Musterlösung zur 8. ¨Ubung Mechanik II SS 07 Aufgabe 1:
Musterlösung zur 8. ¨Ubung Mechanik II SS 07 Aufgabe 1:
Musterlösung zur 8. ¨Ubung Mechanik II SS 07 Aufgabe 1:

Erfolgreiche ePaper selbst erstellen
Machen Sie aus Ihren PDF Publikationen ein blätterbares Flipbook mit unserer einzigartigen Google optimierten e-Paper Software.
<strong>Musterlösung</strong> <strong>zur</strong> <strong>8.</strong> Übung <strong>Mechanik</strong> <strong>II</strong> <strong>SS</strong> <strong>07</strong><br />
<strong>Aufgabe</strong> 1:<br />
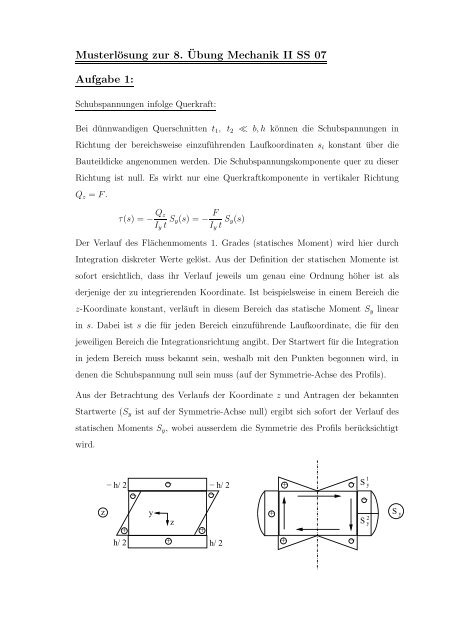
Schubspannungen infolge Querkraft:<br />
Bei dünnwandigen Querschnitten t1, t2 ≪ b, h können die Schubspannungen in<br />
Richtung der bereichsweise einzuführenden Laufkoordinaten si konstant über die<br />
Bauteildicke angenommen werden. Die Schubspannungskomponente quer zu dieser<br />
Richtung ist null. Es wirkt nur eine Querkraftkomponente in vertikaler Richtung<br />
Qz = F.<br />
τ(s) = − Qz<br />
Iy t Sy(s) = − F<br />
Iy t Sy(s)<br />
Der Verlauf des Flächenmoments 1. Grades (statisches Moment) wird hier durch<br />
Integration diskreter Werte gelöst. Aus der Definition der statischen Momente ist<br />
sofort ersichtlich, dass ihr Verlauf jeweils um genau eine Ordnung höher ist als<br />
derjenige der zu integrierenden Koordinate. Ist beispielsweise in einem Bereich die<br />
z-Koordinate konstant, verläuft in diesem Bereich das statische Moment Sy linear<br />
in s. Dabei ist s die für jeden Bereich einzuführende Laufkoordinate, die für den<br />
jeweiligen Bereich die Integrationsrichtung angibt. Der Startwert für die Integration<br />
in jedem Bereich muss bekannt sein, weshalb mit den Punkten begonnen wird, in<br />
denen die Schubspannung null sein muss (auf der Symmetrie-Achse des Profils).<br />
Aus der Betrachtung des Verlaufs der Koordinate z und Antragen der bekannten<br />
Startwerte (Sy ist auf der Symmetrie-Achse null) ergibt sich sofort der Verlauf des<br />
statischen Moments Sy, wobei ausserdem die Symmetrie des Profils berücksichtigt<br />
wird.<br />
z<br />
− h/ 2 − − h/ 2<br />
+<br />
−<br />
−<br />
y<br />
z<br />
+<br />
+<br />
h/ 2 + h/ 2<br />
+<br />
+<br />
−<br />
−<br />
1<br />
S y<br />
−<br />
S y 2<br />
S y
Dann brauchen nur noch die folgenden Randwerte durch Integration bestimmt zu<br />
werden, wobei die Integrationsrichtung durch das Vorzeichen berücksichtigt werden<br />
muss.<br />
Sy(s) =<br />
S 1 y =<br />
�s<br />
0<br />
b/2<br />
�<br />
0<br />
S 2 y = S1 y +<br />
z(¯s) t d¯s<br />
�<br />
− h<br />
�<br />
2<br />
�<br />
h/2<br />
Flächenmoment 2. Grades:<br />
Iy = 2 t1 h3 + 2 bt2<br />
12<br />
0<br />
t2 ds = − bht2<br />
4<br />
(−s) t1 ds = − bht2<br />
4<br />
� h<br />
2<br />
� 2<br />
= t2 h 2<br />
6<br />
− t1<br />
2<br />
(2 h + 3 b)<br />
� �2 h<br />
= −<br />
2<br />
h<br />
8 (2 bt2<br />
h t2<br />
+ h t1) = − (b + h)<br />
4<br />
Damit ergibt sich der folgende Schubspannungsverlauf infolge Querkraft.<br />
−<br />
− +<br />
− +<br />
τ 1 Q<br />
τ 2 Q<br />
+<br />
τ 3<br />
Q<br />
τ<br />
τ 1 Q =<br />
=<br />
τ2 Q = τ1 t2<br />
Q<br />
t1<br />
τ 3 Q =<br />
= 3 F (b + h)<br />
6 F<br />
t2 h 2 (2 h + 3 b) t2<br />
3 F b<br />
2 t2 h (2 h + 3 b)<br />
=<br />
bht2<br />
4<br />
3 F b<br />
4 t2 h (2 h + 3 b)<br />
6 F<br />
t2 h 2 (2 h + 3 b) t1<br />
4 t2 h (2 h + 3 b)<br />
h t2<br />
4<br />
(b + h)
Schubspannungen infolge Torsion:<br />
Bei dem doppeltsymmetrischen Querschnitt fallen Schubmittelpunkt und Flächen-<br />
schwerpunkt zusammen. Allerdings greift die wirkende Querkraft nicht im Schub-<br />
mittelpunkt an sondern um b/2 versetzt, wodurch das Torsionsmoment MT hervor-<br />
gerufen wird.<br />
MT =<br />
F b<br />
2<br />
Die daraus resultierende Schubspannung lässt sich bereichsweise über die 1. Bredt’sche<br />
Formel berechnen.<br />
τi = MT<br />
2 ti A<br />
F b F<br />
= =<br />
4 ti bh 4 ti h<br />
Damit lässt sich sofort der Schubspannungsverlauf infolge Torsion angeben.<br />
τ 1<br />
T<br />
τ 2 T<br />
+<br />
τ 2 T<br />
+<br />
+<br />
M = F b / 2<br />
T<br />
<strong>II</strong><br />
I<br />
+<br />
τ 1<br />
T<br />
τ<br />
τ 1 T<br />
τ 2 T<br />
F F<br />
= =<br />
4 t1 h 8 t2 h<br />
= F<br />
4 t2 h<br />
Die maximale Schubspannung herrscht dann je nach dem Verhältnis von b und h an<br />
der Stelle I oder an der Stelle <strong>II</strong>. Die Schubspannungen aus Querkraft und Torsion<br />
dürfen bei dünnwandigen Querschnitten superponiert werden.<br />
τI = τ 1 T + τ3 Q<br />
τ<strong>II</strong> = τ 2 T + τ1 Q<br />
F 3 F (b + h) F 8 h + 9 b<br />
= + =<br />
8 t2 h 4 t2 h (2 h + 3 b) 8 t2 h 2 h + 3 b<br />
F<br />
=<br />
4 t2 h +<br />
3 F b F 2 h + 9 b<br />
=<br />
2 t2 h (2 h + 3 b) 4 t2 h 2 h + 3 b
<strong>Aufgabe</strong> 2:<br />
1. Bredt’sche Formel: MT = 2 τi ti A ; A =<br />
τ1 = MT<br />
2 s1 A<br />
τ2 = MT<br />
2 s2 A<br />
4 MT N<br />
= = 4974<br />
2 s1 π d2 cm2 4 MT N<br />
= = 2984<br />
2 s2 π d2 cm2 2. Bredt’sche Formel: D = MT<br />
4 G A2 ⇒ D = τi<br />
�<br />
si du<br />
du = r dϕ<br />
2 G A t(u)<br />
� du<br />
t(u) =<br />
2π<br />
3<br />
�<br />
0<br />
⇒ D = ϕ<br />
ℓ<br />
r dϕ<br />
+<br />
s1<br />
�2π<br />
2π<br />
3<br />
= MT<br />
4 G A 2<br />
⇒ ϕ = 16 MT π d ℓ<br />
12 G π 2 d 4<br />
⇒ ϕ = 0, 784 ◦<br />
r dϕ<br />
s2<br />
= 2 π r<br />
� du<br />
t(u)<br />
� 1<br />
s1<br />
3 s1<br />
+ 2<br />
�<br />
s2<br />
+ 4 π r<br />
= MT<br />
4 G A 2<br />
� du<br />
t(u)<br />
3 s2<br />
π d<br />
3<br />
ϕ<br />
= π d<br />
� 1<br />
r<br />
3<br />
s1<br />
π d2<br />
4<br />
� 1<br />
s1<br />
+ 2<br />
�<br />
s2<br />
00 11<br />
00 11<br />
00 11<br />
u<br />
+ 2<br />
�<br />
du<br />
s2
<strong>Aufgabe</strong> 3:<br />
Da die Schubspannungen vernachlässigt werden sollen und weder Längskraft noch<br />
Torsion auftreten, muss nur die Biegespannung berechnet werden:<br />
σb(x, y ′ , z ′ Mb,y ′(x)<br />
) =<br />
Iy ′<br />
z ′ −<br />
Mb,z ′(x)<br />
Berechnung der Hauptflächenmomente Iy ′, Iz ′ und der Hauptachsen y’,z’<br />
Iz ′<br />
Zunächst werden für die drei rechteckigen Teilflächen, aus denen der Z-Querschnitt<br />
zusammengesetzt ist, die Flächenmomente 2. Grades Iη,I, Iη,<strong>II</strong>, Iη,<strong>II</strong>I und Iζ,I, Iζ,<strong>II</strong>,<br />
Iζ,<strong>II</strong>I bezüglich der jeweiligen Teilflächenschwerpunkte bestimmt. Mithilfe des Sat-<br />
zes von Steiner können diese Einzelflächenmomente durch folgende Gleichungen auf<br />
das KOS im Gesamtschwerpunkt transformiert werden, wobei yS1, yS2 die jeweiligen<br />
Abstände der Einzelflächenschwerpunkte in y-Richtung und zS1, zS2 die jeweiligen<br />
Abstände der Einzelflächenschwerpunkte in z-Richtung vom Gesamtflächenschwer-<br />
punkt sind.<br />
Iy = Iη + z 2 S A ,<br />
����<br />
Iz = Iζ + y<br />
Steiner<br />
2 S A<br />
����<br />
Steiner<br />
Bestimmung des Gesamtflächenschwerpunkts:<br />
�<br />
(Ai ¯yi)<br />
¯yS =<br />
A<br />
y ′<br />
, Iyz = Iη ζ + yS zS A<br />
¯yS = a2 · 0, 5 a + 3 a2 · 0, 5 a + 4 a2 · (−0, 5 a)<br />
8 a2 = 0<br />
�<br />
(Ai ¯zi)<br />
¯zS =<br />
A<br />
¯zS = a2 · (−1, 5 a) + 3 a 2 · (−0, 5 a) + 4 a 2 · 2 a<br />
8 a 2<br />
� �� �<br />
Steiner<br />
y<br />
= 0, 625 cm<br />
η 1<br />
η2<br />
ζ 2<br />
y<br />
η 3<br />
ζ<br />
1<br />
ζ<br />
3<br />
I<br />
a a<br />
z, z<br />
a<br />
<strong>II</strong><br />
<strong>II</strong>I<br />
a<br />
a<br />
4a
Flächenmomente 2. Grades bezüglich des Schwerpunkts:<br />
Iy = Iη,I + AI z 2 S1 + Iη,<strong>II</strong> + A<strong>II</strong> z 2 S2 + Iη,<strong>II</strong>I + A<strong>II</strong>I z 2 S3<br />
Iz = Iζ,I + AI y 2 S1 + Iζ,<strong>II</strong> + A<strong>II</strong> y 2 S2 + Iζ,<strong>II</strong>I + A<strong>II</strong>I y 2 S3<br />
Iyz = Iη ζ,I + AI yS1 zS1 + Iη ζ,<strong>II</strong> + A<strong>II</strong> yS2 zS2 + Iη ζ,<strong>II</strong>I + A<strong>II</strong>I yS3 zS3 (3)<br />
a · a3 1<br />
Iη,I = =<br />
12 12 cm4<br />
3 a · a3 1<br />
Iη,<strong>II</strong> = =<br />
12 4 cm4<br />
a · (4 a)3<br />
Iη,<strong>II</strong>I = =<br />
12<br />
16<br />
3 cm4<br />
Iη ζ,I = Iη ζ,<strong>II</strong> = Iη ζ,<strong>II</strong>I = 0<br />
Iζ,I = a3 · a<br />
12<br />
Iζ,<strong>II</strong> = (3 a)3 · a<br />
12<br />
Iζ,<strong>II</strong>I = a3 · 4 a<br />
12<br />
= 1<br />
12 cm4<br />
= 9<br />
4 cm4<br />
= 1<br />
3 cm4<br />
zS1 = −(¯zS + 1, 5 a) = −2, 125 cm yS1 = 0, 5 a = 0, 5 cm A1 = a 2 = 1 cm 2<br />
zS2 = −(¯zS + 0, 5 a) = −1, 125 cm yS2 = 0, 5 a = 0, 5 cm A2 = 3 a 2 = 3 cm 2<br />
zS3 = 2 a − ¯zS = 1, 375 cm yS3 = −0, 5 a = −0, 5 cm A3 = 4 a 2 = 4 cm 2<br />
Einsetzen in (1) , (2) und (3) ergibt:<br />
Iy = 21, 54 cm 4 Iz = 4, 67 cm 4 Iyz = −5, 50 cm 4<br />
Mohr’scher Trägheitskreis:<br />
Analog zum Mohrschen Spannungskreis können jetzt mit der Zuordnung<br />
(σy → Iy, σx → Iz, τ → Iyz)<br />
mit Hilfe des Mohr’schen Trägheitskreises die Lage der Hauptachsen (Winkel ϕ) und<br />
die Hauptflächenmomente 2. Grades I ′ y und I′ z (I′ yz<br />
!<br />
= 0) bestimmt werden. Alter-<br />
nativ dazu können die Werte auch durch Auswertung der Formeln (6.47)-(6.49) aus<br />
dem Skript berechnet werden.<br />
(1)<br />
(2)
Der Mohr’sche Trägheitskreis:<br />
I<br />
[cm<br />
yz<br />
4 ]<br />
M b,z’<br />
I<br />
yz .<br />
. 2ϕ .<br />
.<br />
(I z ;−I )<br />
l<br />
z ’<br />
y<br />
y’<br />
ϕ<br />
z<br />
I y ’<br />
(I ;I )<br />
y yz<br />
Iy ,Iz [cm4<br />
]<br />
Abgelesen:<br />
ϕ = 16, 55 o<br />
Iy ′ = 23, 18 cm4<br />
Iz ′ = 3, 03 cm4<br />
Zerlegung der Kraft F auf das y’, z’-Koordinatensystem<br />
M b,y’<br />
Ermittlung der Biegemomente an der Einspannstelle:<br />
Mb,y ′ = Fz ′ ℓ<br />
Mb,z ′ = Fy ′ ℓ<br />
⇒ σb(x, y ′ , z ′ ) =<br />
Fz ′ ℓ<br />
Iy ′<br />
Zahlenwerte einsetzen:<br />
z ′ −<br />
z’<br />
x<br />
F z’<br />
Fy ′ ℓ<br />
Iz ′<br />
σb(x, y ′ , z ′ ) = 614, 51 N<br />
cm3 z′ − 15806 N<br />
y′<br />
cm3 F y’<br />
F<br />
y ′<br />
Fy ′ = F cosϕ = 958, 6 N<br />
Fz ′ = F sin ϕ = 284, 8 N<br />
F z’<br />
F<br />
F y’ ϕ
Bestimmung der maximalen Biegespannung<br />
Gleichung der neutralen Achse:<br />
σb(x, y ′ , z ′ ) = 614, 51 N<br />
cm 3 z′ − 15806 N<br />
cm 3 y′ ! = 0<br />
⇒ 614, 51 z ′ = 15806 y ′<br />
⇒ z ′ = 25, 72 y ′<br />
P1: Punkt mit maximalem Abstand <strong>zur</strong> neutralen Achse<br />
P 1<br />
y<br />
y’<br />
ϕ<br />
z<br />
S<br />
z’<br />
neutrale<br />
Achse<br />
Im Hauptachsensystem:<br />
P1 (1, 75 cm / − 1, 2 cm)<br />
Maximale Druckspannung:<br />
σb,1 = −28397, 6 N N<br />
= −284, 0<br />
cm2 mm2