den sicheren<br />
<strong>und</strong> wirtschaftlichen Betrieb von technischen Prozessen.<br />
Wissensgebiet der Prozessführung<br />
technischer<br />
Prozess<br />
Automatisierungs-<br />
system<br />
Prozess-<br />
Automatisierung<br />
Prozessleittechnik<br />
09.05.2012 Folie 31
Arbeitsgebiete<br />
chemical/<br />
physical<br />
process<br />
Integrated PCS<br />
Engineering<br />
Quality related<br />
Systems (PCS)<br />
Safety related<br />
System (SIS)<br />
Process Control Systems Engineering<br />
Human Factors<br />
Engineering<br />
09.05.2012 Folie 32
Lehrmodule<br />
Mikrorechentechnik<br />
Algorithmen, Datenstrukturen, Programmiersprachen<br />
WPFS<br />
Wissensbasierte<br />
Prozessführungssysteme<br />
Prozessleittechnik<br />
Aufgaben, Architekturen, Dienste, Methoden<br />
CAE-PA<br />
Integriertes Engineering<br />
von AT-Systemen<br />
MMS<br />
Mensch-Maschine-<br />
Systemtechnik<br />
09.05.2012 Folie 33
Kompetenzfelder PLT<br />
Integriertes PLT<br />
Engineering<br />
PLT Engineering<br />
(COMOS, InterGraph, PCS 7, Phoenix Contact)<br />
Human Factors<br />
Engineering<br />
Usability Engineering<br />
Human Factors, Evaluationsmethodik, Inferenzstatistik<br />
Formale Beschreibung, Modellierung, Modellgetriebene Softwareentwicklung<br />
Daten & Information Kommunikation & Workflow Wissen & Verhalten<br />
Middleware in der Prozessautomatisierung<br />
Kommunikationsengineering Mobile Informationssysteme<br />
Modellierung <strong>und</strong> Simulation stochastischer Prozesse<br />
Zuverlässigkeit Signalerkennungstheorie<br />
09.05.2012 Folie 34
Interactive Body Area Networks (InteractBAN)<br />
(Ziegler, Urbas IMC`09; Ziegler, Pfeffer, Urbas TEI`11;<br />
Ziegler, Urbas RFID-TA`11, Ziegler u.a. MobileHCI`11)<br />
• Ziel<br />
– Optimierung der MMS für<br />
mobile Systeme in<br />
industriellen Anwendungen<br />
• Lösungsansatz<br />
– Entwurf <strong>und</strong> Evaluation von<br />
Patterns für Interaktions-<br />
<strong>und</strong> Schnittstellendesign<br />
– BAN von optimierten Ein-<br />
<strong>und</strong> Ausgabegeräten<br />
– Adaptive GUI entsprechend<br />
des aktiven InteractBAN<br />
Maintenance<br />
Data<br />
Maintenance<br />
TUD MInf<br />
09.05.2012 35
NetGen:X<br />
(Doherr, Schmidt, Urbas WFCS´10; Doherr, Stöß, Urbas atp edition 54(5);<br />
Stöß, Doherr, Urbas WFCS´12)<br />
• Ziel<br />
– Automatische Generierung<br />
von Kommunikationsstrukturen<br />
aus<br />
Planungsdaten<br />
• Lösungsansatz<br />
– Beschreibung der<br />
Anforderungen als Graph<br />
– Formale Beschreibung<br />
der technologischen<br />
Randbedingungen<br />
– Formale Beschreibung<br />
von Planungsregeln<br />
GMA 5.16<br />
09.05.2012 Folie 36
autoHMI<br />
(Doherr et al. IEPV´11; Urbas, Doherr CSAE´11; Urbas et al. INDIN´11;<br />
Doherr et al. atp edition 53(11); Urbas, Stöß, Doherr MathMod‘12,<br />
Obst et al. AUTOMATION´12)<br />
• Ziel<br />
– Generierung von HMIs<br />
aus Planungsdaten<br />
• Lösungsansatz<br />
– Modellgetriebenes<br />
Software Engineering<br />
– aCAE: Tasks & Concepts<br />
– aHMI: abstraktes HMI<br />
Modells<br />
– Formalisierung von<br />
Layoutexpertise als<br />
Graphmanipulation<br />
TUD AT<br />
09.05.2012 Folie 37
Modularisierung<br />
(Urbas, Doherr, Scholl IEPV´10; Obst, Urbas PAAT’12;<br />
Obst et al. EKA´12; Krause, Urbas PSAM´12)<br />
• Ziel<br />
– CBR <strong>zur</strong> Unterstützung bei Auswahl <strong>und</strong><br />
Parametierung von Modulen<br />
– Bestimmung der Sicherheit/Zuverlässigkeit von<br />
modularen Anlagen<br />
• Lösungsansatz<br />
– Informationsmodellierung<br />
– Ähnlichkeitsmetriken<br />
– Gewerkeübergreifende<br />
Lösungsmuster<br />
– Modellierung als Graph:<br />
• Strukturähnlichkeit<br />
• Manipulation<br />
GEA: Pharmazeutische Biotechnologie -<br />
Downstream-Prozesse mit Zentrifugen<br />
<strong>und</strong> Package Units<br />
09.05.2012 Folie 38
<strong>Fakultät</strong> <strong>Elektrotechnik</strong> <strong>und</strong> Informationstechnik Institut für Regelungs- <strong>und</strong> Steuerungstheorie<br />
Professur für<br />
Regelungs- <strong>und</strong> Steuerungs-<br />
theorie<br />
Prof. Dr.-Ing. habil. Dipl.-Math. Klaus Röbenack
Regelung, Steuerung, Überwachung<br />
Entwurfsmethoden für die<br />
Forschung<br />
� Steuerung (Trajektoriengenerierung)<br />
� Regelung (Stabilisierung, Störunterdrückung)<br />
� Überwachung (Beobachter, Filter, Fehlererkennung)<br />
mit speziellem Fokus auf die Systemklassen<br />
� nichtlineare endlich-dimensionale Systeme<br />
� hybride Systeme (zeitkontinuierlich, ereignisdiskret)<br />
� Totzeitsysteme (linear, nichtlinear)<br />
� Systeme mit örtlich verteilten Parametern<br />
Folie 40
Lehre<br />
Folie 41
Praktika<br />
� Regelungstechnisches Praktikum I <strong>und</strong> II<br />
� Projekte (Module ET 12 13 11 <strong>und</strong> ET 12 13 12)<br />
Folie 42
Pilotanwendungen (1/2)<br />
Modellbildung <strong>und</strong> Regelung für mechatronische Systeme<br />
Leistungselektronische Schaltungen Magnetische Lagerungen<br />
Unteraktuierte Manipulatoren<br />
Regelung <strong>und</strong> Lageschätzung von Mehrachsfahrzeugen<br />
<strong>und</strong> Lastzügen<br />
Folie 43
Pilotanwendungen (2/2)<br />
Regelung <strong>und</strong> Beobachtung von Kristallzüchtungsprozessen<br />
Folie 44
Fak. <strong>Elektrotechnik</strong> & Informationstchnik Professur für Mess- <strong>und</strong> Prüftechnik<br />
Professur für Mess- <strong>und</strong><br />
Prüftechnik<br />
Prof. Dr.-Ing. habil. Jürgen Czarske
Innovative Messsystem- <strong>und</strong> Sensortechnik<br />
5. Schaltungstechnik<br />
4. Konstruktion<br />
3. Simulation<br />
6. Signalverarbeitung<br />
Messsystem<br />
2. Modellierung<br />
<strong>und</strong> Theorie<br />
7. Kalibrierung<br />
Messkampagnen<br />
1. Physikalischer Effekt<br />
8. Anwendung<br />
im Labor <strong>und</strong><br />
im Versuchsfeld
Technische Optik:<br />
Mikro- <strong>und</strong> Nanooptik / aktive<br />
<strong>und</strong> adaptive Optik / robuste<br />
faseroptische Sensoren<br />
Forschungsprofile 1/2<br />
Signalverarbeitungstechnik:<br />
On-line Messungen für<br />
Regelungen / Messtheorie für<br />
verrauschte Signale / smart<br />
sensors (modellbasiertes Messen)
Strömungsmesstechnik:<br />
Berührungslose in-situ<br />
Messungen mit Ultraschallwellen<br />
<strong>und</strong> mit Lichtwellen (Auflösungen<br />
im Mikrometerbereich)<br />
Forschungsprofile 2/2<br />
Prozessmesstechnik:<br />
Berührungslose in-situ Messungen<br />
von Objektoberflächen für die<br />
Prozessüberwachung <strong>und</strong><br />
Prozessregelung
Ultraschall-Doppler-Array-Velocimeter:<br />
Bildgebende Strömungsmessung für die Magnetohydrodynamik<br />
(Stahl- <strong>und</strong> Halbleiterherstellung)<br />
Analoge <strong>und</strong> digitale Schaltungen; Software-Entwicklung (Matlab); FPGA, DSP:<br />
arbitrary<br />
function<br />
generator<br />
RF power<br />
amplifier<br />
RF<br />
signal<br />
trigger<br />
signal<br />
transmitting<br />
multiplexer<br />
...<br />
microcontroller<br />
control circuit<br />
transmitting / receiving switch<br />
transmitting / receiving switch<br />
transmitting / receiving switch<br />
... ...<br />
transmitting / receiving switch<br />
...<br />
receiving multiplexer<br />
1<br />
2<br />
3<br />
... 25<br />
ultraso<strong>und</strong><br />
line<br />
array<br />
4-channel<br />
data aquisition<br />
card<br />
for PC<br />
Software:<br />
crosscorrelation<br />
and<br />
visualisation
Flow Mapping of Vortices<br />
Liquid metal measurements (Stationary RMF)<br />
magnetically driven<br />
vortex<br />
ultraso<strong>und</strong><br />
transducer<br />
line array<br />
Y X<br />
cubic vessel<br />
filled with GaInSn<br />
measurement<br />
plane<br />
Preliminary experiments:<br />
2d-1c flow measurement<br />
Applied RMF:<br />
– Angular frequency ω = 2π*50 Hz<br />
– Magnetic flux density B = 4.2 mT<br />
measured velocity component<br />
Clockwise vortex
Lehre <strong>zur</strong> Messsystemtechnik <strong>und</strong> Sensorik<br />
Messsystemtechnik<br />
6. Semester, 2 SWS<br />
(im Modul Prozessleittechnik)<br />
Mess- <strong>und</strong> Sensortechnik<br />
5. Semester, 4 SWS<br />
(inkl. Praktikum)<br />
Gr<strong>und</strong>züge des Messens<br />
4. Semester, 2 SWS<br />
(im Modul Mess- <strong>und</strong> Automatisierungstechnik)<br />
�f<br />
�y � y � y � � �x<br />
n<br />
�<br />
w i<br />
�x<br />
i�1<br />
i
Modul Photonische Messsystemtechnik<br />
9. Semester, 6 SWS<br />
Faseroptische Messtechnik 2 SWS (1/1/0), 9.S., 2 LP<br />
Lasermesssysteme f. d. Fluidtechnik 2 SWS (2/0/0), 9.S., 3 LP<br />
Messsystemtheorie 1 SWS (1/0/0), 9.S., 1 LP<br />
Projekt Photonische Messsystemtechnik 1 SWS (0/1/0), 9.S., 1 LP<br />
Modul Lasersensorik<br />
8. Semester, 6 SWS<br />
Lasermesstechnik 3 SWS (2/1/0), 8.S., 4 LP<br />
Mechatronische Lasersensoren 2 SWS (2/0/0), 8.S., 2 LP<br />
Praktikum Lasersensorik 1 SWS (0/0/1), 8.S., 1 LP
Impressionen aus dem Labor <strong>und</strong> Versuchsfeld<br />
Einbindung von Studien- <strong>und</strong> Diplomarbeiten in die Projektarbeiten