

Download the TRINAMIC Product Guide
Download the TRINAMIC Product Guide
Download the TRINAMIC Product Guide

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
v_max<br />
v_min<br />
v(t)<br />
velocity<br />
MotIon control profIles<br />
t0<br />
Integrated cIrcuIts<br />
Acceleration and positioning matter. Full stop.<br />
a_max<br />
Δv<br />
Δt01 t1<br />
t2<br />
t3 t4 t5 Δt56<br />
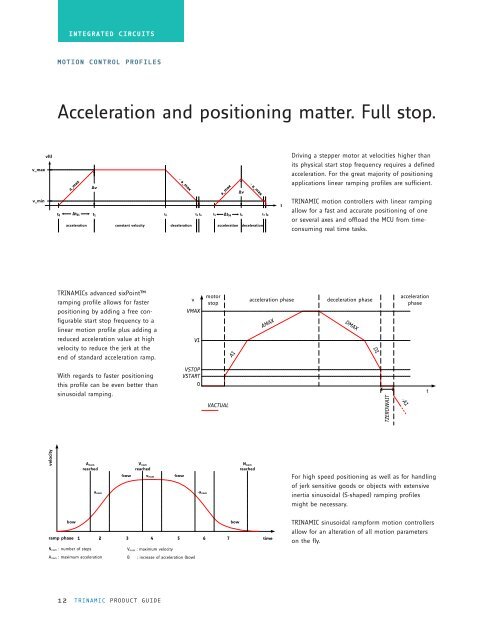
<strong>TRINAMIC</strong>s advanced sixPoint<br />
ramping profile allows for faster<br />
positioning by adding a free configurable<br />
start stop frequency to a<br />
linear motion profile plus adding a<br />
reduced acceleration value at high<br />
velocity to reduce <strong>the</strong> jerk at <strong>the</strong><br />
end of standard acceleration ramp.<br />
With regards to faster positioning<br />
this profile can be even better than<br />
sinusoidal ramping.<br />
- a_max<br />
a_max<br />
Δv<br />
t6<br />
- a_max<br />
acceleration constant velocity deceleration acceleration deceleration<br />
bow<br />
Anom<br />
reached<br />
anom<br />
-bow<br />
Vnom<br />
reached<br />
vnom -bow<br />
ramp phase 1 2 3 4 5 6 7 time<br />
Nnom : number of steps<br />
Anom : maximum acceleration<br />
12 trinamic product <strong>Guide</strong><br />
Vnom : maximum velocity<br />
B : increase of acceleration (bow)<br />
v<br />
VMAX<br />
V1<br />
VSTOP<br />
VSTART<br />
0<br />
-anom<br />
motor<br />
stop<br />
VACTUAL<br />
A1<br />
bow<br />
Nnom<br />
reached<br />
t7 t8<br />
t<br />
Driving a stepper motor at velocities higher than<br />
its physical start stop frequency requires a defined<br />
acceleration. For <strong>the</strong> great majority of positioning<br />
applications linear ramping profiles are sufficient.<br />
<strong>TRINAMIC</strong> motion controllers with linear ramping<br />
allow for a fast and accurate positioning of one<br />
or several axes and offload <strong>the</strong> MCU from timeconsuming<br />
real time tasks.<br />
acceleration phase deceleration phase<br />
AMAX<br />
DMAX<br />
For high speed positioning as well as for handling<br />
of jerk sensitive goods or objects with extensive<br />
inertia sinusoidal (S-shaped) ramping profiles<br />
might be necessary.<br />
<strong>TRINAMIC</strong> sinusoidal rampform motion controllers<br />
allow for an alteration of all motion parameters<br />
on <strong>the</strong> fly.<br />
D1<br />
TZEROWAIT<br />
acceleration<br />
phase<br />
-A1<br />
t














