The Social Cognitive Actor A multi-actor simulation of ... - Cogprints
The Social Cognitive Actor A multi-actor simulation of ... - Cogprints
The Social Cognitive Actor A multi-actor simulation of ... - Cogprints

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
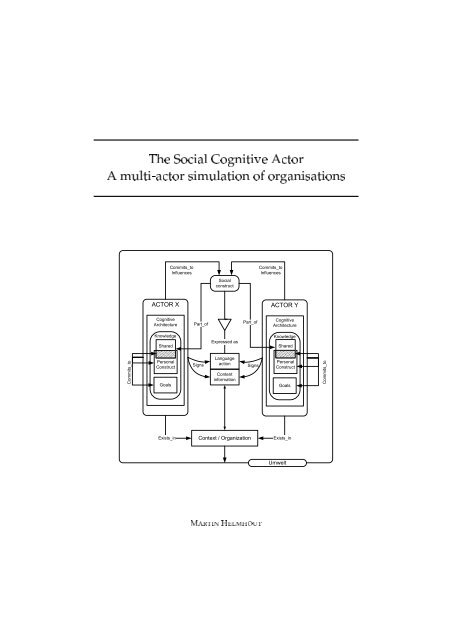
Commits_to<br />
ACTOR X<br />
<strong>Cognitive</strong><br />
Architecture<br />
Knowledge<br />
Shared<br />
Personal<br />
Construct<br />
Goals<br />
Commits_to<br />
Influences<br />
Part_<strong>of</strong><br />
Signs<br />
<strong>Social</strong><br />
construct<br />
Expressed as<br />
Language<br />
action<br />
Content<br />
information<br />
Part_<strong>of</strong><br />
Signs<br />
Commits_to<br />
Influences<br />
ACTOR Y<br />
<strong>Cognitive</strong><br />
Architecture<br />
Knowledge<br />
Goals<br />
Exists_in Context / Organization<br />
Exists_in<br />
<br />
Shared<br />
Personal<br />
Construct<br />
Umwelt<br />
Commits_to
Commits_to<br />
ACTOR X<br />
<strong>Cognitive</strong><br />
Architecture<br />
Knowledge<br />
Shared<br />
Personal<br />
Construct<br />
Goals<br />
Commits_to<br />
Influences<br />
Part_<strong>of</strong><br />
Signs<br />
<strong>Social</strong><br />
construct<br />
Expressed as<br />
Language<br />
action<br />
Content<br />
information<br />
Part_<strong>of</strong><br />
Signs<br />
Commits_to<br />
Influences<br />
ACTOR Y<br />
<strong>Cognitive</strong><br />
Architecture<br />
Knowledge<br />
Goals<br />
Exists_in Context / Organization<br />
Exists_in<br />
<br />
Shared<br />
Personal<br />
Construct<br />
Umwelt<br />
Commits_to
Commits_to<br />
ACTOR X<br />
<strong>Cognitive</strong><br />
Architecture<br />
Knowledge<br />
Shared<br />
Personal<br />
Construct<br />
Goals<br />
Commits_to<br />
Influences<br />
Part_<strong>of</strong><br />
Signs<br />
<strong>Social</strong><br />
construct<br />
Expressed as<br />
Language<br />
action<br />
Content<br />
information<br />
Part_<strong>of</strong><br />
Signs<br />
Commits_to<br />
Influences<br />
ACTOR Y<br />
<strong>Cognitive</strong><br />
Architecture<br />
Knowledge<br />
Goals<br />
Exists_in Context / Organization<br />
Exists_in<br />
<br />
Shared<br />
Personal<br />
Construct<br />
Umwelt<br />
Commits_to
Commits_to<br />
ACTOR X<br />
<strong>Cognitive</strong><br />
Architecture<br />
Knowledge<br />
Shared<br />
Personal<br />
Construct<br />
Goals<br />
Commits_to<br />
Influences<br />
Part_<strong>of</strong><br />
Signs<br />
<strong>Social</strong><br />
construct<br />
Expressed as<br />
Language<br />
action<br />
Content<br />
information<br />
Part_<strong>of</strong><br />
Signs<br />
Commits_to<br />
Influences<br />
ACTOR Y<br />
<strong>Cognitive</strong><br />
Architecture<br />
Knowledge<br />
Goals<br />
Exists_in Context / Organization<br />
Exists_in<br />
<br />
Shared<br />
Personal<br />
Construct<br />
Umwelt<br />
Commits_to
Preface
Preface
Preface
Preface
Contents
Contents
Contents
Contents
List <strong>of</strong> Figures
List <strong>of</strong> Figures
List <strong>of</strong> Figures
List <strong>of</strong> Tables
CHAPTER 1<br />
Introduction
CHAPTER 1<br />
Introduction
CHAPTER 1<br />
Introduction
CHAPTER 1<br />
Introduction
CHAPTER 1<br />
Introduction
CHAPTER 1<br />
Introduction
Model Simulation Simulated data<br />
Abstraction<br />
Similarity<br />
Target Data gathering Collected data
Model Simulation Simulated data<br />
Abstraction<br />
Similarity<br />
Target Data gathering Collected data
Model Simulation Simulated data<br />
Abstraction<br />
Similarity<br />
Target Data gathering Collected data
Redefinition<br />
Solutions/<br />
Understanding<br />
Experimentation<br />
Solution Verification<br />
Experimentation Validation<br />
Real World<br />
Data Verification<br />
Experimental<br />
Model<br />
Conceptual model Verification<br />
and Validation<br />
Experiment<br />
Validation<br />
Conceptual Modelling<br />
Program<br />
Validation<br />
Conceptual<br />
Model<br />
Computer<br />
Model<br />
Design <strong>of</strong> Experiments<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
Model Coding
Redefinition<br />
Solutions/<br />
Understanding<br />
Experimentation<br />
Solution Verification<br />
Experimentation Validation<br />
Real World<br />
Data Verification<br />
Experimental<br />
Model<br />
Conceptual model Verification<br />
and Validation<br />
Experiment<br />
Validation<br />
Conceptual Modelling<br />
Program<br />
Validation<br />
Conceptual<br />
Model<br />
Computer<br />
Model<br />
Design <strong>of</strong> Experiments<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
Model Coding
Redefinition<br />
Solutions/<br />
Understanding<br />
Experimentation<br />
Solution Verification<br />
Experimentation Validation<br />
Real World<br />
Data Verification<br />
Experimental<br />
Model<br />
Conceptual model Verification<br />
and Validation<br />
Experiment<br />
Validation<br />
Conceptual Modelling<br />
Program<br />
Validation<br />
Conceptual<br />
Model<br />
Computer<br />
Model<br />
Design <strong>of</strong> Experiments<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
Model Coding
Redefinition<br />
Solutions/<br />
Understanding<br />
Experimentation<br />
Solution Verification<br />
Experimentation Validation<br />
Real World<br />
Data Verification<br />
Experimental<br />
Model<br />
Conceptual model Verification<br />
and Validation<br />
Experiment<br />
Validation<br />
Conceptual Modelling<br />
Program<br />
Validation<br />
Conceptual<br />
Model<br />
Computer<br />
Model<br />
Design <strong>of</strong> Experiments<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
Model Coding
Redefinition<br />
Solutions/<br />
Understanding<br />
Experimentation<br />
Solution Verification<br />
Experimentation Validation<br />
Real World<br />
Data Verification<br />
Experimental<br />
Model<br />
Conceptual model Verification<br />
and Validation<br />
Experiment<br />
Validation<br />
Conceptual Modelling<br />
Program<br />
Validation<br />
Conceptual<br />
Model<br />
Computer<br />
Model<br />
Design <strong>of</strong> Experiments<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
Model Coding
Model <strong>of</strong> <strong>actor</strong><br />
Task Environment<br />
(<strong>Actor</strong> objects)<br />
(Environment objects)<br />
C2<br />
Multi-Agent <strong>The</strong>ory<br />
C1<br />
Introduction &<br />
Research questions<br />
<strong>Social</strong> constructivism<br />
&<br />
Organizational<br />
Semiotics<br />
Generic individual model<br />
RBot<br />
Generic <strong>multi</strong>-<strong>actor</strong> model<br />
Multi-RBot System (MRS)<br />
Specific <strong>multi</strong>-<strong>actor</strong><br />
model<br />
C6<br />
Demonstrative<br />
experiments<br />
Conclusion &<br />
Discussion<br />
C3 C4<br />
C5<br />
C5<br />
C6 C6<br />
C7<br />
ACT-R
Model <strong>of</strong> <strong>actor</strong><br />
Task Environment<br />
(<strong>Actor</strong> objects)<br />
(Environment objects)<br />
C2<br />
Multi-Agent <strong>The</strong>ory<br />
C1<br />
Introduction &<br />
Research questions<br />
<strong>Social</strong> constructivism<br />
&<br />
Organizational<br />
Semiotics<br />
Generic individual model<br />
RBot<br />
Generic <strong>multi</strong>-<strong>actor</strong> model<br />
Multi-RBot System (MRS)<br />
Specific <strong>multi</strong>-<strong>actor</strong><br />
model<br />
C6<br />
Demonstrative<br />
experiments<br />
Conclusion &<br />
Discussion<br />
C3 C4<br />
C5<br />
C5<br />
C6 C6<br />
C7<br />
ACT-R
CHAPTER 2<br />
Multi-Agent Systems<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
1700<br />
1900<br />
1940<br />
1950<br />
1960<br />
1970<br />
1980<br />
1990<br />
2000<br />
Differential equations<br />
Micro<strong>simulation</strong> Queueing models<br />
System dynamics Discrete Event<br />
Simulation<br />
World dynamics<br />
Stochastic Processes<br />
Workflow BPR<br />
Informatics<br />
Game theory<br />
Cellular Automata<br />
CA models<br />
Artificial<br />
Intelligence (AI)<br />
Distributed AI<br />
Distributed Problem<br />
Solving (DPS)<br />
(<strong>Cognitive</strong>) psychology<br />
<strong>Social</strong> science<br />
Economics<br />
Multi-Agent<br />
Systems (MAS)
CHAPTER 2<br />
Multi-Agent Systems<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
1700<br />
1900<br />
1940<br />
1950<br />
1960<br />
1970<br />
1980<br />
1990<br />
2000<br />
Differential equations<br />
Micro<strong>simulation</strong> Queueing models<br />
System dynamics Discrete Event<br />
Simulation<br />
World dynamics<br />
Stochastic Processes<br />
Workflow BPR<br />
Informatics<br />
Game theory<br />
Cellular Automata<br />
CA models<br />
Artificial<br />
Intelligence (AI)<br />
Distributed AI<br />
Distributed Problem<br />
Solving (DPS)<br />
(<strong>Cognitive</strong>) psychology<br />
<strong>Social</strong> science<br />
Economics<br />
Multi-Agent<br />
Systems (MAS)
CHAPTER 2<br />
Multi-Agent Systems<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
1700<br />
1900<br />
1940<br />
1950<br />
1960<br />
1970<br />
1980<br />
1990<br />
2000<br />
Differential equations<br />
Micro<strong>simulation</strong> Queueing models<br />
System dynamics Discrete Event<br />
Simulation<br />
World dynamics<br />
Stochastic Processes<br />
Workflow BPR<br />
Informatics<br />
Game theory<br />
Cellular Automata<br />
CA models<br />
Artificial<br />
Intelligence (AI)<br />
Distributed AI<br />
Distributed Problem<br />
Solving (DPS)<br />
(<strong>Cognitive</strong>) psychology<br />
<strong>Social</strong> science<br />
Economics<br />
Multi-Agent<br />
Systems (MAS)
CHAPTER 2<br />
Multi-Agent Systems<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
1700<br />
1900<br />
1940<br />
1950<br />
1960<br />
1970<br />
1980<br />
1990<br />
2000<br />
Differential equations<br />
Micro<strong>simulation</strong> Queueing models<br />
System dynamics Discrete Event<br />
Simulation<br />
World dynamics<br />
Stochastic Processes<br />
Workflow BPR<br />
Informatics<br />
Game theory<br />
Cellular Automata<br />
CA models<br />
Artificial<br />
Intelligence (AI)<br />
Distributed AI<br />
Distributed Problem<br />
Solving (DPS)<br />
(<strong>Cognitive</strong>) psychology<br />
<strong>Social</strong> science<br />
Economics<br />
Multi-Agent<br />
Systems (MAS)
CHAPTER 2<br />
Multi-Agent Systems<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
1700<br />
1900<br />
1940<br />
1950<br />
1960<br />
1970<br />
1980<br />
1990<br />
2000<br />
Differential equations<br />
Micro<strong>simulation</strong> Queueing models<br />
System dynamics Discrete Event<br />
Simulation<br />
World dynamics<br />
Stochastic Processes<br />
Workflow BPR<br />
Informatics<br />
Game theory<br />
Cellular Automata<br />
CA models<br />
Artificial<br />
Intelligence (AI)<br />
Distributed AI<br />
Distributed Problem<br />
Solving (DPS)<br />
(<strong>Cognitive</strong>) psychology<br />
<strong>Social</strong> science<br />
Economics<br />
Multi-Agent<br />
Systems (MAS)
CHAPTER 2<br />
Multi-Agent Systems<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
1700<br />
1900<br />
1940<br />
1950<br />
1960<br />
1970<br />
1980<br />
1990<br />
2000<br />
Differential equations<br />
Micro<strong>simulation</strong> Queueing models<br />
System dynamics Discrete Event<br />
Simulation<br />
World dynamics<br />
Stochastic Processes<br />
Workflow BPR<br />
Informatics<br />
Game theory<br />
Cellular Automata<br />
CA models<br />
Artificial<br />
Intelligence (AI)<br />
Distributed AI<br />
Distributed Problem<br />
Solving (DPS)<br />
(<strong>Cognitive</strong>) psychology<br />
<strong>Social</strong> science<br />
Economics<br />
Multi-Agent<br />
Systems (MAS)
CHAPTER 2<br />
Multi-Agent Systems<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
1700<br />
1900<br />
1940<br />
1950<br />
1960<br />
1970<br />
1980<br />
1990<br />
2000<br />
Differential equations<br />
Micro<strong>simulation</strong> Queueing models<br />
System dynamics Discrete Event<br />
Simulation<br />
World dynamics<br />
Stochastic Processes<br />
Workflow BPR<br />
Informatics<br />
Game theory<br />
Cellular Automata<br />
CA models<br />
Artificial<br />
Intelligence (AI)<br />
Distributed AI<br />
Distributed Problem<br />
Solving (DPS)<br />
(<strong>Cognitive</strong>) psychology<br />
<strong>Social</strong> science<br />
Economics<br />
Multi-Agent<br />
Systems (MAS)
CHAPTER 2<br />
Multi-Agent Systems<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
1700<br />
1900<br />
1940<br />
1950<br />
1960<br />
1970<br />
1980<br />
1990<br />
2000<br />
Differential equations<br />
Micro<strong>simulation</strong> Queueing models<br />
System dynamics Discrete Event<br />
Simulation<br />
World dynamics<br />
Stochastic Processes<br />
Workflow BPR<br />
Informatics<br />
Game theory<br />
Cellular Automata<br />
CA models<br />
Artificial<br />
Intelligence (AI)<br />
Distributed AI<br />
Distributed Problem<br />
Solving (DPS)<br />
(<strong>Cognitive</strong>) psychology<br />
<strong>Social</strong> science<br />
Economics<br />
Multi-Agent<br />
Systems (MAS)
CHAPTER 2<br />
Multi-Agent Systems<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
1700<br />
1900<br />
1940<br />
1950<br />
1960<br />
1970<br />
1980<br />
1990<br />
2000<br />
Differential equations<br />
Micro<strong>simulation</strong> Queueing models<br />
System dynamics Discrete Event<br />
Simulation<br />
World dynamics<br />
Stochastic Processes<br />
Workflow BPR<br />
Informatics<br />
Game theory<br />
Cellular Automata<br />
CA models<br />
Artificial<br />
Intelligence (AI)<br />
Distributed AI<br />
Distributed Problem<br />
Solving (DPS)<br />
(<strong>Cognitive</strong>) psychology<br />
<strong>Social</strong> science<br />
Economics<br />
Multi-Agent<br />
Systems (MAS)
CHAPTER 2<br />
Multi-Agent Systems<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
1700<br />
1900<br />
1940<br />
1950<br />
1960<br />
1970<br />
1980<br />
1990<br />
2000<br />
Differential equations<br />
Micro<strong>simulation</strong> Queueing models<br />
System dynamics Discrete Event<br />
Simulation<br />
World dynamics<br />
Stochastic Processes<br />
Workflow BPR<br />
Informatics<br />
Game theory<br />
Cellular Automata<br />
CA models<br />
Artificial<br />
Intelligence (AI)<br />
Distributed AI<br />
Distributed Problem<br />
Solving (DPS)<br />
(<strong>Cognitive</strong>) psychology<br />
<strong>Social</strong> science<br />
Economics<br />
Multi-Agent<br />
Systems (MAS)
CHAPTER 2<br />
Multi-Agent Systems<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
1700<br />
1900<br />
1940<br />
1950<br />
1960<br />
1970<br />
1980<br />
1990<br />
2000<br />
Differential equations<br />
Micro<strong>simulation</strong> Queueing models<br />
System dynamics Discrete Event<br />
Simulation<br />
World dynamics<br />
Stochastic Processes<br />
Workflow BPR<br />
Informatics<br />
Game theory<br />
Cellular Automata<br />
CA models<br />
Artificial<br />
Intelligence (AI)<br />
Distributed AI<br />
Distributed Problem<br />
Solving (DPS)<br />
(<strong>Cognitive</strong>) psychology<br />
<strong>Social</strong> science<br />
Economics<br />
Multi-Agent<br />
Systems (MAS)
Memory<br />
Procedural Memory (PM) Declarative Memory(DM)<br />
Long Term Memory (LTM) Short Term Memory (STM)<br />
Episodic Memory (EM) Semantic Memory (SEM)<br />
Working Memory (WM)<br />
<br />
<br />
Sensory Memory (SM)
→ <br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
→
→ <br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
→
→ <br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
→
→ <br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
→
COMPLETE AGENT<br />
Learning<br />
mechanisms<br />
Sensors<br />
Attention<br />
Perception<br />
Language<br />
understanding<br />
Reflective agency<br />
Deliberative mechanisms<br />
Internal models<br />
Planning<br />
Problem solving<br />
Scheduling<br />
Language composition<br />
Drives<br />
Workspace<br />
Deliberative agency<br />
Reactive agency<br />
Reflexive agency<br />
<br />
Memory<br />
Action<br />
selection<br />
Environment<br />
Actions
COMPLETE AGENT<br />
Learning<br />
mechanisms<br />
Sensors<br />
Attention<br />
Perception<br />
Language<br />
understanding<br />
Reflective agency<br />
Deliberative mechanisms<br />
Internal models<br />
Planning<br />
Problem solving<br />
Scheduling<br />
Language composition<br />
Drives<br />
Workspace<br />
Deliberative agency<br />
Reactive agency<br />
Reflexive agency<br />
<br />
Memory<br />
Action<br />
selection<br />
Environment<br />
Actions
COMPLETE AGENT<br />
Learning<br />
mechanisms<br />
Sensors<br />
Attention<br />
Perception<br />
Language<br />
understanding<br />
Reflective agency<br />
Deliberative mechanisms<br />
Internal models<br />
Planning<br />
Problem solving<br />
Scheduling<br />
Language composition<br />
Drives<br />
Workspace<br />
Deliberative agency<br />
Reactive agency<br />
Reflexive agency<br />
<br />
Memory<br />
Action<br />
selection<br />
Environment<br />
Actions
COMPLETE AGENT<br />
Learning<br />
mechanisms<br />
Sensors<br />
Attention<br />
Perception<br />
Language<br />
understanding<br />
Reflective agency<br />
Deliberative mechanisms<br />
Internal models<br />
Planning<br />
Problem solving<br />
Scheduling<br />
Language composition<br />
Drives<br />
Workspace<br />
Deliberative agency<br />
Reactive agency<br />
Reflexive agency<br />
<br />
Memory<br />
Action<br />
selection<br />
Environment<br />
Actions
COMPLETE AGENT<br />
Learning<br />
mechanisms<br />
Sensors<br />
Attention<br />
Perception<br />
Language<br />
understanding<br />
Reflective agency<br />
Deliberative mechanisms<br />
Internal models<br />
Planning<br />
Problem solving<br />
Scheduling<br />
Language composition<br />
Drives<br />
Workspace<br />
Deliberative agency<br />
Reactive agency<br />
Reflexive agency<br />
<br />
Memory<br />
Action<br />
selection<br />
Environment<br />
Actions
COMPLETE AGENT<br />
Learning<br />
mechanisms<br />
Sensors<br />
Attention<br />
Perception<br />
Language<br />
understanding<br />
Reflective agency<br />
Deliberative mechanisms<br />
Internal models<br />
Planning<br />
Problem solving<br />
Scheduling<br />
Language composition<br />
Drives<br />
Workspace<br />
Deliberative agency<br />
Reactive agency<br />
Reflexive agency<br />
<br />
Memory<br />
Action<br />
selection<br />
Environment<br />
Actions
COMPLETE AGENT<br />
Learning<br />
mechanisms<br />
Sensors<br />
Attention<br />
Perception<br />
Language<br />
understanding<br />
Reflective agency<br />
Deliberative mechanisms<br />
Internal models<br />
Planning<br />
Problem solving<br />
Scheduling<br />
Language composition<br />
Drives<br />
Workspace<br />
Deliberative agency<br />
Reactive agency<br />
Reflexive agency<br />
<br />
Memory<br />
Action<br />
selection<br />
Environment<br />
Actions
COMPLETE AGENT<br />
Learning<br />
mechanisms<br />
Sensors<br />
Attention<br />
Perception<br />
Language<br />
understanding<br />
Reflective agency<br />
Deliberative mechanisms<br />
Internal models<br />
Planning<br />
Problem solving<br />
Scheduling<br />
Language composition<br />
Drives<br />
Workspace<br />
Deliberative agency<br />
Reactive agency<br />
Reflexive agency<br />
<br />
Memory<br />
Action<br />
selection<br />
Environment<br />
Actions
COMPLETE AGENT<br />
Learning<br />
mechanisms<br />
Sensors<br />
Attention<br />
Perception<br />
Language<br />
understanding<br />
Reflective agency<br />
Deliberative mechanisms<br />
Internal models<br />
Planning<br />
Problem solving<br />
Scheduling<br />
Language composition<br />
Drives<br />
Workspace<br />
Deliberative agency<br />
Reactive agency<br />
Reflexive agency<br />
<br />
Memory<br />
Action<br />
selection<br />
Environment<br />
Actions
COMPLETE AGENT<br />
Learning<br />
mechanisms<br />
Sensors<br />
Attention<br />
Perception<br />
Language<br />
understanding<br />
Reflective agency<br />
Deliberative mechanisms<br />
Internal models<br />
Planning<br />
Problem solving<br />
Scheduling<br />
Language composition<br />
Drives<br />
Workspace<br />
Deliberative agency<br />
Reactive agency<br />
Reflexive agency<br />
<br />
Memory<br />
Action<br />
selection<br />
Environment<br />
Actions
Physical environment<br />
Communication environment<br />
<strong>Social</strong> environment<br />
Cognition (agent)
Physical environment<br />
Communication environment<br />
<strong>Social</strong> environment<br />
Cognition (agent)
Incompatibility<br />
Negative<br />
relationships<br />
(conflicts)<br />
Consumable<br />
resources<br />
Conflicts on<br />
resources<br />
Relationships<br />
between<br />
agents<br />
Non-consumable<br />
resources<br />
Positive<br />
relationships<br />
(cooperation)<br />
Request<br />
(explicit)<br />
Non-requested<br />
(implicit)<br />
<strong>The</strong> action equality<br />
relationship<br />
<strong>The</strong> consequence<br />
relationship<br />
<strong>The</strong> favour<br />
relationship
Incompatibility<br />
Negative<br />
relationships<br />
(conflicts)<br />
Consumable<br />
resources<br />
Conflicts on<br />
resources<br />
Relationships<br />
between<br />
agents<br />
Non-consumable<br />
resources<br />
Positive<br />
relationships<br />
(cooperation)<br />
Request<br />
(explicit)<br />
Non-requested<br />
(implicit)<br />
<strong>The</strong> action equality<br />
relationship<br />
<strong>The</strong> consequence<br />
relationship<br />
<strong>The</strong> favour<br />
relationship
Incompatibility<br />
Negative<br />
relationships<br />
(conflicts)<br />
Consumable<br />
resources<br />
Conflicts on<br />
resources<br />
Relationships<br />
between<br />
agents<br />
Non-consumable<br />
resources<br />
Positive<br />
relationships<br />
(cooperation)<br />
Request<br />
(explicit)<br />
Non-requested<br />
(implicit)<br />
<strong>The</strong> action equality<br />
relationship<br />
<strong>The</strong> consequence<br />
relationship<br />
<strong>The</strong> favour<br />
relationship
Incompatibility<br />
Negative<br />
relationships<br />
(conflicts)<br />
Consumable<br />
resources<br />
Conflicts on<br />
resources<br />
Relationships<br />
between<br />
agents<br />
Non-consumable<br />
resources<br />
Positive<br />
relationships<br />
(cooperation)<br />
Request<br />
(explicit)<br />
Non-requested<br />
(implicit)<br />
<strong>The</strong> action equality<br />
relationship<br />
<strong>The</strong> consequence<br />
relationship<br />
<strong>The</strong> favour<br />
relationship
Incompatibility<br />
Negative<br />
relationships<br />
(conflicts)<br />
Consumable<br />
resources<br />
Conflicts on<br />
resources<br />
Relationships<br />
between<br />
agents<br />
Non-consumable<br />
resources<br />
Positive<br />
relationships<br />
(cooperation)<br />
Request<br />
(explicit)<br />
Non-requested<br />
(implicit)<br />
<strong>The</strong> action equality<br />
relationship<br />
<strong>The</strong> consequence<br />
relationship<br />
<strong>The</strong> favour<br />
relationship
Incompatibility<br />
Negative<br />
relationships<br />
(conflicts)<br />
Consumable<br />
resources<br />
Conflicts on<br />
resources<br />
Relationships<br />
between<br />
agents<br />
Non-consumable<br />
resources<br />
Positive<br />
relationships<br />
(cooperation)<br />
Request<br />
(explicit)<br />
Non-requested<br />
(implicit)<br />
<strong>The</strong> action equality<br />
relationship<br />
<strong>The</strong> consequence<br />
relationship<br />
<strong>The</strong> favour<br />
relationship
1 2 3
1 2 3
1 2 3
Recipe<br />
attainable<br />
Initial<br />
assumptions<br />
OK<br />
Expected<br />
results<br />
produced<br />
Recipe<br />
valid<br />
Individual Recipe<br />
commitment = OK<br />
Relationships<br />
esablished<br />
Others<br />
commited to<br />
recipe<br />
No new<br />
Intentions<br />
adopted<br />
Join goal Joint Action = OK<br />
Recipe not<br />
violated<br />
Task input<br />
available<br />
Task completed<br />
in time<br />
Goal can be<br />
attained<br />
Relationships<br />
upheld<br />
Normal Achievement<br />
goal = OK<br />
Goal motive<br />
OK<br />
Beliefs for<br />
wanting goal<br />
OK<br />
Goal<br />
unsatisfied<br />
No conflicts<br />
with other<br />
goals
Inter-Agent<br />
Communication<br />
Cooperation &<br />
Control Layer<br />
Control<br />
Data<br />
Domain Level System<br />
Cooperation<br />
module<br />
Situation<br />
assesment<br />
module<br />
Communication Manager<br />
CONTROLE MODULE<br />
<br />
Acquaintance<br />
model<br />
Self model<br />
Information<br />
store<br />
Task 1 Task 2<br />
Task n
Inter-Agent<br />
Communication<br />
Cooperation &<br />
Control Layer<br />
Control<br />
Data<br />
Domain Level System<br />
Cooperation<br />
module<br />
Situation<br />
assesment<br />
module<br />
Communication Manager<br />
CONTROLE MODULE<br />
<br />
Acquaintance<br />
model<br />
Self model<br />
Information<br />
store<br />
Task 1 Task 2<br />
Task n
Inter-Agent<br />
Communication<br />
Cooperation &<br />
Control Layer<br />
Control<br />
Data<br />
Domain Level System<br />
Cooperation<br />
module<br />
Situation<br />
assesment<br />
module<br />
Communication Manager<br />
CONTROLE MODULE<br />
<br />
Acquaintance<br />
model<br />
Self model<br />
Information<br />
store<br />
Task 1 Task 2<br />
Task n
Inter-Agent<br />
Communication<br />
Cooperation &<br />
Control Layer<br />
Control<br />
Data<br />
Domain Level System<br />
Cooperation<br />
module<br />
Situation<br />
assesment<br />
module<br />
Communication Manager<br />
CONTROLE MODULE<br />
<br />
Acquaintance<br />
model<br />
Self model<br />
Information<br />
store<br />
Task 1 Task 2<br />
Task n
Inter-Agent<br />
Communication<br />
Cooperation &<br />
Control Layer<br />
Control<br />
Data<br />
Domain Level System<br />
Cooperation<br />
module<br />
Situation<br />
assesment<br />
module<br />
Communication Manager<br />
CONTROLE MODULE<br />
<br />
Acquaintance<br />
model<br />
Self model<br />
Information<br />
store<br />
Task 1 Task 2<br />
Task n
Inter-Agent<br />
Communication<br />
Cooperation &<br />
Control Layer<br />
Control<br />
Data<br />
Domain Level System<br />
Cooperation<br />
module<br />
Situation<br />
assesment<br />
module<br />
Communication Manager<br />
CONTROLE MODULE<br />
<br />
Acquaintance<br />
model<br />
Self model<br />
Information<br />
store<br />
Task 1 Task 2<br />
Task n
Inter-Agent<br />
Communication<br />
Cooperation &<br />
Control Layer<br />
Control<br />
Data<br />
Domain Level System<br />
Cooperation<br />
module<br />
Situation<br />
assesment<br />
module<br />
Communication Manager<br />
CONTROLE MODULE<br />
<br />
Acquaintance<br />
model<br />
Self model<br />
Information<br />
store<br />
Task 1 Task 2<br />
Task n
CHAPTER 3<br />
<strong>The</strong> <strong>Social</strong> <strong>Actor</strong>
CHAPTER 3<br />
<strong>The</strong> <strong>Social</strong> <strong>Actor</strong>
Section 3.4<br />
<strong>Social</strong> Constructs<br />
ACTOR<br />
(intentional + functional level )<br />
<strong>Cognitive</strong> (and social)<br />
Psychology<br />
Chapter 4<br />
COMMUNITY<br />
(<strong>Social</strong> level)<br />
<strong>Actor</strong><br />
Section 3.3<br />
<strong>Actor</strong> Interaction<br />
(Semiotic level)<br />
<br />
(Organizational) Semiotics<br />
<strong>Actor</strong><br />
<strong>Social</strong> Constructivism<br />
Section 3.1 + 3.2
Section 3.4<br />
<strong>Social</strong> Constructs<br />
ACTOR<br />
(intentional + functional level )<br />
<strong>Cognitive</strong> (and social)<br />
Psychology<br />
Chapter 4<br />
COMMUNITY<br />
(<strong>Social</strong> level)<br />
<strong>Actor</strong><br />
Section 3.3<br />
<strong>Actor</strong> Interaction<br />
(Semiotic level)<br />
<br />
(Organizational) Semiotics<br />
<strong>Actor</strong><br />
<strong>Social</strong> Constructivism<br />
Section 3.1 + 3.2
Section 3.4<br />
<strong>Social</strong> Constructs<br />
ACTOR<br />
(intentional + functional level )<br />
<strong>Cognitive</strong> (and social)<br />
Psychology<br />
Chapter 4<br />
COMMUNITY<br />
(<strong>Social</strong> level)<br />
<strong>Actor</strong><br />
Section 3.3<br />
<strong>Actor</strong> Interaction<br />
(Semiotic level)<br />
<br />
(Organizational) Semiotics<br />
<strong>Actor</strong><br />
<strong>Social</strong> Constructivism<br />
Section 3.1 + 3.2
Section 3.4<br />
<strong>Social</strong> Constructs<br />
ACTOR<br />
(intentional + functional level )<br />
<strong>Cognitive</strong> (and social)<br />
Psychology<br />
Chapter 4<br />
COMMUNITY<br />
(<strong>Social</strong> level)<br />
<strong>Actor</strong><br />
Section 3.3<br />
<strong>Actor</strong> Interaction<br />
(Semiotic level)<br />
<br />
(Organizational) Semiotics<br />
<strong>Actor</strong><br />
<strong>Social</strong> Constructivism<br />
Section 3.1 + 3.2
Section 3.4<br />
<strong>Social</strong> Constructs<br />
ACTOR<br />
(intentional + functional level )<br />
<strong>Cognitive</strong> (and social)<br />
Psychology<br />
Chapter 4<br />
COMMUNITY<br />
(<strong>Social</strong> level)<br />
<strong>Actor</strong><br />
Section 3.3<br />
<strong>Actor</strong> Interaction<br />
(Semiotic level)<br />
<br />
(Organizational) Semiotics<br />
<strong>Actor</strong><br />
<strong>Social</strong> Constructivism<br />
Section 3.1 + 3.2
Section 3.4<br />
<strong>Social</strong> Constructs<br />
ACTOR<br />
(intentional + functional level )<br />
<strong>Cognitive</strong> (and social)<br />
Psychology<br />
Chapter 4<br />
COMMUNITY<br />
(<strong>Social</strong> level)<br />
<strong>Actor</strong><br />
Section 3.3<br />
<strong>Actor</strong> Interaction<br />
(Semiotic level)<br />
<br />
(Organizational) Semiotics<br />
<strong>Actor</strong><br />
<strong>Social</strong> Constructivism<br />
Section 3.1 + 3.2
Section 3.4<br />
<strong>Social</strong> Constructs<br />
ACTOR<br />
(intentional + functional level )<br />
<strong>Cognitive</strong> (and social)<br />
Psychology<br />
Chapter 4<br />
COMMUNITY<br />
(<strong>Social</strong> level)<br />
<strong>Actor</strong><br />
Section 3.3<br />
<strong>Actor</strong> Interaction<br />
(Semiotic level)<br />
<br />
(Organizational) Semiotics<br />
<strong>Actor</strong><br />
<strong>Social</strong> Constructivism<br />
Section 3.1 + 3.2
Section 3.4<br />
<strong>Social</strong> Constructs<br />
ACTOR<br />
(intentional + functional level )<br />
<strong>Cognitive</strong> (and social)<br />
Psychology<br />
Chapter 4<br />
COMMUNITY<br />
(<strong>Social</strong> level)<br />
<strong>Actor</strong><br />
Section 3.3<br />
<strong>Actor</strong> Interaction<br />
(Semiotic level)<br />
<br />
(Organizational) Semiotics<br />
<strong>Actor</strong><br />
<strong>Social</strong> Constructivism<br />
Section 3.1 + 3.2
Merk-<br />
Organ<br />
Wirk-<br />
Organ<br />
Innenwelt des<br />
Subjekts<br />
Merkwelt<br />
Wirkwelt<br />
Objekt<br />
<br />
Receptor<br />
Merkmal-Träger<br />
Gegengefüge<br />
Wirkmal-Träger<br />
Effektor
Merk-<br />
Organ<br />
Wirk-<br />
Organ<br />
Innenwelt des<br />
Subjekts<br />
Merkwelt<br />
Wirkwelt<br />
Objekt<br />
<br />
Receptor<br />
Merkmal-Träger<br />
Gegengefüge<br />
Wirkmal-Träger<br />
Effektor
Merk-<br />
Organ<br />
Wirk-<br />
Organ<br />
Innenwelt des<br />
Subjekts<br />
Merkwelt<br />
Wirkwelt<br />
Objekt<br />
<br />
Receptor<br />
Merkmal-Träger<br />
Gegengefüge<br />
Wirkmal-Träger<br />
Effektor
Merk-<br />
Organ<br />
Wirk-<br />
Organ<br />
Innenwelt des<br />
Subjekts<br />
Merkwelt<br />
Wirkwelt<br />
Objekt<br />
<br />
Receptor<br />
Merkmal-Träger<br />
Gegengefüge<br />
Wirkmal-Träger<br />
Effektor
Situation<br />
Context<br />
SOURCE<br />
Formulates<br />
Encodes<br />
Trans-situational<br />
grounds<br />
Situation<br />
Responsive<br />
MESSAGE<br />
<br />
DESTINATION<br />
Interprets<br />
Decodes<br />
CODE Expressive Mediational Directed CODE<br />
Medium / Channel<br />
Relation<br />
Accountable<br />
Referential<br />
Referent<br />
Projected<br />
Future actions<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
Context<br />
Situation
Situation<br />
Context<br />
SOURCE<br />
Formulates<br />
Encodes<br />
Trans-situational<br />
grounds<br />
Situation<br />
Responsive<br />
MESSAGE<br />
<br />
DESTINATION<br />
Interprets<br />
Decodes<br />
CODE Expressive Mediational Directed CODE<br />
Medium / Channel<br />
Relation<br />
Accountable<br />
Referential<br />
Referent<br />
Projected<br />
Future actions<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
Context<br />
Situation
Situation<br />
Context<br />
SOURCE<br />
Formulates<br />
Encodes<br />
Trans-situational<br />
grounds<br />
Situation<br />
Responsive<br />
MESSAGE<br />
<br />
DESTINATION<br />
Interprets<br />
Decodes<br />
CODE Expressive Mediational Directed CODE<br />
Medium / Channel<br />
Relation<br />
Accountable<br />
Referential<br />
Referent<br />
Projected<br />
Future actions<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
Context<br />
Situation
Communication<br />
Transport Protocol<br />
Communication Language<br />
Interaction Protocol<br />
Representation<br />
Ontologies<br />
Knowledge Base<br />
Planning<br />
Modelling<br />
Meta-Knowledge<br />
Reasoning
Communication<br />
Transport Protocol<br />
Communication Language<br />
Interaction Protocol<br />
Representation<br />
Ontologies<br />
Knowledge Base<br />
Planning<br />
Modelling<br />
Meta-Knowledge<br />
Reasoning
Communication<br />
Transport Protocol<br />
Communication Language<br />
Interaction Protocol<br />
Representation<br />
Ontologies<br />
Knowledge Base<br />
Planning<br />
Modelling<br />
Meta-Knowledge<br />
Reasoning
Communication<br />
Transport Protocol<br />
Communication Language<br />
Interaction Protocol<br />
Representation<br />
Ontologies<br />
Knowledge Base<br />
Planning<br />
Modelling<br />
Meta-Knowledge<br />
Reasoning
<strong>Social</strong> level<br />
Semiotic level<br />
Individual level<br />
<strong>Social</strong> Constructs
<strong>Social</strong> level<br />
Semiotic level<br />
Individual level<br />
<strong>Social</strong> Constructs
<strong>Social</strong> level<br />
Semiotic level<br />
Individual level<br />
<strong>Social</strong> Constructs
<strong>Social</strong> level<br />
Semiotic level<br />
Individual level<br />
<strong>Social</strong> Constructs
<strong>Social</strong> level<br />
Semiotic level<br />
Individual level<br />
<strong>Social</strong> Constructs
<strong>Social</strong> level<br />
Semiotic level<br />
Individual level<br />
<strong>Social</strong> Constructs
<strong>Social</strong> level<br />
Semiotic level<br />
Individual level<br />
<strong>Social</strong> Constructs
Commits_to<br />
ACTOR X<br />
<strong>Cognitive</strong><br />
Architecture<br />
Knowledge<br />
Shared<br />
Personal<br />
Construct<br />
Goals<br />
Commits_to<br />
Influences<br />
Part_<strong>of</strong><br />
Signs<br />
<strong>Social</strong><br />
construct<br />
Expressed as<br />
Language<br />
action<br />
Content<br />
information<br />
Part_<strong>of</strong><br />
Signs<br />
Commits_to<br />
Influences<br />
ACTOR Y<br />
<strong>Cognitive</strong><br />
Architecture<br />
Knowledge<br />
Shared<br />
Personal<br />
Construct<br />
Goals<br />
Exists_in Context / Organization<br />
Exists_in<br />
Umwelt<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
Commits_to
Commits_to<br />
ACTOR X<br />
<strong>Cognitive</strong><br />
Architecture<br />
Knowledge<br />
Shared<br />
Personal<br />
Construct<br />
Goals<br />
Commits_to<br />
Influences<br />
Part_<strong>of</strong><br />
Signs<br />
<strong>Social</strong><br />
construct<br />
Expressed as<br />
Language<br />
action<br />
Content<br />
information<br />
Part_<strong>of</strong><br />
Signs<br />
Commits_to<br />
Influences<br />
ACTOR Y<br />
<strong>Cognitive</strong><br />
Architecture<br />
Knowledge<br />
Shared<br />
Personal<br />
Construct<br />
Goals<br />
Exists_in Context / Organization<br />
Exists_in<br />
Umwelt<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
Commits_to
Commits_to<br />
ACTOR X<br />
<strong>Cognitive</strong><br />
Architecture<br />
Knowledge<br />
Shared<br />
Personal<br />
Construct<br />
Goals<br />
Commits_to<br />
Influences<br />
Part_<strong>of</strong><br />
Signs<br />
<strong>Social</strong><br />
construct<br />
Expressed as<br />
Language<br />
action<br />
Content<br />
information<br />
Part_<strong>of</strong><br />
Signs<br />
Commits_to<br />
Influences<br />
ACTOR Y<br />
<strong>Cognitive</strong><br />
Architecture<br />
Knowledge<br />
Shared<br />
Personal<br />
Construct<br />
Goals<br />
Exists_in Context / Organization<br />
Exists_in<br />
Umwelt<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
Commits_to
Commits_to<br />
ACTOR X<br />
<strong>Cognitive</strong><br />
Architecture<br />
Knowledge<br />
Shared<br />
Personal<br />
Construct<br />
Goals<br />
Commits_to<br />
Influences<br />
Part_<strong>of</strong><br />
Signs<br />
<strong>Social</strong><br />
construct<br />
Expressed as<br />
Language<br />
action<br />
Content<br />
information<br />
Part_<strong>of</strong><br />
Signs<br />
Commits_to<br />
Influences<br />
ACTOR Y<br />
<strong>Cognitive</strong><br />
Architecture<br />
Knowledge<br />
Shared<br />
Personal<br />
Construct<br />
Goals<br />
Exists_in Context / Organization<br />
Exists_in<br />
Umwelt<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
Commits_to
Commits_to<br />
ACTOR X<br />
<strong>Cognitive</strong><br />
Architecture<br />
Knowledge<br />
Shared<br />
Personal<br />
Construct<br />
Goals<br />
Commits_to<br />
Influences<br />
Part_<strong>of</strong><br />
Signs<br />
<strong>Social</strong><br />
construct<br />
Expressed as<br />
Language<br />
action<br />
Content<br />
information<br />
Part_<strong>of</strong><br />
Signs<br />
Commits_to<br />
Influences<br />
ACTOR Y<br />
<strong>Cognitive</strong><br />
Architecture<br />
Knowledge<br />
Shared<br />
Personal<br />
Construct<br />
Goals<br />
Exists_in Context / Organization<br />
Exists_in<br />
Umwelt<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
Commits_to
Commits_to<br />
ACTOR X<br />
<strong>Cognitive</strong><br />
Architecture<br />
Knowledge<br />
Shared<br />
Personal<br />
Construct<br />
Goals<br />
Commits_to<br />
Influences<br />
Part_<strong>of</strong><br />
Signs<br />
<strong>Social</strong><br />
construct<br />
Expressed as<br />
Language<br />
action<br />
Content<br />
information<br />
Part_<strong>of</strong><br />
Signs<br />
Commits_to<br />
Influences<br />
ACTOR Y<br />
<strong>Cognitive</strong><br />
Architecture<br />
Knowledge<br />
Shared<br />
Personal<br />
Construct<br />
Goals<br />
Exists_in Context / Organization<br />
Exists_in<br />
Umwelt<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
Commits_to
Commits_to<br />
ACTOR X<br />
<strong>Cognitive</strong><br />
Architecture<br />
Knowledge<br />
Shared<br />
Personal<br />
Construct<br />
Goals<br />
Commits_to<br />
Influences<br />
Part_<strong>of</strong><br />
Signs<br />
<strong>Social</strong><br />
construct<br />
Expressed as<br />
Language<br />
action<br />
Content<br />
information<br />
Part_<strong>of</strong><br />
Signs<br />
Commits_to<br />
Influences<br />
ACTOR Y<br />
<strong>Cognitive</strong><br />
Architecture<br />
Knowledge<br />
Shared<br />
Personal<br />
Construct<br />
Goals<br />
Exists_in Context / Organization<br />
Exists_in<br />
Umwelt<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
Commits_to
Commits_to<br />
ACTOR X<br />
<strong>Cognitive</strong><br />
Architecture<br />
Knowledge<br />
Shared<br />
Personal<br />
Construct<br />
Goals<br />
Commits_to<br />
Influences<br />
Part_<strong>of</strong><br />
Signs<br />
<strong>Social</strong><br />
construct<br />
Expressed as<br />
Language<br />
action<br />
Content<br />
information<br />
Part_<strong>of</strong><br />
Signs<br />
Commits_to<br />
Influences<br />
ACTOR Y<br />
<strong>Cognitive</strong><br />
Architecture<br />
Knowledge<br />
Shared<br />
Personal<br />
Construct<br />
Goals<br />
Exists_in Context / Organization<br />
Exists_in<br />
Umwelt<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
Commits_to
<strong>The</strong> Four Meanings <strong>of</strong> “<strong>Social</strong> Construct” (SC)<br />
ACTOR (cognitive / semiotic level )<br />
1. SC = representation<br />
[<strong>Cognitive</strong> architecture]<br />
(cognitive science)<br />
COMMUNITY (<strong>Social</strong> / semiotic level)<br />
communication,<br />
rituals,<br />
learning<br />
<strong>Actor</strong> <strong>Actor</strong><br />
Semiotic level<br />
4. SC = sign in a community<br />
(Organizational semiotics)<br />
2. SC = shared<br />
normative<br />
knowledge<br />
(cognitive stream in organizational semiotics)<br />
3. SC = Authoritative<br />
message,<br />
document,<br />
event
<strong>The</strong> Four Meanings <strong>of</strong> “<strong>Social</strong> Construct” (SC)<br />
ACTOR (cognitive / semiotic level )<br />
1. SC = representation<br />
[<strong>Cognitive</strong> architecture]<br />
(cognitive science)<br />
COMMUNITY (<strong>Social</strong> / semiotic level)<br />
communication,<br />
rituals,<br />
learning<br />
<strong>Actor</strong> <strong>Actor</strong><br />
Semiotic level<br />
4. SC = sign in a community<br />
(Organizational semiotics)<br />
2. SC = shared<br />
normative<br />
knowledge<br />
(cognitive stream in organizational semiotics)<br />
3. SC = Authoritative<br />
message,<br />
document,<br />
event
CHAPTER 4<br />
<strong>The</strong> <strong>Cognitive</strong> <strong>Actor</strong>
CHAPTER 4<br />
<strong>The</strong> <strong>Cognitive</strong> <strong>Actor</strong>
CHAPTER 4<br />
<strong>The</strong> <strong>Cognitive</strong> <strong>Actor</strong>
CHAPTER 4<br />
<strong>The</strong> <strong>Cognitive</strong> <strong>Actor</strong>
CHAPTER 4<br />
<strong>The</strong> <strong>Cognitive</strong> <strong>Actor</strong>
CHAPTER 4<br />
<strong>The</strong> <strong>Cognitive</strong> <strong>Actor</strong>
CHAPTER 4<br />
<strong>The</strong> <strong>Cognitive</strong> <strong>Actor</strong>
<strong>The</strong> <strong>actor</strong><br />
Level 2<br />
Level 1<br />
Sensors Level 0<br />
Actuators
<strong>The</strong> <strong>actor</strong><br />
Level 2<br />
Level 1<br />
Sensors Level 0<br />
Actuators
Unified<br />
theory <strong>of</strong><br />
cognition<br />
implements<br />
Model <strong>of</strong><br />
chess<br />
Model <strong>of</strong> <strong>Actor</strong><br />
implements<br />
Architecure <strong>of</strong><br />
Cognition<br />
implements<br />
Model <strong>of</strong> the<br />
blocksworld<br />
implements<br />
Model <strong>of</strong><br />
language<br />
Model <strong>of</strong><br />
Planning<br />
implements<br />
Cognition
Unified<br />
theory <strong>of</strong><br />
cognition<br />
implements<br />
Model <strong>of</strong><br />
chess<br />
Model <strong>of</strong> <strong>Actor</strong><br />
implements<br />
Architecure <strong>of</strong><br />
Cognition<br />
implements<br />
Model <strong>of</strong> the<br />
blocksworld<br />
implements<br />
Model <strong>of</strong><br />
language<br />
Model <strong>of</strong><br />
Planning<br />
implements<br />
Cognition
Chunking mechanism<br />
+<br />
Production Memory<br />
Preferences Objects<br />
Working Memory<br />
Context stack<br />
Decision<br />
Procedure<br />
+/-<br />
+<br />
+<br />
-<br />
Woring-Memory<br />
Manager
Chunking mechanism<br />
+<br />
Production Memory<br />
Preferences Objects<br />
Working Memory<br />
Context stack<br />
Decision<br />
Procedure<br />
+/-<br />
+<br />
+<br />
-<br />
Woring-Memory<br />
Manager
Chunking mechanism<br />
+<br />
Production Memory<br />
Preferences Objects<br />
Working Memory<br />
Context stack<br />
Decision<br />
Procedure<br />
+/-<br />
+<br />
+<br />
-<br />
Woring-Memory<br />
Manager
Chunking mechanism<br />
+<br />
Production Memory<br />
Preferences Objects<br />
Working Memory<br />
Context stack<br />
Decision<br />
Procedure<br />
+/-<br />
+<br />
+<br />
-<br />
Woring-Memory<br />
Manager
Chunking mechanism<br />
+<br />
Production Memory<br />
Preferences Objects<br />
Working Memory<br />
Context stack<br />
Decision<br />
Procedure<br />
+/-<br />
+<br />
+<br />
-<br />
Woring-Memory<br />
Manager
Chunking mechanism<br />
+<br />
Production Memory<br />
Preferences Objects<br />
Working Memory<br />
Context stack<br />
Decision<br />
Procedure<br />
+/-<br />
+<br />
+<br />
-<br />
Woring-Memory<br />
Manager
Chunking mechanism<br />
+<br />
Production Memory<br />
Preferences Objects<br />
Working Memory<br />
Context stack<br />
Decision<br />
Procedure<br />
+/-<br />
+<br />
+<br />
-<br />
Woring-Memory<br />
Manager
Chunking mechanism<br />
+<br />
Production Memory<br />
Preferences Objects<br />
Working Memory<br />
Context stack<br />
Decision<br />
Procedure<br />
+/-<br />
+<br />
+<br />
-<br />
Woring-Memory<br />
Manager
Chunking mechanism<br />
+<br />
Production Memory<br />
Preferences Objects<br />
Working Memory<br />
Context stack<br />
Decision<br />
Procedure<br />
+/-<br />
+<br />
+<br />
-<br />
Woring-Memory<br />
Manager
Chunking mechanism<br />
+<br />
Production Memory<br />
Preferences Objects<br />
Working Memory<br />
Context stack<br />
Decision<br />
Procedure<br />
+/-<br />
+<br />
+<br />
-<br />
Woring-Memory<br />
Manager
Chunking mechanism<br />
+<br />
Production Memory<br />
Preferences Objects<br />
Working Memory<br />
Context stack<br />
Decision<br />
Procedure<br />
+/-<br />
+<br />
+<br />
-<br />
Woring-Memory<br />
Manager
Intentional Module<br />
(not identified)<br />
Declarative Module<br />
Goal Buffer Retrieval Buffer<br />
Productions<br />
Matching<br />
Selection<br />
Execution<br />
Visual Buffer Manual Buffer<br />
Visual Module Manual Module<br />
External World<br />
Central<br />
Production<br />
System
Intentional Module<br />
(not identified)<br />
Declarative Module<br />
Goal Buffer Retrieval Buffer<br />
Productions<br />
Matching<br />
Selection<br />
Execution<br />
Visual Buffer Manual Buffer<br />
Visual Module Manual Module<br />
External World<br />
Central<br />
Production<br />
System
Chunk: addition_fact7<br />
ChunkType:addition_fact<br />
Slot_1<br />
Slot_2<br />
Slot_3<br />
Addend1<br />
Addend2<br />
Addend3<br />
3<br />
4<br />
7
= + ∑ + ɛ <br />
<br />
<br />
<br />
σ <br />
<br />
<br />
<br />
<br />
<br />
= <br />
<br />
<br />
∑<br />
= −<br />
<br />
<br />
+ β <br />
<br />
<br />
<br />
<br />
β
= + ∑ + ɛ <br />
<br />
<br />
<br />
σ <br />
<br />
<br />
<br />
<br />
<br />
= <br />
<br />
<br />
∑<br />
= −<br />
<br />
<br />
+ β <br />
<br />
<br />
<br />
<br />
β
Requested Retrieval<br />
W1<br />
Addend1: 3<br />
Addend2: 4<br />
W2<br />
Source 1<br />
3<br />
Source 2<br />
4<br />
S11<br />
S23<br />
S21<br />
S12<br />
S22<br />
S13<br />
Chunk 1<br />
Addend1: 3<br />
Addend2: 2<br />
Sum: 5<br />
Chunk 2<br />
Addend1: 3<br />
Addend2: 4<br />
Sum: 7<br />
Chunk 3<br />
Addend1: 3<br />
Addend2: 7<br />
Sum: 10<br />
<br />
<br />
<br />
= ∑ <br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
= ∗ + ∗ = ∗ + ∗ = <br />
= ∗ + ∗ = ∗ + ∗ = <br />
= ∗ + ∗ = ∗ + ∗ =
= − () <br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
= ∗ ( − ) + ∗ <br />
= ∗ ( − ) + ∗ ( − )<br />
= ∗ ( − ) + ∗ <br />
<br />
<br />
<br />
<br />
<br />
<br />
= ∑ − <br />
<br />
<br />
<br />
= ∗ (| − | + | − |) <br />
<br />
<br />
<br />
<br />
= ( ∗ + ∗ ) − ∗ (| − | + | − |) = − ∗ <br />
= ( ∗ + ∗ ) − ∗ (| − | + | − |) = <br />
= ( ∗ + ∗ ) − ∗ (| − | + | − |) = − ∗
τ <br />
<br />
τ <br />
τ <br />
<br />
<br />
<br />
<br />
=<br />
+ −(−τ) <br />
<br />
τ <br />
= √ σπ σ
= <br />
∑ <br />
= + <br />
<br />
<br />
√ <br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
= + ∗ −
= ∑ <br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
τ <br />
<br />
= ∗ −τ
→ →
Goal condition<br />
+<br />
Chunk retrieval(s)<br />
Goal stack transformation<br />
+<br />
Other module interaction<br />
<br />
<br />
<br />
<br />
<br />
<br />
Procedure : Check_vision<br />
Condition<br />
=goal<br />
ChunkType running<br />
Slot_1 status check_vision<br />
=perception (retrieval request)<br />
ChunkType car<br />
Slot_1 distance too_close<br />
Slot_2 driving_side =driving_side<br />
Action<br />
=goal<br />
ChunkType running<br />
Slot_1 status evade<br />
Slot_2 pass_side =driving_side
Check vision<br />
=goal><br />
ChunkType running<br />
status check vision<br />
=perception><br />
ChunkType car<br />
distance too close<br />
driving side =driving side<br />
=⇒<br />
=motor><br />
ChunkType action<br />
pass side =driving side
Check vision<br />
=goal><br />
ChunkType running<br />
status check vision<br />
=perception><br />
ChunkType car<br />
distance too close<br />
driving side =driving side<br />
=⇒<br />
=motor><br />
ChunkType action<br />
pass side =driving side
Check vision<br />
=goal><br />
ChunkType running<br />
status check vision<br />
=perception><br />
ChunkType car<br />
distance too close<br />
driving side =driving side<br />
=⇒<br />
=motor><br />
ChunkType action<br />
pass side =driving side
= <br />
<br />
<br />
∑<br />
<br />
= −<br />
<br />
<br />
+ β
= ∗ − + σ <br />
<br />
<br />
<br />
<br />
<br />
σ <br />
σ <br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
= ∗
= + <br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
=<br />
<br />
=<br />
+ +
=<br />
α + <br />
α + β + + <br />
α <br />
β <br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
=<br />
+ <br />
<br />
<br />
<br />
= <br />
+
+<br />
=<br />
+<br />
∑ <br />
<br />
α + β + + <br />
<br />
∑ <br />
<br />
α <br />
β <br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
=<br />
<br />
∑<br />
= −
=<br />
<br />
<br />
∑<br />
= −
=<br />
<br />
<br />
∑<br />
= −
Procedural<br />
Memory<br />
Procedures<br />
Condition<br />
Action<br />
New<br />
Procedure<br />
Get<br />
current<br />
goal<br />
Motor<br />
Module<br />
Goal Module<br />
Goal Stack<br />
Top Goal<br />
Current goal<br />
New Goal<br />
ACT-R Engine<br />
Matching<br />
Conflict Resolution<br />
Execution<br />
Production<br />
Compilation<br />
Perception<br />
Module<br />
Pop goal(-)<br />
Push<br />
goal(+)<br />
Modify<br />
goal(=)<br />
Retrieval<br />
Request<br />
Retrieval<br />
Request<br />
<br />
Declarative<br />
Memory<br />
<br />
Popped<br />
goal<br />
Chunks<br />
Add /<br />
Merge<br />
Chunk
(a) Goal and Production Rule Level<br />
Push<br />
G<br />
G’ = r2G – b2<br />
1 2<br />
P1<br />
q3, a3<br />
(b) Conflict Resolution Level<br />
q2, a2<br />
r3, b3<br />
Pop<br />
Push 3 4 5<br />
P2 P3 P4 P5<br />
P3(PG’ - C = 17.95) P4(PG’ - C = 17.80)<br />
Retrieval Failure Time Fe -fτ<br />
Retrieval Failure Time Fe -fA12<br />
(c) Chunk Retrieval Level: Ai = Bi + ΣWjSji - Dip<br />
W8<br />
W4<br />
Eight<br />
Four<br />
a’2<br />
Eight<br />
Four<br />
Twelve<br />
r2, b2<br />
6 7<br />
P6<br />
Goal 4 Addition-fact 12<br />
Goal 5<br />
S8,12<br />
S4,12<br />
B12<br />
P7<br />
Pop<br />
P4 Action<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
′ <br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
q4, a4<br />
r4, b4<br />
q5, a5<br />
r5, b5<br />
Eight<br />
Four<br />
Twelve
′ <br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
′ <br />
<br />
<br />
<br />
′ = + = ∗ − <br />
<br />
<br />
<br />
<br />
<br />
′ <br />
′
−τ <br />
<br />
<br />
− <br />
<br />
<br />
<br />
() <br />
<br />
() = ( ′ ) + () + () + ()<br />
<br />
<br />
<br />
<br />
<br />
< () ( ) >=< () ( ) ><br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
() = () = () = () = () = ()<br />
<br />
<br />
() = () = () = () = () = ()<br />
<br />
<br />
( ) = ( ) + ( )
( ′ )
( ′ )
− <br />
<br />
<br />
<br />
− <br />
<br />
<br />
− <br />
<br />
− µ
− <br />
<br />
<br />
<br />
− <br />
<br />
<br />
− <br />
<br />
− µ
− <br />
<br />
<br />
<br />
− <br />
<br />
<br />
− <br />
<br />
− µ
− <br />
<br />
<br />
<br />
− <br />
<br />
<br />
− <br />
<br />
− µ
− <br />
<br />
<br />
<br />
− <br />
<br />
<br />
− <br />
<br />
− µ
− <br />
<br />
<br />
<br />
− <br />
<br />
<br />
− <br />
<br />
− µ
− <br />
<br />
<br />
<br />
− <br />
<br />
<br />
− <br />
<br />
− µ
CHAPTER 5<br />
RBot: Architecture and Design
CHAPTER 5<br />
RBot: Architecture and Design
CHAPTER 5<br />
RBot: Architecture and Design
CHAPTER 5<br />
RBot: Architecture and Design
Explicit Invocation<br />
is-a is-a<br />
Client-Server Peer-to-Peer<br />
Is-a<br />
Remote Procedure Call<br />
Component Interaction View<br />
alternatives Implicit Invocation<br />
Message Queueing<br />
is-a<br />
Publish-Subscribe<br />
Distributed Communication View
Tier 1: Clients<br />
Client / <strong>Actor</strong> 1<br />
Client / <strong>Actor</strong> ...<br />
Client / <strong>Actor</strong> n<br />
Server<br />
Mixed Tier<br />
Mixed functionality<br />
Task environment<br />
Backend<br />
Server<br />
Tier 3: Backend<br />
Client<br />
Data Presentation
Tier 1: Clients<br />
Client / <strong>Actor</strong> 1<br />
Client / <strong>Actor</strong> ...<br />
Client / <strong>Actor</strong> n<br />
Server<br />
Mixed Tier<br />
Mixed functionality<br />
Task environment<br />
Backend<br />
Server<br />
Tier 3: Backend<br />
Client<br />
Data Presentation
6. get data<br />
View 2<br />
4. notify<br />
7. get data<br />
View 1<br />
3. notify<br />
Model<br />
5. notify<br />
8. get data<br />
1. user input<br />
Controller 1<br />
2. modify data
6. get data<br />
View 2<br />
4. notify<br />
7. get data<br />
View 1<br />
3. notify<br />
Model<br />
5. notify<br />
8. get data<br />
1. user input<br />
Controller 1<br />
2. modify data
Goal list (feeder)<br />
GoalStack<br />
Message MemoryMap<br />
<strong>Cognitive</strong> engine<br />
Goal handler Declarative MemoryMap<br />
Matching<br />
Conflict resolution<br />
Execution<br />
ACTOR<br />
Physical MemoryMap Peception MemoryMap<br />
External World / Simulation (Task) Environment<br />
Procedural MemoryMap<br />
<strong>Social</strong> Construct MemoryMap
Goal list (feeder)<br />
GoalStack<br />
Message MemoryMap<br />
<strong>Cognitive</strong> engine<br />
Goal handler Declarative MemoryMap<br />
Matching<br />
Conflict resolution<br />
Execution<br />
ACTOR<br />
Physical MemoryMap Peception MemoryMap<br />
External World / Simulation (Task) Environment<br />
Procedural MemoryMap<br />
<strong>Social</strong> Construct MemoryMap
Stack<br />
-List Chunk<br />
MemoryMap<br />
-List Chunk<br />
Buffer<br />
-List Chunk
in<br />
MemoryMap<br />
Buffer<br />
Chunk<br />
(ChunkType X)<br />
Chunk<br />
(ChunkType Y)<br />
Chunk<br />
(ChunkType Y)<br />
Chunk<br />
(ChunkType X)<br />
Chunk<br />
(ChunkType X)<br />
Chunks with<br />
chunktype label X<br />
out<br />
Chunks with<br />
chunktype label Y
in<br />
MemoryMap<br />
Buffer<br />
Chunk<br />
(ChunkType X)<br />
Chunk<br />
(ChunkType Y)<br />
Chunk<br />
(ChunkType Y)<br />
Chunk<br />
(ChunkType X)<br />
Chunk<br />
(ChunkType X)<br />
Chunks with<br />
chunktype label X<br />
out<br />
Chunks with<br />
chunktype label Y
MemoryMap<br />
Entrance<br />
Chunk<br />
Link<br />
Chunk
Memory<br />
+List : Memorymap<br />
+Name : string<br />
+ChunkType : ChunkType<br />
1<br />
1..*<br />
Memorymap::Stack<br />
-Chunks : Chunk<br />
-Name : string<br />
-Memory : Memory<br />
1<br />
1<br />
<strong>Actor</strong><br />
-has<br />
-has<br />
Memorymap<br />
-List : Chunk<br />
-Name : string<br />
-List : NormListener<br />
-has<br />
Memorymap::Buffer<br />
-size : int<br />
-Chunks : Chunk<br />
-has<br />
1<br />
«implementation class»Rhythm<br />
+timeElapsed() : RhythmListener<br />
1 0..*<br />
1..*<br />
RhythmListener<br />
ChunkType<br />
-List : Slot<br />
1<br />
1<br />
-defines<br />
MemoryComponent::Chunk<br />
-Name : string<br />
-List : Slot<br />
-Chunktype : ChunkType<br />
Chunk::ProcedureChunk<br />
-procedureProperties<br />
2<br />
1<br />
-has<br />
1<br />
MemoryComponent<br />
-Name : string<br />
-ActivationValue : double<br />
-PresentationTimes : object<br />
+timeElapsed() : Rhythm<br />
+updateActivation() : void<br />
+calculateActivation() : double<br />
1 *<br />
1..*<br />
-Name : string<br />
-List : Chunk<br />
Slot<br />
-Name : string<br />
-Value : object<br />
MemoryComponent::Link
Memory<br />
+List : Memorymap<br />
+Name : string<br />
+ChunkType : ChunkType<br />
1<br />
1..*<br />
Memorymap::Stack<br />
-Chunks : Chunk<br />
-Name : string<br />
-Memory : Memory<br />
1<br />
1<br />
<strong>Actor</strong><br />
-has<br />
-has<br />
Memorymap<br />
-List : Chunk<br />
-Name : string<br />
-List : NormListener<br />
-has<br />
Memorymap::Buffer<br />
-size : int<br />
-Chunks : Chunk<br />
-has<br />
1<br />
«implementation class»Rhythm<br />
+timeElapsed() : RhythmListener<br />
1 0..*<br />
1..*<br />
RhythmListener<br />
ChunkType<br />
-List : Slot<br />
1<br />
1<br />
-defines<br />
MemoryComponent::Chunk<br />
-Name : string<br />
-List : Slot<br />
-Chunktype : ChunkType<br />
Chunk::ProcedureChunk<br />
-procedureProperties<br />
2<br />
1<br />
-has<br />
1<br />
MemoryComponent<br />
-Name : string<br />
-ActivationValue : double<br />
-PresentationTimes : object<br />
+timeElapsed() : Rhythm<br />
+updateActivation() : void<br />
+calculateActivation() : double<br />
1 *<br />
1..*<br />
-Name : string<br />
-List : Chunk<br />
Slot<br />
-Name : string<br />
-Value : object<br />
MemoryComponent::Link
Condition-side<br />
Action-side<br />
Dynamic Slot Name<br />
DEMANDS<br />
D2<br />
D3<br />
DSN<br />
D1<br />
RULES<br />
C2<br />
A1<br />
C1<br />
P1<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
P2<br />
A2<br />
RULES<br />
D4<br />
DEMANDS<br />
Dynamic Slot Name<br />
Condition-side<br />
Action-side
Condition-side<br />
Action-side<br />
Dynamic Slot Name<br />
DEMANDS<br />
D2<br />
D3<br />
DSN<br />
D1<br />
RULES<br />
C2<br />
A1<br />
C1<br />
P1<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
P2<br />
A2<br />
RULES<br />
D4<br />
DEMANDS<br />
Dynamic Slot Name<br />
Condition-side<br />
Action-side
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
NormListener<br />
Memory::Memorymap<br />
-List : Chunk<br />
-Name : string<br />
-List : NormListener<br />
-Map : Memorymap<br />
NormCondition<br />
Chunk::<strong>Social</strong> Construct<br />
-List : Norm<br />
Norm<br />
-List : NormCondition<br />
-List : NormAction<br />
+notifyNormOfAddedChunk(in 1 : Memorymap, in 2 : Chunk)<br />
+notifytNormOfDeletedChunk(in 1 : Memorymap, in 2 : Chunk)<br />
+notifytNormOfModifiedChunk(in 1 : Memorymap, in 2 : Chunk)<br />
NormAction<br />
-Map : ProcedureChunk<br />
-DeonticOperator : int<br />
+executeNormAction()<br />
+retractNormAction()
NormListener<br />
Memory::Memorymap<br />
-List : Chunk<br />
-Name : string<br />
-List : NormListener<br />
-Map : Memorymap<br />
NormCondition<br />
Chunk::<strong>Social</strong> Construct<br />
-List : Norm<br />
Norm<br />
-List : NormCondition<br />
-List : NormAction<br />
+notifyNormOfAddedChunk(in 1 : Memorymap, in 2 : Chunk)<br />
+notifytNormOfDeletedChunk(in 1 : Memorymap, in 2 : Chunk)<br />
+notifytNormOfModifiedChunk(in 1 : Memorymap, in 2 : Chunk)<br />
NormAction<br />
-Map : ProcedureChunk<br />
-DeonticOperator : int<br />
+executeNormAction()<br />
+retractNormAction()
No<br />
(P)<br />
GoalFeeder contains goals<br />
(B)<br />
Yes<br />
Current goal<br />
No<br />
<strong>Actor</strong> sleeps and waits for new goals<br />
Select Matching procedures Check condition side procedures<br />
(G)<br />
GoalStack empty?<br />
(A)<br />
Feed goal<br />
Assign Failure<br />
Modify goal<br />
add goal<br />
remove goal (goal solved)<br />
(F)<br />
Drop goal<br />
Assign Succes<br />
(C)<br />
(H)<br />
(D)<br />
Is Match and add<br />
Conflict resolution<br />
Select procedure with highest utility<br />
Retrieval <strong>of</strong> additional chunks necessary?<br />
Transform goalstack<br />
Set <strong>of</strong> potential procedures > 0 ?<br />
No<br />
(J)<br />
Yes<br />
No<br />
(K) (O)<br />
Yes<br />
Chunks retrieved<br />
Execute procedure<br />
Transform MemoryMap<br />
<br />
(E)<br />
GoalFeeder<br />
Set procedures : Memorymap<br />
Set potential procedures : Memorymap<br />
Sorted Set potential procedures : Memorymap<br />
(I)<br />
Retrieve chunks<br />
GoalHandler<br />
(N)<br />
Remove procedure from set<br />
(L)<br />
(M)<br />
Assign Failure<br />
Retrieval failure<br />
Other chunks in other : Memorymap
No<br />
(P)<br />
GoalFeeder contains goals<br />
(B)<br />
Yes<br />
Current goal<br />
No<br />
<strong>Actor</strong> sleeps and waits for new goals<br />
Select Matching procedures Check condition side procedures<br />
(G)<br />
GoalStack empty?<br />
(A)<br />
Feed goal<br />
Assign Failure<br />
Modify goal<br />
add goal<br />
remove goal (goal solved)<br />
(F)<br />
Drop goal<br />
Assign Succes<br />
(C)<br />
(H)<br />
(D)<br />
Is Match and add<br />
Conflict resolution<br />
Select procedure with highest utility<br />
Retrieval <strong>of</strong> additional chunks necessary?<br />
Transform goalstack<br />
Set <strong>of</strong> potential procedures > 0 ?<br />
No<br />
(J)<br />
Yes<br />
No<br />
(K) (O)<br />
Yes<br />
Chunks retrieved<br />
Execute procedure<br />
Transform MemoryMap<br />
<br />
(E)<br />
GoalFeeder<br />
Set procedures : Memorymap<br />
Set potential procedures : Memorymap<br />
Sorted Set potential procedures : Memorymap<br />
(I)<br />
Retrieve chunks<br />
GoalHandler<br />
(N)<br />
Remove procedure from set<br />
(L)<br />
(M)<br />
Assign Failure<br />
Retrieval failure<br />
Other chunks in other : Memorymap
Go to B<br />
push push push<br />
Take a step<br />
B not<br />
reached?<br />
pop<br />
Take a step<br />
B not<br />
reached?<br />
pop<br />
Take a step<br />
B not<br />
reached?<br />
<br />
pop<br />
B reached!<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
pop
Rhythm T := T + 1<br />
Position Handler<br />
Checking change <strong>of</strong> position<br />
No change <strong>of</strong> position<br />
<strong>Actor</strong><br />
Position is changed<br />
Send change<br />
Physical<br />
memory map<br />
PerceptionHandler<br />
<br />
Environment
Chunk name: message x ChunkType: Message<br />
Receiver <strong>actor</strong> name<br />
Object socialconstruct | goal | procedure<br />
Objectname name
[ ∅]<br />
<br />
<br />
<br />
<br />
<br />
= ( − ) − + ( − ) − + ( − ) − =
memorymap<br />
<strong>Social</strong> construct<br />
Norm<br />
Condition Action<br />
UTILITY before influence <strong>of</strong><br />
social constructs<br />
P1<br />
P2<br />
UTILITY after influence <strong>of</strong><br />
social constructs
memorymap<br />
<strong>Social</strong> construct<br />
Norm<br />
Condition Action<br />
UTILITY before influence <strong>of</strong><br />
social constructs<br />
P1<br />
P2<br />
UTILITY after influence <strong>of</strong><br />
social constructs
memorymap<br />
<strong>Social</strong> construct<br />
Norm<br />
Condition Action<br />
UTILITY before influence <strong>of</strong><br />
social constructs<br />
P1<br />
P2<br />
UTILITY after influence <strong>of</strong><br />
social constructs
<strong>Actor</strong> (n)<br />
Model 1<br />
Server Database<br />
<strong>Actor</strong> (n – 1)<br />
<strong>Actor</strong> (1)<br />
<strong>Actor</strong> (n)<br />
Database<br />
Model 2<br />
Server<br />
<strong>Actor</strong> (n – 1)<br />
<strong>Actor</strong> (1)
<strong>Actor</strong> (n)<br />
Model 1<br />
Server Database<br />
<strong>Actor</strong> (n – 1)<br />
<strong>Actor</strong> (1)<br />
<strong>Actor</strong> (n)<br />
Database<br />
Model 2<br />
Server<br />
<strong>Actor</strong> (n – 1)<br />
<strong>Actor</strong> (1)
<strong>Actor</strong> <strong>Actor</strong>Parser Server<br />
connect<br />
XML<br />
return<br />
Connected<br />
XML<br />
Register<br />
ServerParser<br />
Send confirm<br />
Register<br />
ServerRegister<br />
Create Symbol<br />
SymbolAttributeMap Environment<br />
return<br />
Add <strong>actor</strong> Symbol<br />
<br />
<br />
Create drawing<br />
return<br />
<strong>Actor</strong>Draw<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
Sim0 Sim1 Sim2 Sim3<br />
e1 e2 e3
∆<br />
∆ <br />
<br />
∆ <br />
<br />
<br />
<br />
Sim0 = 0 Sim1 = ∆T Sim2 = 2∆T<br />
∆T ∆T ∆T<br />
e1<br />
<br />
e2<br />
e3<br />
Sim3 = 3∆T<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
∆ <br />
<br />
∆ ′ <br />
<br />
∆ ′
e2<br />
e1 e2 e3<br />
e3<br />
<br />
Sim0 Sim1 Sim2<br />
∆T ∆T’<br />
e1<br />
e4 e5 e6<br />
e4 e5 e6 e7<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
Yes<br />
Server <strong>simulation</strong> clock<br />
No<br />
Launch All <strong>Actor</strong>s<br />
Simulation time := time +1<br />
<strong>Actor</strong>(s)<br />
Send timerPrepare<br />
Create timerPrepareMessage<br />
Create Confirm prepareTime<br />
All <strong>actor</strong>s prepared?<br />
Yes<br />
Simulation suspended?<br />
No<br />
Create timer update<br />
All <strong>actor</strong>s timer Updated?<br />
No<br />
Yes<br />
Send confirm timerPrepare<br />
Send timer Update<br />
Send confirm timer Update<br />
RhythmTime= New time
e2<br />
e1 e2 e3<br />
e3<br />
<br />
Sim0 Sim1 Sim2<br />
∆T ∆T’<br />
e1<br />
e4 e5 e6<br />
e4 e5 e6 e7<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
Yes<br />
Server <strong>simulation</strong> clock<br />
No<br />
Launch All <strong>Actor</strong>s<br />
Simulation time := time +1<br />
<strong>Actor</strong>(s)<br />
Send timerPrepare<br />
Create timerPrepareMessage<br />
Create Confirm prepareTime<br />
All <strong>actor</strong>s prepared?<br />
Yes<br />
Simulation suspended?<br />
No<br />
Create timer update<br />
All <strong>actor</strong>s timer Updated?<br />
No<br />
Yes<br />
Send confirm timerPrepare<br />
Send timer Update<br />
Send confirm timer Update<br />
RhythmTime= New time
(performative<br />
: sender <strong>actor</strong> x<br />
: receiver <strong>actor</strong> y<br />
: content (...)<br />
: language XML<br />
: ontology <strong>Social</strong> Construct DTD<br />
)<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
(performative<br />
: sender <strong>actor</strong> x<br />
: receiver <strong>actor</strong> y<br />
: content (...)<br />
: language XML<br />
: ontology <strong>Social</strong> Construct DTD<br />
)<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
Server<br />
Environment<br />
A<br />
Perceivable area<br />
<br />
<br />
B
SyncRythm<br />
Pool Server<br />
Time = T<br />
T = T + 1<br />
Environment<br />
Update <strong>actor</strong>draw<br />
No<br />
Update symbols<br />
Symbols in range?<br />
Out range<br />
Was connected?<br />
Yes<br />
Remove symbol<br />
<strong>Actor</strong>Draw<br />
In range<br />
Already connected?<br />
No<br />
Add symbol<br />
No<br />
Yes<br />
Symbol change?<br />
Yes<br />
Modify symbol<br />
<strong>Actor</strong><br />
Modify chunk in perception<br />
Add chunk to perception<br />
Modify message Remove chunk from perception<br />
Add message<br />
Remove message<br />
Calibrate and rank perceptionbuffer
SyncRythm<br />
Pool Server<br />
Time = T<br />
T = T + 1<br />
Environment<br />
Update <strong>actor</strong>draw<br />
No<br />
Update symbols<br />
Symbols in range?<br />
Out range<br />
Was connected?<br />
Yes<br />
Remove symbol<br />
<strong>Actor</strong>Draw<br />
In range<br />
Already connected?<br />
No<br />
Add symbol<br />
No<br />
Yes<br />
Symbol change?<br />
Yes<br />
Modify symbol<br />
<strong>Actor</strong><br />
Modify chunk in perception<br />
Add chunk to perception<br />
Modify message Remove chunk from perception<br />
Add message<br />
Remove message<br />
Calibrate and rank perceptionbuffer
SyncRythm<br />
Pool Server<br />
Time = T<br />
T = T + 1<br />
Environment<br />
Update <strong>actor</strong>draw<br />
No<br />
Update symbols<br />
Symbols in range?<br />
Out range<br />
Was connected?<br />
Yes<br />
Remove symbol<br />
<strong>Actor</strong>Draw<br />
In range<br />
Already connected?<br />
No<br />
Add symbol<br />
No<br />
Yes<br />
Symbol change?<br />
Yes<br />
Modify symbol<br />
<strong>Actor</strong><br />
Modify chunk in perception<br />
Add chunk to perception<br />
Modify message Remove chunk from perception<br />
Add message<br />
Remove message<br />
Calibrate and rank perceptionbuffer
SyncRythm<br />
Pool Server<br />
Time = T<br />
T = T + 1<br />
Environment<br />
Update <strong>actor</strong>draw<br />
No<br />
Update symbols<br />
Symbols in range?<br />
Out range<br />
Was connected?<br />
Yes<br />
Remove symbol<br />
<strong>Actor</strong>Draw<br />
In range<br />
Already connected?<br />
No<br />
Add symbol<br />
No<br />
Yes<br />
Symbol change?<br />
Yes<br />
Modify symbol<br />
<strong>Actor</strong><br />
Modify chunk in perception<br />
Add chunk to perception<br />
Modify message Remove chunk from perception<br />
Add message<br />
Remove message<br />
Calibrate and rank perceptionbuffer
SyncRythm<br />
Pool Server<br />
Time = T<br />
T = T + 1<br />
Environment<br />
Update <strong>actor</strong>draw<br />
No<br />
Update symbols<br />
Symbols in range?<br />
Out range<br />
Was connected?<br />
Yes<br />
Remove symbol<br />
<strong>Actor</strong>Draw<br />
In range<br />
Already connected?<br />
No<br />
Add symbol<br />
No<br />
Yes<br />
Symbol change?<br />
Yes<br />
Modify symbol<br />
<strong>Actor</strong><br />
Modify chunk in perception<br />
Add chunk to perception<br />
Modify message Remove chunk from perception<br />
Add message<br />
Remove message<br />
Calibrate and rank perceptionbuffer
CHAPTER 6<br />
Demonstrative experiments with RBot and MRS
CHAPTER 6<br />
Demonstrative experiments with RBot and MRS
Redefinition<br />
Solutions/<br />
Understanding<br />
Experimentation<br />
Solution Verification<br />
Experimentation Validation<br />
Real World<br />
Data Verification<br />
Experimental<br />
Model<br />
Conceptual model Verification<br />
and Validation<br />
Experiment<br />
Validation<br />
Conceptual Modelling<br />
Program<br />
Validation<br />
Conceptual<br />
Model<br />
Computer<br />
Model<br />
Design <strong>of</strong> Experiments<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
Model Coding
Redefinition<br />
Solutions/<br />
Understanding<br />
Experimentation<br />
Solution Verification<br />
Experimentation Validation<br />
Real World<br />
Data Verification<br />
Experimental<br />
Model<br />
Conceptual model Verification<br />
and Validation<br />
Experiment<br />
Validation<br />
Conceptual Modelling<br />
Program<br />
Validation<br />
Conceptual<br />
Model<br />
Computer<br />
Model<br />
Design <strong>of</strong> Experiments<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
Model Coding
Redefinition<br />
Solutions/<br />
Understanding<br />
Experimentation<br />
Solution Verification<br />
Experimentation Validation<br />
Real World<br />
Data Verification<br />
Experimental<br />
Model<br />
Conceptual model Verification<br />
and Validation<br />
Experiment<br />
Validation<br />
Conceptual Modelling<br />
Program<br />
Validation<br />
Conceptual<br />
Model<br />
Computer<br />
Model<br />
Design <strong>of</strong> Experiments<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
Model Coding
Redefinition<br />
Solutions/<br />
Understanding<br />
Experimentation<br />
Solution Verification<br />
Experimentation Validation<br />
Real World<br />
Data Verification<br />
Experimental<br />
Model<br />
Conceptual model Verification<br />
and Validation<br />
Experiment<br />
Validation<br />
Conceptual Modelling<br />
Program<br />
Validation<br />
Conceptual<br />
Model<br />
Computer<br />
Model<br />
Design <strong>of</strong> Experiments<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
Model Coding
Solutions/<br />
understanding<br />
Real World<br />
(<strong>multi</strong> <strong>actor</strong><br />
problem)<br />
Experimental<br />
Model<br />
<strong>of</strong> <strong>multi</strong>ple<br />
<strong>actor</strong>s<br />
Solutions/<br />
understanding<br />
Multi-<strong>Actor</strong> Simulation Development Cycle<br />
Single <strong>Actor</strong> Simulation Development Cycle<br />
Real World<br />
(problem)<br />
Experimental<br />
Model <strong>of</strong><br />
single <strong>actor</strong><br />
Multi <strong>actor</strong><br />
model<br />
<strong>Actor</strong> n<br />
ACT-R<br />
<strong>Actor</strong> n-1<br />
<strong>The</strong>ory<br />
ACT-R<br />
<strong>Actor</strong> 1<br />
<strong>The</strong>ory<br />
ACT-R<br />
<strong>The</strong>ory<br />
Multi-RBOT<br />
System<br />
RBOT n<br />
RBOT n-1<br />
RBOT 1<br />
RBOT<br />
ACT-R<br />
<strong>The</strong>ory
Solutions/<br />
understanding<br />
Real World<br />
(<strong>multi</strong> <strong>actor</strong><br />
problem)<br />
Experimental<br />
Model<br />
<strong>of</strong> <strong>multi</strong>ple<br />
<strong>actor</strong>s<br />
Solutions/<br />
understanding<br />
Multi-<strong>Actor</strong> Simulation Development Cycle<br />
Single <strong>Actor</strong> Simulation Development Cycle<br />
Real World<br />
(problem)<br />
Experimental<br />
Model <strong>of</strong><br />
single <strong>actor</strong><br />
Multi <strong>actor</strong><br />
model<br />
<strong>Actor</strong> n<br />
ACT-R<br />
<strong>Actor</strong> n-1<br />
<strong>The</strong>ory<br />
ACT-R<br />
<strong>Actor</strong> 1<br />
<strong>The</strong>ory<br />
ACT-R<br />
<strong>The</strong>ory<br />
Multi-RBOT<br />
System<br />
RBOT n<br />
RBOT n-1<br />
RBOT 1<br />
RBOT<br />
ACT-R<br />
<strong>The</strong>ory
Solutions/<br />
understanding<br />
Real World<br />
(<strong>multi</strong> <strong>actor</strong><br />
problem)<br />
Experimental<br />
Model<br />
<strong>of</strong> <strong>multi</strong>ple<br />
<strong>actor</strong>s<br />
Solutions/<br />
understanding<br />
Multi-<strong>Actor</strong> Simulation Development Cycle<br />
Single <strong>Actor</strong> Simulation Development Cycle<br />
Real World<br />
(problem)<br />
Experimental<br />
Model <strong>of</strong><br />
single <strong>actor</strong><br />
Multi <strong>actor</strong><br />
model<br />
<strong>Actor</strong> n<br />
ACT-R<br />
<strong>Actor</strong> n-1<br />
<strong>The</strong>ory<br />
ACT-R<br />
<strong>Actor</strong> 1<br />
<strong>The</strong>ory<br />
ACT-R<br />
<strong>The</strong>ory<br />
Multi-RBOT<br />
System<br />
RBOT n<br />
RBOT n-1<br />
RBOT 1<br />
RBOT<br />
ACT-R<br />
<strong>The</strong>ory
carry<br />
5 1 5 5<br />
7 7 7 7<br />
12 9 3 2<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
> <br />
<br />
< <br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
+
−→ <br />
←− <br />
<br />
<br />
−→ <br />
<br />
<br />
<br />
<br />
←− <br />
⇒ <br />
−→ <br />
<br />
<br />
<br />
<br />
←− <br />
⇒ <br />
−→ <br />
<br />
<br />
<br />
<br />
<br />
←− <br />
⇒ <br />
−→
←− <br />
<br />
<br />
−→ <br />
<br />
<br />
←−
←− <br />
<br />
<br />
−→ <br />
<br />
<br />
←−
←− <br />
<br />
<br />
−→ <br />
<br />
<br />
←−
←− <br />
<br />
<br />
−→ <br />
<br />
<br />
←−
<strong>Actor</strong> Y<br />
Right<br />
Left<br />
Left<br />
L,R<br />
L,L<br />
<strong>Actor</strong> X<br />
Right<br />
<br />
<br />
<br />
<br />
<br />
<br />
=<br />
R,R<br />
R,L<br />
+ <br />
+ + <br />
<br />
<br />
<strong>Actor</strong> Y<br />
t = 0<br />
Right<br />
Left<br />
Left<br />
1,1<br />
1,1<br />
1/2,1/2<br />
<strong>Actor</strong> X<br />
Right<br />
1,1<br />
1,1<br />
<strong>Actor</strong> X<br />
<strong>Actor</strong> Y<br />
Right<br />
Left<br />
t = 2 t = 3<br />
Left Right<br />
<strong>Actor</strong> Y<br />
Right<br />
Left<br />
1/2,1/2<br />
1/2,1/2<br />
<strong>Actor</strong> Y<br />
t = 1<br />
Right<br />
Left<br />
1/2,1/2<br />
1/2,1<br />
1/2,1/2 1/2,2/3<br />
Left<br />
Left<br />
1/2,1/2<br />
<strong>Actor</strong> X<br />
Right<br />
1,1/2<br />
1,1<br />
<strong>Actor</strong> X<br />
Right<br />
2/3,2/3<br />
2/3,1/2
<strong>Actor</strong> Y<br />
Right<br />
Left<br />
Left<br />
L,R<br />
L,L<br />
<strong>Actor</strong> X<br />
Right<br />
<br />
<br />
<br />
<br />
<br />
<br />
=<br />
R,R<br />
R,L<br />
+ <br />
+ + <br />
<br />
<br />
<strong>Actor</strong> Y<br />
t = 0<br />
Right<br />
Left<br />
Left<br />
1,1<br />
1,1<br />
1/2,1/2<br />
<strong>Actor</strong> X<br />
Right<br />
1,1<br />
1,1<br />
<strong>Actor</strong> X<br />
<strong>Actor</strong> Y<br />
Right<br />
Left<br />
t = 2 t = 3<br />
Left Right<br />
<strong>Actor</strong> Y<br />
Right<br />
Left<br />
1/2,1/2<br />
1/2,1/2<br />
<strong>Actor</strong> Y<br />
t = 1<br />
Right<br />
Left<br />
1/2,1/2<br />
1/2,1<br />
1/2,1/2 1/2,2/3<br />
Left<br />
Left<br />
1/2,1/2<br />
<strong>Actor</strong> X<br />
Right<br />
1,1/2<br />
1,1<br />
<strong>Actor</strong> X<br />
Right<br />
2/3,2/3<br />
2/3,1/2
Start Move End<br />
Check<br />
Vision<br />
Left Evade Right
Start Move End<br />
Check<br />
Vision<br />
Left Evade Right
Start Move End<br />
Check<br />
Vision<br />
Left Evade Right
Start Move End<br />
Check<br />
Vision<br />
Left Evade Right
Start Move End<br />
Check<br />
Vision<br />
Left Evade Right
Start Move End<br />
Check<br />
Vision<br />
Left Evade Right
Perception<br />
<strong>Social</strong><br />
constructs<br />
Semiotic Umwelt<br />
Affects<br />
Execution<br />
Conflict resolution<br />
Matching<br />
Cogntive engine<br />
Action<br />
Declarative<br />
memory<br />
Procedures<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
Goals
Perception<br />
<strong>Social</strong><br />
constructs<br />
Semiotic Umwelt<br />
Affects<br />
Execution<br />
Conflict resolution<br />
Matching<br />
Cogntive engine<br />
Action<br />
Declarative<br />
memory<br />
Procedures<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
Goals
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
CHAPTER 7<br />
Discussion and Conclusions
CHAPTER 7<br />
Discussion and Conclusions
CHAPTER 7<br />
Discussion and Conclusions
CHAPTER 7<br />
Discussion and Conclusions
CHAPTER 7<br />
Discussion and Conclusions
CHAPTER 7<br />
Discussion and Conclusions
CHAPTER 7<br />
Discussion and Conclusions
CHAPTER 7<br />
Discussion and Conclusions
CHAPTER 7<br />
Discussion and Conclusions
CHAPTER 7<br />
Discussion and Conclusions
CHAPTER 7<br />
Discussion and Conclusions
CHAPTER 7<br />
Discussion and Conclusions
CHAPTER 7<br />
Discussion and Conclusions
CHAPTER 7<br />
Discussion and Conclusions
CHAPTER 7<br />
Discussion and Conclusions
CHAPTER 7<br />
Discussion and Conclusions
CHAPTER 7<br />
Discussion and Conclusions
APPENDIX A<br />
Addition Productions ∗<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
∗
APPENDIX A<br />
Addition Productions ∗<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
∗
→
Bibliography
Bibliography
Bibliography
Bibliography
Bibliography
Bibliography
Bibliography
Bibliography
Bibliography
Bibliography
Bibliography
Bibliography
Bibliography
Bibliography
Bibliography
Bibliography
Bibliography
Bibliography
Bibliography
Author Index
Author Index
Author Index
Author Index
Author Index
Index
Index
Index
Index
Index
Index
Index
Index
Summary
Summary
Summary
Summary
Summary
Samenvatting
Samenvatting
Samenvatting
Samenvatting
Samenvatting
Samenvatting