Control Basics - MAELabs UCSD
Control Basics - MAELabs UCSD
Control Basics - MAELabs UCSD

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
xc +<br />
-<br />
e<br />
K<br />
K = K Pe + K I<br />
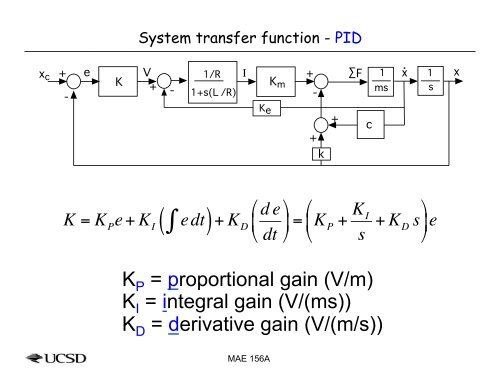
System transfer function - PID<br />
V 1/R I +<br />
Km<br />
+ - 1+s(L /R)<br />
-<br />
"<br />
( ! edt)<br />
+ KD $<br />
#<br />
Ke<br />
d e<br />
dt<br />
K P = proportional gain (V/m)<br />
K I = integral gain (V/(ms))<br />
K D = derivative gain (V/(m/s))<br />
MAE 156A<br />
+<br />
k<br />
+<br />
!F<br />
.<br />
x<br />
%<br />
' = KP +<br />
&<br />
KI s + K "<br />
%<br />
$<br />
D s'e<br />
#<br />
&<br />
c<br />
1 1<br />
ms s<br />
x