- Page 1 and 2: otion control SIMOVERT MASTERDRIVES
- Page 3 and 4: 1) North American Catalog SIMOVERT
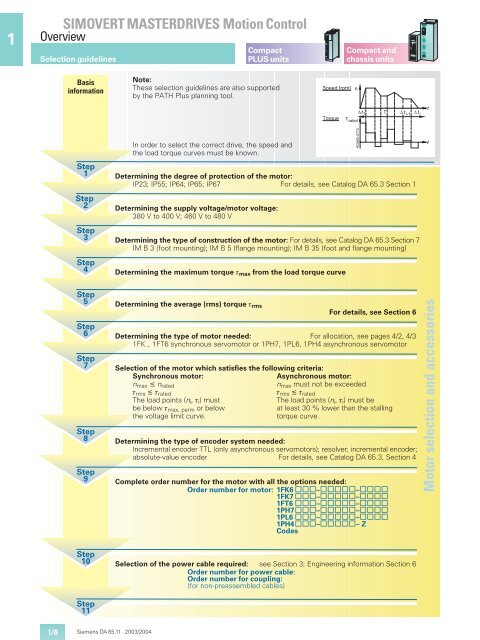
- Page 5 and 6: Motion Control Overview 1/2 Applica
- Page 7 and 8: Compact and chassis units Compact P
- Page 9: Compact and chassis units SIMOVERT
- Page 13 and 14: Motion Control Technical data 2/2 G
- Page 15 and 16: Reduction curves Permissible rated
- Page 17 and 18: Compact and chassis units Permissib
- Page 19 and 20: Motion Control Selection and orderi
- Page 21 and 22: Basic units Nominal power rating 1
- Page 23 and 24: Nominal power rating 1 ) Compact an
- Page 25 and 26: Compact and chassis units 1) See
- Page 27 and 28: Compact and chassis units Control b
- Page 29 and 30: Sound pressure level with standard
- Page 31 and 32: Sound pressure level with standard
- Page 33 and 34: Sound pressure level with standard
- Page 35 and 36: SCI1 and SCI2 interface boards (for
- Page 37 and 38: Capacitor module 1 ) DC link module
- Page 39 and 40: Nomin al power rating Compact and c
- Page 41 and 42: Rectifier units Nominal power ratin
- Page 43 and 44: Rated rectifier/ regenerative outpu
- Page 45 and 46: Nominal power rating Compact and ch
- Page 47 and 48: Inverter Nominal power rating Compa
- Page 49 and 50: Compact and chassis units SIMOVERT
- Page 51 and 52: Compact and chassis units 6FX@ 002-
- Page 53 and 54: Compact and chassis units SIMOVERT
- Page 55 and 56: Compact and chassis units SIMOVER
- Page 57 and 58: Compact and chassis units The OP1S
- Page 59 and 60: Compact and chassis units SIMOVERT
- Page 61 and 62:
Drive ES Basic Drive ES Graphic Com
- Page 63 and 64:
Compact and chassis units Software
- Page 65 and 66:
Motion Control Motor selection 4/2
- Page 67 and 68:
Compact and chassis units Motors fr
- Page 69 and 70:
Compact PLUS units Inverters with 1
- Page 71 and 72:
Compact PLUS units Inverters with a
- Page 73 and 74:
Compact and chassis units SIMOVERT
- Page 75 and 76:
Compact and chassis units SIMOVERT
- Page 77 and 78:
Compact and chassis units SIMOVERT
- Page 79 and 80:
Compact and chassis units SIMOVERT
- Page 81 and 82:
Motion Control Documentation and tr
- Page 83 and 84:
Compact and chassis units Operating
- Page 85 and 86:
Compact and chassis units SIMOVERT
- Page 87 and 88:
Compact and chassis units The start
- Page 89 and 90:
Compact and chassis units Overview
- Page 91 and 92:
Motion Control Engineering informat
- Page 93 and 94:
Compact and chassis units 3. Calcul
- Page 95 and 96:
Compact and chassis units 5. Select
- Page 97 and 98:
Compact and chassis units 8. Select
- Page 99 and 100:
Compact and chassis units 3. Max. s
- Page 101 and 102:
Thus: Compact and chassis units IMo
- Page 103 and 104:
Compact and chassis units 3. Max. s
- Page 105 and 106:
Compact and chassis units SIMOVERT
- Page 107 and 108:
Legend Compact and chassis units SI
- Page 109 and 110:
Compact and chassis units Installat
- Page 111 and 112:
Compact and chassis units X7 D' C'
- Page 113 and 114:
Compact and chassis units SIMOVERT
- Page 115 and 116:
Compact and chassis units Safe Stop
- Page 117 and 118:
Compact PLUS units Compact PLUS con
- Page 119 and 120:
Compact PLUS units Compact PLUS con
- Page 121 and 122:
Compact PLUS units Compact PLUS inv
- Page 123 and 124:
Compact PLUS units Terminals of the
- Page 125 and 126:
Compact PLUS units Compact PLUS cap
- Page 127 and 128:
Compact and chassis units Compact-t
- Page 129 and 130:
Compact and chassis units Compact-t
- Page 131 and 132:
Compact and chassis units Chassis-t
- Page 133 and 134:
Compact and chassis units Chassis-t
- Page 135 and 136:
Compact and chassis units Rectifier
- Page 137 and 138:
Compact and chassis units Applicati
- Page 139 and 140:
Compact and chassis units Electroma
- Page 141 and 142:
Compact and chassis units Rectifier
- Page 143 and 144:
Compact and chassis units Technical
- Page 145 and 146:
Compact and chassis units Overload
- Page 147 and 148:
Compact and chassis units Braking u
- Page 149 and 150:
Compact and chassis units Free-whee
- Page 151 and 152:
Compact and chassis units Component
- Page 153 and 154:
Compact and chassis units The incre
- Page 155 and 156:
Compact and chassis units Note If u
- Page 157 and 158:
Compact and chassis units X424 - Te
- Page 159 and 160:
Compact and chassis units The follo
- Page 161 and 162:
Connection X490 Compact and chassis
- Page 163 and 164:
Compact and chassis units Peer-to-p
- Page 165 and 166:
Compact and chassis units SIMOVERT
- Page 167 and 168:
Compact and chassis units Integrati
- Page 169 and 170:
Compact and chassis units USS proto
- Page 171 and 172:
Technical data of the SLB Compact a
- Page 173 and 174:
Compact and chassis units Bus conne
- Page 175 and 176:
Compact and chassis units The CAN p
- Page 177 and 178:
Overview Compact and chassis units
- Page 179 and 180:
Compact and chassis units Technolog
- Page 181 and 182:
Compact and chassis units Technolog
- Page 183 and 184:
Compact and chassis units Technolog
- Page 185 and 186:
Compact and chassis units Encoders
- Page 187 and 188:
Compact and chassis units Central c
- Page 189 and 190:
Compact and chassis units USS bus v
- Page 191 and 192:
Compact and chassis units Fig. 6/10
- Page 193 and 194:
Motion Control Dimension drawings 7
- Page 195 and 196:
360 14.2 Fig. 7/3 260 10.2 220 8.6
- Page 197 and 198:
Inverters, size J 350 13.78 67 2.64
- Page 199 and 200:
200 7.87 200 7.87 27.95 710 ø9 0.3
- Page 201 and 202:
Type b 1 4EP38 4EP39 4EP40 mm (in)
- Page 203 and 204:
Type Designation acc. to DIN 41 302
- Page 205 and 206:
Power COMBICON (2 x) Fig. 7/22 Comp
- Page 207 and 208:
Compact and chassis units Busbar su
- Page 209 and 210:
Compact and chassis units SIMOVERT
- Page 211 and 212:
Compact and chassis units SIMOVERT
- Page 213 and 214:
Compact and chassis units (continue
- Page 215 and 216:
Compact and chassis units SIMOVERT
- Page 217 and 218:
Compact and chassis units u t l d 6
- Page 219 and 220:
Compact and chassis units u t l SIM
- Page 221 and 222:
Compact and chassis units For motor
- Page 223 and 224:
Compact and chassis units For motor
- Page 225 and 226:
Motion Control Appendix A/2 Certifi
- Page 227 and 228:
Compact and chassis units SIMOVERT
- Page 229 and 230:
Compact and chassis units Compact P
- Page 231 and 232:
Compact and chassis units SIMOVERT
- Page 233 and 234:
Compact and chassis units In the fa
- Page 235 and 236:
Compact and chassis units SIMOVERT
- Page 237 and 238:
Compact and chassis units Siemens A
- Page 239 and 240:
Automation & Drives Interactive cat
- Page 241:
Catalog DA 65.11 • 2003/2004 SIMO