MECH 314 Rolling without Slipping 7-Bar Mechanism Velocity ... - CIM
MECH 314 Rolling without Slipping 7-Bar Mechanism Velocity ... - CIM
MECH 314 Rolling without Slipping 7-Bar Mechanism Velocity ... - CIM

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
1 Position Analysis<br />
<strong>MECH</strong> <strong>314</strong><br />
Dynamics of <strong>Mechanism</strong>s<br />
September 27, 2010<br />
<strong>Rolling</strong> <strong>without</strong> <strong>Slipping</strong> 7-<strong>Bar</strong> <strong>Mechanism</strong> <strong>Velocity</strong> Analysis<br />
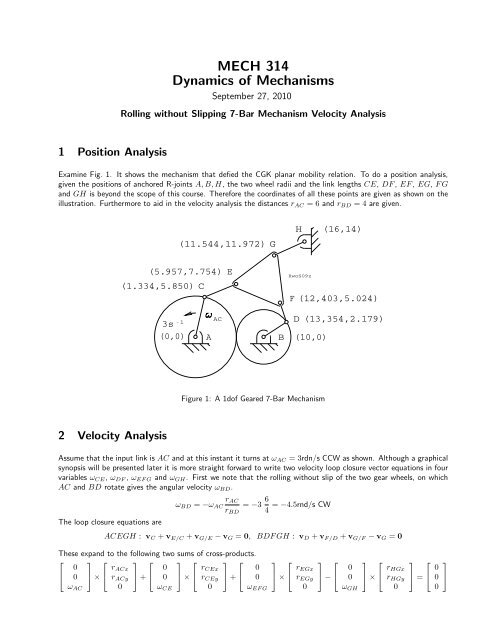
Examine Fig. 1. It shows the mechanism that defied the CGK planar mobility relation. To do a position analysis,<br />
given the positions of anchored R-joints A, B, H, the two wheel radii and the link lengths CE, DF , EF , EG, F G<br />
and GH is beyond the scope of this course. Therefore the coordinates of all these points are given as shown on the<br />
illustration. Furthermore to aid in the velocity analysis the distances rAC = 6 and rBD = 4 are given.<br />
(1.334,5.850) C<br />
2 <strong>Velocity</strong> Analysis<br />
(0,0)<br />
(11.544,11.972) G<br />
(5.957,7.754)<br />
3s -1<br />
A<br />
AC<br />
E<br />
B<br />
H<br />
RwoS09z<br />
F (12,403,5.024)<br />
D<br />
(10,0)<br />
Figure 1: A 1dof Geared 7-<strong>Bar</strong> <strong>Mechanism</strong><br />
(16,14)<br />
(13,354,2.179)<br />
Assume that the input link is AC and at this instant it turns at ωAC = 3rdn/s CCW as shown. Although a graphical<br />
synopsis will be presented later it is more straight forward to write two velocity loop closure vector equations in four<br />
variables ωCE, ωDF , ωEF G and ωGH. First we note that the rolling <strong>without</strong> slip of the two gear wheels, on which<br />
AC and BD rotate gives the angular velocity ωBD.<br />
The loop closure equations are<br />
ωAC<br />
rAC<br />
ωBD = −ωAC<br />
rBD<br />
= −3 6<br />
= −4.5rnd/s CW<br />
4<br />
ACEGH : vC + v E/C + v G/E − vG = 0, BDF GH : vD + v F/D + v G/F − vG = 0<br />
These expand to the following two sums of cross-products.<br />
⎡ ⎤ ⎡ ⎤ ⎡ ⎤ ⎡ ⎤ ⎡<br />
0 rACx 0 rCEx 0<br />
⎣ 0 ⎦ × ⎣ ⎦ + ⎣ 0 ⎦ × ⎣ ⎦ + ⎣ 0<br />
rACy<br />
0<br />
ωCE<br />
rCEy<br />
0<br />
ωEF G<br />
⎤<br />
⎡<br />
⎦ × ⎣<br />
rEGx<br />
rEGy<br />
0<br />
⎤<br />
⎡<br />
⎦ − ⎣<br />
0<br />
0<br />
ωGH<br />
⎤<br />
⎡<br />
⎦ × ⎣<br />
rHGx<br />
rHGy<br />
0<br />
⎤<br />
⎡<br />
⎦ = ⎣<br />
0<br />
0<br />
0<br />
⎤<br />
⎦
2<br />
⎡<br />
⎣<br />
0<br />
0<br />
ωBD<br />
⎤<br />
⎡<br />
⎦ × ⎣<br />
rBDx<br />
rBDy<br />
0<br />
⎤<br />
⎡<br />
⎦ + ⎣<br />
0<br />
0<br />
ωDF<br />
⎤<br />
⎡<br />
⎦ × ⎣<br />
rDF x<br />
rDF y<br />
0<br />
⎤<br />
⎡<br />
⎦ + ⎣<br />
0<br />
0<br />
ωEF G<br />
⎤<br />
⎡<br />
⎦ × ⎣<br />
rF Gx<br />
rF Gy<br />
0<br />
⎤<br />
⎡<br />
⎦ − ⎣<br />
0<br />
0<br />
ωGH<br />
⎤<br />
⎡<br />
⎦ × ⎣<br />
rHGx<br />
rHGy<br />
0<br />
⎤<br />
⎡<br />
⎦ = ⎣<br />
These lead to a detached coefficient form of four simultaneous linear equations in five homogeneous variables<br />
⎡<br />
−ωACrACy<br />
⎢ ωACrACx ⎢<br />
⎣ −ωBDrBDy<br />
ωBDrBDx<br />
−rCEy<br />
rCEx<br />
0<br />
0<br />
0<br />
0<br />
−rDF y<br />
rDF x<br />
−rEGy<br />
rEGx<br />
−rF Gy<br />
rF Gx<br />
rHGy<br />
−rHGx<br />
rHGy<br />
−rHGx<br />
⎡<br />
⎤ ∆<br />
⎢ ΩCE ⎥ ⎢<br />
⎥ ⎢ ΩDF ⎦ ⎢<br />
⎣ ΩEF G<br />
⎤<br />
⎥<br />
⎦ =<br />
⎡ ⎤<br />
0<br />
⎢ 0 ⎥<br />
⎢ 0 ⎥<br />
⎣ 0 ⎦<br />
0<br />
such that<br />
where<br />
ΩGH<br />
ωCE = ΩCE<br />
∆ , ωDF = ΩDF<br />
∆ , ωEF G = ΩEF G<br />
∆ , ωGH = ΩGH<br />
∆<br />
<br />
<br />
<br />
<br />
∆ = <br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
ΩCE = − <br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
ΩDF = <br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
ΩEF G = − <br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
ΩGH = <br />
<br />
<br />
<br />
−rCEy 0 −rEGy rHGy<br />
rCEx 0 rEGx −rHGx<br />
0 −rDF y −rF Gy rHGy<br />
0 rDF x rF Gx −rHGx<br />
−ωACrACy 0 −rEGy rHGy<br />
ωACrACx 0 rEGx −rHGx<br />
−ωBDrBDy −rDF y −rF Gy rHGy<br />
ωBDrBDx rDF x rF Gx −rHGx<br />
−ωACrACy −rCEy −rEGy rHGy<br />
ωACrACx rCEx rEGx −rHGx<br />
−ωBDrBDy 0 −rF Gy rHGy<br />
ωBDrBDx 0 rF Gx −rHGx<br />
−ωACrACy −rCEy 0 rHGy<br />
ωACrACx rCEx 0 −rHGx<br />
−ωBDrBDy 0 −rDF y rHGy<br />
ωBDrBDx 0 rDF x −rHGx<br />
−ωACrACy −rCEy 0 −rEGy<br />
ωACrACx rCEx 0 rEGx<br />
−ωBDrBDy 0 −rDF y −rF Gy<br />
ωBDrBDx 0 rDF x rF Gx<br />
The link vectors are obtained by subtracting the coordinates of the first point subscript from the second, e.g.,<br />
differences of point position vectors such as rAC = c − a.<br />
⎡ ⎤<br />
1.334<br />
⎡<br />
4.623<br />
⎤ ⎡ ⎤<br />
5.587<br />
rAC = ⎣ 5.850 ⎦ , rCE = ⎣ 1.904 ⎦ , rEG = ⎣ 4.218 ⎦<br />
⎡ ⎤<br />
3.354<br />
0<br />
⎡ ⎤<br />
−0.951<br />
0<br />
⎡ ⎤<br />
−0.859<br />
0<br />
⎡<br />
−4.456<br />
⎤<br />
rBD = ⎣ 2.179 ⎦ , rDF = ⎣ 2.845 ⎦ , rF G = ⎣ 6.948 ⎦ , rHG = ⎣ −2.028 ⎦<br />
0<br />
0<br />
0<br />
0<br />
3 Results and a Graphical Check<br />
Substituting the numerical values for the parameters in the detached coefficient matrix yields<br />
⎡<br />
⎢<br />
⎣<br />
−17.55<br />
4.002<br />
9.8055<br />
−1.904<br />
4.623<br />
0<br />
0<br />
0<br />
−2.845<br />
−4.218<br />
5.587<br />
−6.948<br />
⎤<br />
−2.028<br />
4.456 ⎥<br />
−2.028 ⎦<br />
−15.093 0 −0.951 −0.859 4.456<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
0<br />
0<br />
0<br />
⎤<br />
⎦
Taking all 4 × 4 sub-matrix determinants with alternating sign and dividing the last four by the first produces the<br />
unknown angular velocities.<br />
vCy<br />
ωCE = 4.0055, ωDF = 20.846, ωEF G = −8.9105, ωGH = 6.1184<br />
The five point velocity vectors are calculated as follows.<br />
<br />
vCx<br />
<br />
−ωACrACy<br />
=<br />
<br />
−17.55<br />
=<br />
4.002<br />
<br />
,<br />
vEx<br />
vEy<br />
ωACrACx<br />
vDx<br />
vDy<br />
<br />
=<br />
−ωBDrBDy<br />
ωBDrBDx<br />
<br />
vCx − ωCErCEy −25.1765 vGx<br />
=<br />
=<br />
, =<br />
vCy + ωCErCEx 22.5195 vGy<br />
<br />
vF x vDx − ωDF rDF y −49.5023<br />
=<br />
=<br />
−34.9179<br />
vF y<br />
vDy + ωDF rDF x<br />
−ωGHrHGy<br />
ωGHrHGx<br />
<br />
=<br />
9.8095<br />
−15.093<br />
<br />
=<br />
<br />
12.4082<br />
−27.26373<br />
These results are checked by plotting the triangle EF G and projecting the velocity vectors vE, vF and vG onto the<br />
respective triangle sides. Analytically these projections vE=, vF = and vG= would be dot-product operations. All<br />
this has been done in Fig. 2 and the magnitudes of the projected vector pairs at either end of a side are compared.<br />
Notice the good agreement. Discrepancy is largely due to three-place precision of the coordinates of the three points<br />
that were given a-priori.<br />
v EF= @E=31.966<br />
v EF= @F=31.964<br />
v EG= @E=6.528<br />
v EG= @G=6.521<br />
v FG= @F=28.582<br />
v FG= @G=28.580<br />
v F<br />
v EF=<br />
v E<br />
v EG=<br />
E<br />
7BrRB091<br />
Figure 2: Checking the Results of the <strong>Velocity</strong> Analysis<br />
F<br />
G<br />
v FG=<br />
v G<br />
<br />
3