Robust Control
Robust Control
Robust Control

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
92 CHAPTER 7. GENERAL PROBLEM.<br />
7.6. AN AGGREGATED EXAMPLE 91<br />
nv<br />
- o -<br />
6~u<br />
?<br />
Vv<br />
Wu<br />
6 P<br />
v<br />
r<br />
u<br />
+<br />
+<br />
?<br />
- Vr<br />
- Cff - - P0<br />
- -<br />
6<br />
+<br />
+<br />
nr<br />
y<br />
?<br />
Cfb<br />
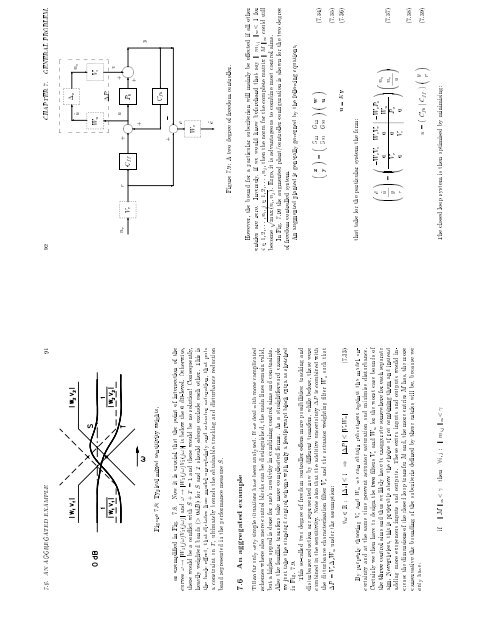
Figure 7.8: Typical mixed sensitivity weights.<br />
n ?<br />
+ ;<br />
? -<br />
?<br />
e<br />
We<br />
? ~e<br />
as exempli ed in Fig. 7.8. Now it is crucial that the point of intersection of the<br />
curves ! !jW1(j!)V1(j!)j and ! !jW2(j!)V2(j!)j is below the 0 dB-level. Otherwise,<br />
there would be a con ict with S + T = 1 and there would be no solution! Consequently,<br />
heavily weighted bands (> 0dB) for S and T should always exclude each other. This is<br />
the basic e ect, that dictates how model uncertainty and actuator saturation, that puts<br />
a constraint on T , ultimately bounds the obtainable tracking and disturbance reduction<br />
band represented in the performance measure S.<br />
Figure 7.9: Atwo degree of freedom controller.<br />
7.6 An aggregated example<br />
However, the bound for a particular subcriterion will mainly be e ected if all other<br />
entries are zero. Inversely, if we would know beforehand that say k mij k1< 1 for<br />
i 2 1 2::: nij 2 1 2::: nj, then the norm for the complete matrix k M k1 could still<br />
become p max (ninj). Ergo, it is advantageous to combine most control aims.<br />
In Fig. 7.10 the augmented plant/controller con guration is shown for the two degree<br />
of freedom controlled system.<br />
An augmented planted is generally governed by the following equations:<br />
(7.34)<br />
w<br />
u<br />
z<br />
y = G11 G12<br />
G21 G22<br />
(7.35)<br />
Till so far only very simple situations have been analysed. If we deal with more complicated<br />
schemes where also more control blocks can be distinguished, the main lines remain valid,<br />
but a higher appeal is done for one's creativity in combining control aims and constraints.<br />
Also the familiar transfers take more complicated forms. As a straightforward example<br />
we just take the standard control scheme with only a feedforward block extra as sketched<br />
in Fig. 7.9.<br />
This so-called two degree of freedom controller o ers more possibilities: tracking and<br />
disturbance reduction are represented now by di erent transfers, while before, these were<br />
combined in the sensitivity. Note also that the additive uncertainty P is combined with<br />
the disturbance characterisation lter Vv and the actuator weighting lter Wu such that<br />
P = Vv oWu under the assumption:<br />
u = Ky (7.36)<br />
8! 2R : j oj 1 ) j Pj jVvWuj (7.33)<br />
that take for the particular system the form:<br />
1<br />
A (7.37)<br />
0<br />
@ nv<br />
nr<br />
u<br />
1<br />
C<br />
A<br />
;WeVv WeVr ;WePo<br />
0 0 Wu<br />
0<br />
B<br />
@<br />
1<br />
C<br />
A =<br />
~e<br />
~u<br />
y<br />
r<br />
0<br />
B<br />
@<br />
Vv 0 Po<br />
0 Vr 0<br />
(7.38)<br />
(7.39)<br />
y<br />
r<br />
By properly choosing Vv and Wu we can obtain robustness against the model uncertainty<br />
and at the same time prevent actuator saturation and minimise disturbance.<br />
Certainly we then have to design the two lters Vv and Wu for the worst case bounds of<br />
the three control aims and thus we likely have to exaggerate somewhere for each separate<br />
aim. Nevertheless, this is preferable above the choice of not combining them and instead<br />
adding more exogenous inputs and outputs. These extra inputs and outputs would increase<br />
the dimensions of the closed loop transfer M and, the more entries M has, the more<br />
conservative the bounding of the subcriteria de ned by these entries will be, because we<br />
only have:<br />
u = ; Cfb Cff<br />
The closed loop system is then optimised by minimising:<br />
if k M k1< then 8i j : k mij k1