Proposal to Participate in RoboCup 2010 Standard Platform League ...
Proposal to Participate in RoboCup 2010 Standard Platform League ...
Proposal to Participate in RoboCup 2010 Standard Platform League ...

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
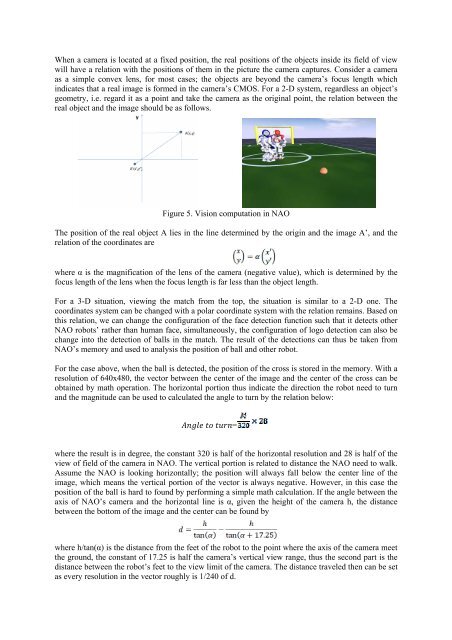
When a camera is located at a fixed position, the real positions of the objects <strong>in</strong>side its field of view<br />
will have a relation with the positions of them <strong>in</strong> the picture the camera captures. Consider a camera<br />
as a simple convex lens, for most cases; the objects are beyond the camera’s focus length which<br />
<strong>in</strong>dicates that a real image is formed <strong>in</strong> the camera’s CMOS. For a 2-D system, regardless an object’s<br />
geometry, i.e. regard it as a po<strong>in</strong>t and take the camera as the orig<strong>in</strong>al po<strong>in</strong>t, the relation between the<br />
real object and the image should be as follows.<br />
Figure 5. Vision computation <strong>in</strong> NAO<br />
The position of the real object A lies <strong>in</strong> the l<strong>in</strong>e determ<strong>in</strong>ed by the orig<strong>in</strong> and the image A’, and the<br />
relation of the coord<strong>in</strong>ates are<br />
where α is the magnification of the lens of the camera (negative value), which is determ<strong>in</strong>ed by the<br />
focus length of the lens when the focus length is far less than the object length.<br />
For a 3-D situation, view<strong>in</strong>g the match from the <strong>to</strong>p, the situation is similar <strong>to</strong> a 2-D one. The<br />
coord<strong>in</strong>ates system can be changed with a polar coord<strong>in</strong>ate system with the relation rema<strong>in</strong>s. Based on<br />
this relation, we can change the configuration of the face detection function such that it detects other<br />
NAO robots’ rather than human face, simultaneously, the configuration of logo detection can also be<br />
change <strong>in</strong><strong>to</strong> the detection of balls <strong>in</strong> the match. The result of the detections can thus be taken from<br />
NAO’s memory and used <strong>to</strong> analysis the position of ball and other robot.<br />
For the case above, when the ball is detected, the position of the cross is s<strong>to</strong>red <strong>in</strong> the memory. With a<br />
resolution of 640x480, the vec<strong>to</strong>r between the center of the image and the center of the cross can be<br />
obta<strong>in</strong>ed by math operation. The horizontal portion thus <strong>in</strong>dicate the direction the robot need <strong>to</strong> turn<br />
and the magnitude can be used <strong>to</strong> calculated the angle <strong>to</strong> turn by the relation below:<br />
=<br />
where the result is <strong>in</strong> degree, the constant 320 is half of the horizontal resolution and 28 is half of the<br />
view of field of the camera <strong>in</strong> NAO. The vertical portion is related <strong>to</strong> distance the NAO need <strong>to</strong> walk.<br />
Assume the NAO is look<strong>in</strong>g horizontally; the position will always fall below the center l<strong>in</strong>e of the<br />
image, which means the vertical portion of the vec<strong>to</strong>r is always negative. However, <strong>in</strong> this case the<br />
position of the ball is hard <strong>to</strong> found by perform<strong>in</strong>g a simple math calculation. If the angle between the<br />
axis of NAO’s camera and the horizontal l<strong>in</strong>e is α, given the height of the camera h, the distance<br />
between the bot<strong>to</strong>m of the image and the center can be found by<br />
where h/tan(α) is the distance from the feet of the robot <strong>to</strong> the po<strong>in</strong>t where the axis of the camera meet<br />
the ground, the constant of 17.25 is half the camera’s vertical view range, thus the second part is the<br />
distance between the robot’s feet <strong>to</strong> the view limit of the camera. The distance traveled then can be set<br />
as every resolution <strong>in</strong> the vec<strong>to</strong>r roughly is 1/240 of d.