MARYLAND Orbital Maneuvering
MARYLAND Orbital Maneuvering
MARYLAND Orbital Maneuvering

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
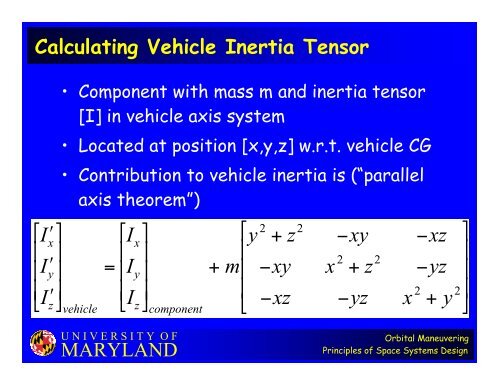
Calculating Vehicle Inertia Tensor<br />
⎡I′<br />
⎤<br />
x<br />
⎢ ⎥<br />
⎢Iy′<br />
⎥<br />
⎢<br />
⎣I′<br />
⎥<br />
⎦<br />
• Component with mass m and inertia tensor<br />
[I] in vehicle axis system<br />
• Located at position [x,y,z] w.r.t. vehicle CG<br />
• Contribution to vehicle inertia is (“parallel<br />
axis theorem”)<br />
z vehicle<br />
=<br />
⎡I<br />
⎢<br />
⎢I<br />
⎢<br />
⎣I<br />
⎤<br />
⎥<br />
⎥<br />
⎥<br />
⎦<br />
U N I V E R S I T Y O F<br />
<strong>MARYLAND</strong><br />
x<br />
y<br />
z component<br />
+<br />
⎡ 2 2<br />
y + z −xy −xz<br />
⎢<br />
2 2<br />
m⎢<br />
− xy x + z −yz<br />
⎢<br />
⎣ −xz − yz x + y<br />
2 2<br />
⎤<br />
⎥<br />
⎥<br />
⎥<br />
⎦<br />
<strong>Orbital</strong> <strong>Maneuvering</strong><br />
Principles of Space Systems Design