Efficient Change Detection in 3D Environment for Autonomous ...
Efficient Change Detection in 3D Environment for Autonomous ...
Efficient Change Detection in 3D Environment for Autonomous ...

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
po<strong>in</strong>ts whose distance is less than a given threshold.<br />
In order to reduce the computational cost of this process,<br />
more complex metrics have been used, which <strong>in</strong>clude<br />
statistical <strong>in</strong><strong>for</strong>mation associated to the underly<strong>in</strong>g po<strong>in</strong>t<br />
distributions. The ma<strong>in</strong> disadvantage of this k<strong>in</strong>d of approach<br />
is its strong dependence on the number of distributions<br />
associated with the map.<br />
In this work, we propose to use po<strong>in</strong>t clouds to build<br />
a density function over a <strong>3D</strong> bound<strong>in</strong>g box by fitt<strong>in</strong>g a<br />
local density function to each po<strong>in</strong>t and summ<strong>in</strong>g these<br />
functions <strong>in</strong>to an accumulated global density function. This<br />
global density function is used to directly extract a boundary<br />
surface that summarizes the data with<strong>in</strong> a density <strong>in</strong>terval.<br />
This leads to a cluster<strong>in</strong>g strategy that has several important<br />
advantages: (1) It is robust to noise and outliers, (2) provides<br />
a high semantic level model which allows <strong>for</strong> Boolean set<br />
operations over different po<strong>in</strong>t clouds, and (3) it is efficient<br />
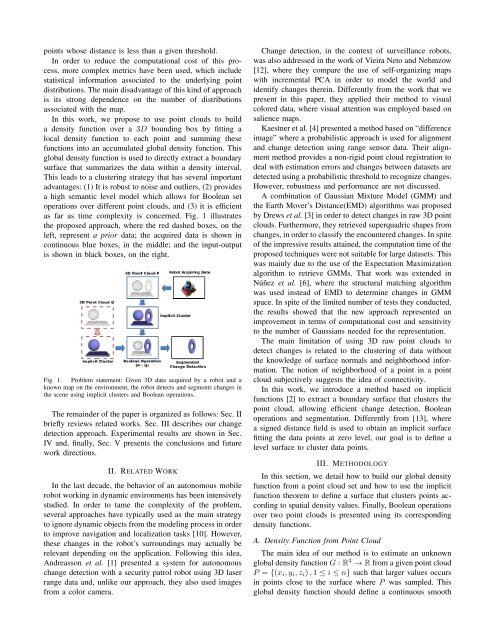
as far as time complexity is concerned. Fig. 1 illustrates<br />
the proposed approach, where the red dashed boxes, on the<br />
left, represent a prior data; the acquired data is shown <strong>in</strong><br />
cont<strong>in</strong>uous blue boxes, <strong>in</strong> the middle; and the <strong>in</strong>put-output<br />
is shown <strong>in</strong> black boxes, on the right.<br />
Fig. 1. Problem statement: Given <strong>3D</strong> data acquired by a robot and a<br />
known map on the environment, the robot detects and segments changes <strong>in</strong><br />
the scene us<strong>in</strong>g implicit clusters and Boolean operations.<br />
The rema<strong>in</strong>der of the paper is organized as follows: Sec. II<br />
briefly reviews related works. Sec. III describes our change<br />
detection approach. Experimental results are shown <strong>in</strong> Sec.<br />
IV and, f<strong>in</strong>ally, Sec. V presents the conclusions and future<br />
work directions.<br />
II. RELATED WORK<br />
In the last decade, the behavior of an autonomous mobile<br />
robot work<strong>in</strong>g <strong>in</strong> dynamic environments has been <strong>in</strong>tensively<br />
studied. In order to tame the complexity of the problem,<br />
several approaches have typically used as the ma<strong>in</strong> strategy<br />
to ignore dynamic objects from the model<strong>in</strong>g process <strong>in</strong> order<br />
to improve navigation and localization tasks [10]. However,<br />
these changes <strong>in</strong> the robot’s surround<strong>in</strong>gs may actually be<br />
relevant depend<strong>in</strong>g on the application. Follow<strong>in</strong>g this idea,<br />
Andreasson et al. [1] presented a system <strong>for</strong> autonomous<br />
change detection with a security patrol robot us<strong>in</strong>g <strong>3D</strong> laser<br />
range data and, unlike our approach, they also used images<br />
from a color camera.<br />
<strong>Change</strong> detection, <strong>in</strong> the context of surveillance robots,<br />
was also addressed <strong>in</strong> the work of Vieira Neto and Nehmzow<br />
[12], where they compare the use of self-organiz<strong>in</strong>g maps<br />
with <strong>in</strong>cremental PCA <strong>in</strong> order to model the world and<br />
identify changes there<strong>in</strong>. Differently from the work that we<br />
present <strong>in</strong> this paper, they applied their method to visual<br />
colored data, where visual attention was employed based on<br />
salience maps.<br />
Kaestner et al. [4] presented a method based on “difference<br />
image” where a probabilistic approach is used <strong>for</strong> alignment<br />
and change detection us<strong>in</strong>g range sensor data. Their alignment<br />
method provides a non-rigid po<strong>in</strong>t cloud registration to<br />
deal with estimation errors and changes between datasets are<br />
detected us<strong>in</strong>g a probabilistic threshold to recognize changes.<br />
However, robustness and per<strong>for</strong>mance are not discussed.<br />
A comb<strong>in</strong>ation of Gaussian Mixture Model (GMM) and<br />
the Earth Mover’s Distance(EMD) algorithms was proposed<br />
by Drews et al. [3] <strong>in</strong> order to detect changes <strong>in</strong> raw <strong>3D</strong> po<strong>in</strong>t<br />
clouds. Furthermore, they retrieved superquadric shapes from<br />
changes, <strong>in</strong> order to classify the encountered changes. In spite<br />
of the impressive results atta<strong>in</strong>ed, the computation time of the<br />
proposed techniques were not suitable <strong>for</strong> large datasets. This<br />
was ma<strong>in</strong>ly due to the use of the Expectation Maximization<br />
algorithm to retrieve GMMs. That work was extended <strong>in</strong><br />
Núñez et al. [6], where the structural match<strong>in</strong>g algorithm<br />
was used <strong>in</strong>stead of EMD to determ<strong>in</strong>e changes <strong>in</strong> GMM<br />
space. In spite of the limited number of tests they conducted,<br />
the results showed that the new approach represented an<br />
improvement <strong>in</strong> terms of computational cost and sensitivity<br />
to the number of Gaussians needed <strong>for</strong> the representation.<br />
The ma<strong>in</strong> limitation of us<strong>in</strong>g <strong>3D</strong> raw po<strong>in</strong>t clouds to<br />
detect changes is related to the cluster<strong>in</strong>g of data without<br />
the knowledge of surface normals and neighborhood <strong>in</strong><strong>for</strong>mation.<br />
The notion of neighborhood of a po<strong>in</strong>t <strong>in</strong> a po<strong>in</strong>t<br />
cloud subjectively suggests the idea of connectivity.<br />
In this work, we <strong>in</strong>troduce a method based on implicit<br />
functions [2] to extract a boundary surface that clusters the<br />
po<strong>in</strong>t cloud, allow<strong>in</strong>g efficient change detection, Boolean<br />
operations and segmentation. Differently from [13], where<br />
a signed distance field is used to obta<strong>in</strong> an implicit surface<br />
fitt<strong>in</strong>g the data po<strong>in</strong>ts at zero level, our goal is to def<strong>in</strong>e a<br />
level surface to cluster data po<strong>in</strong>ts.<br />
III. METHODOLOGY<br />
In this section, we detail how to build our global density<br />
function from a po<strong>in</strong>t cloud set and how to use the implicit<br />
function theorem to def<strong>in</strong>e a surface that clusters po<strong>in</strong>ts accord<strong>in</strong>g<br />
to spatial density values. F<strong>in</strong>ally, Boolean operations<br />
over two po<strong>in</strong>t clouds is presented us<strong>in</strong>g its correspond<strong>in</strong>g<br />
density functions.<br />
A. Density Function from Po<strong>in</strong>t Cloud<br />
The ma<strong>in</strong> idea of our method is to estimate an unknown<br />
global density function G : R 3 → R from a given po<strong>in</strong>t cloud<br />
P = {(xi, yi, zi) , 1 ≤ i ≤ n} such that larger values occurs<br />
<strong>in</strong> po<strong>in</strong>ts close to the surface where P was sampled. This<br />
global density function should def<strong>in</strong>e a cont<strong>in</strong>uous smooth