

Implementation of Cutting Plane Separators for Mixed Integer ... - ZIB
Implementation of Cutting Plane Separators for Mixed Integer ... - ZIB
Implementation of Cutting Plane Separators for Mixed Integer ... - ZIB

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
18<br />
16<br />
14<br />
12<br />
10<br />
8<br />
6<br />
(4.68)<br />
4<br />
(2.1)<br />
2<br />
Gap closed in geometric mean in %<br />
Sepa Time in geometric mean in CPU seconds<br />
(13.48)<br />
(2.7)<br />
(14.51)<br />
(3.0)<br />
(15.41)<br />
(3.5)<br />
0 1 2 3 4 5 6 7 8 9 10<br />
MAXAGGR<br />
3.4 Computational Study 35<br />
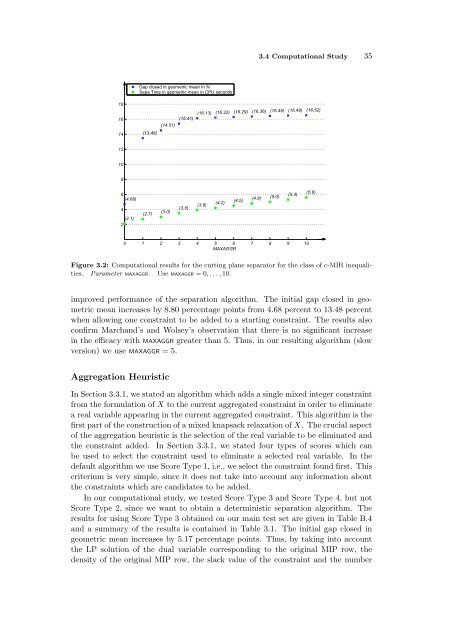
(16.13) (16.22) (16.29) (16.36) (16.45) (16.49) (16.52)<br />
(3.9)<br />
(4.2)<br />
Figure 3.2: Computational results <strong>for</strong> the cutting plane separator <strong>for</strong> the class <strong>of</strong> c-MIR inequalities.<br />
Parameter MAXAGGR. Use MAXAGGR = 0, . . . , 10.<br />
improved per<strong>for</strong>mance <strong>of</strong> the separation algorithm. The initial gap closed in geometric<br />
mean increases by 8.80 percentage points from 4.68 percent to 13.48 percent<br />
when allowing one constraint to be added to a starting constraint. The results also<br />
confirm Marchand’s and Wolsey’s observation that there is no significant increase<br />
in the efficacy with MAXAGGR greater than 5. Thus, in our resulting algorithm (slow<br />
version) we use MAXAGGR = 5.<br />
Aggregation Heuristic<br />
In Section 3.3.1, we stated an algorithm which adds a single mixed integer constraint<br />
from the <strong>for</strong>mulation <strong>of</strong> X to the current aggregated constraint in order to eliminate<br />
a real variable appearing in the current aggregated constraint. This algorithm is the<br />
first part <strong>of</strong> the construction <strong>of</strong> a mixed knapsack relaxation <strong>of</strong> X. The crucial aspect<br />
<strong>of</strong> the aggregation heuristic is the selection <strong>of</strong> the real variable to be eliminated and<br />
the constraint added. In Section 3.3.1, we stated four types <strong>of</strong> scores which can<br />
be used to select the constraint used to eliminate a selected real variable. In the<br />
default algorithm we use Score Type 1, i.e., we select the constraint found first. This<br />
criterium is very simple, since it does not take into account any in<strong>for</strong>mation about<br />
the constraints which are candidates to be added.<br />
In our computational study, we tested Score Type 3 and Score Type 4, but not<br />
Score Type 2, since we want to obtain a deterministic separation algorithm. The<br />
results <strong>for</strong> using Score Type 3 obtained on our main test set are given in Table B.4<br />
and a summary <strong>of</strong> the results is contained in Table 3.1. The initial gap closed in<br />
geometric mean increases by 5.17 percentage points. Thus, by taking into account<br />
the LP solution <strong>of</strong> the dual variable corresponding to the original MIP row, the<br />
density <strong>of</strong> the original MIP row, the slack value <strong>of</strong> the constraint and the number<br />
(4.5)<br />
(4.8)<br />
(5.0)<br />
(5.3)<br />
(5.6)













