

Exercise 1.pdf (solution)
Exercise 1.pdf (solution)
Exercise 1.pdf (solution)

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
• 41514 – DYNAMICS OF MACHINES IFS<br />
1 <strong>Exercise</strong> – Particle Dynamics in 3D (Recapitulation)<br />
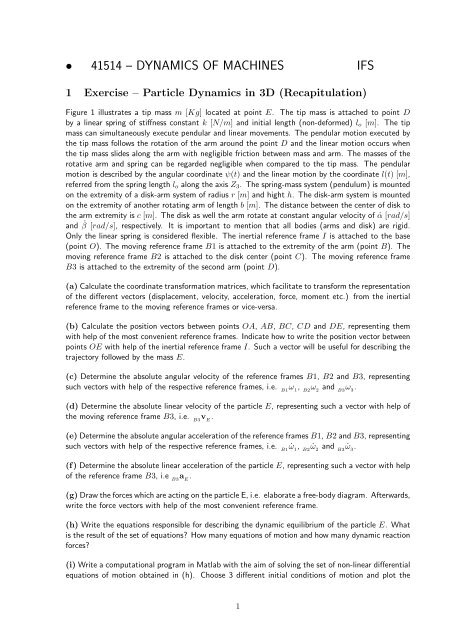
Figure 1 illustrates a tip mass m [Kg] located at point E. The tip mass is attached to point D<br />
by a linear spring of stiffness constant k [N/m] and initial length (non-deformed) lo [m]. The tip<br />
mass can simultaneously execute pendular and linear movements. The pendular motion executed by<br />
the tip mass follows the rotation of the arm around the point D and the linear motion occurs when<br />
the tip mass slides along the arm with negligible friction between mass and arm. The masses of the<br />
rotative arm and spring can be regarded negligible when compared to the tip mass. The pendular<br />
motion is described by the angular coordinate ψ(t) and the linear motion by the coordinate l(t) [m],<br />
referred from the spring length lo along the axis Z3. The spring-mass system (pendulum) is mounted<br />
on the extremity of a disk-arm system of radius r [m] and hight h. The disk-arm system is mounted<br />
on the extremity of another rotating arm of length b [m]. The distance between the center of disk to<br />
the arm extremity is c [m]. The disk as well the arm rotate at constant angular velocity of ˙α [rad/s]<br />
and ˙ β [rad/s], respectively. It is important to mention that all bodies (arms and disk) are rigid.<br />
Only the linear spring is considered flexible. The inertial reference frame I is attached to the base<br />
(point O). The moving reference frame B1 is attached to the extremity of the arm (point B). The<br />
moving reference frame B2 is attached to the disk center (point C). The moving reference frame<br />
B3 is attached to the extremity of the second arm (point D).<br />
(a)Calculatethecoordinatetransformationmatrices, whichfacilitatetotransformtherepresentation<br />
of the different vectors (displacement, velocity, acceleration, force, moment etc.) from the inertial<br />
reference frame to the moving reference frames or vice-versa.<br />
(b) Calculate the position vectors between points OA, AB, BC, CD and DE, representing them<br />
with help of the most convenient reference frames. Indicate how to write the position vector between<br />
points OE with help of the inertial reference frame I. Such a vector will be useful for describing the<br />
trajectory followed by the mass E.<br />
(c) Determine the absolute angular velocity of the reference frames B1, B2 and B3, representing<br />
such vectors with help of the respective reference frames, i.e. B1 ω 1 , B2 ω 2 and B3 ω 3 .<br />
(d) Determine the absolute linear velocity of the particle E, representing such a vector with help of<br />
the moving reference frame B3, i.e. B3 v E .<br />
(e)DeterminetheabsoluteangularaccelerationofthereferenceframesB1, B2andB3, representing<br />
such vectors with help of the respective reference frames, i.e. B1 ˙ω 1 , B2 ˙ω 2 and B3 ˙ω 3 .<br />
(f) Determine the absolute linear acceleration of the particle E, representing such a vector with help<br />
of the reference frame B3, i.e B3 a E .<br />
(g)DrawtheforceswhichareactingontheparticleE,i.e. elaborateafree-bodydiagram. Afterwards,<br />
write the force vectors with help of the most convenient reference frame.<br />
(h) Write the equations responsible for describing the dynamic equilibrium of the particle E. What<br />
is the result of the set of equations? How many equations of motion and how many dynamic reaction<br />
forces?<br />
(i) Write a computational program in Matlab with the aim of solving the set of non-linear differential<br />
equations of motion obtained in (h). Choose 3 different initial conditions of motion and plot the<br />
1
variables l(t) and ψ(t) as a function of time. Plot the trajectory of the particle for the different initial<br />
conditions. Plot the dynamic reaction force as a function of time for the 3 different initial conditions.<br />
Figure1: Spring-mass system (pendulum) attached to the rotating reference frame B3 performing<br />
three consecutive rotations.<br />
2
SOLUTION:<br />
(a) Coordinate transformation matrices.<br />
First rotation around the Z-axis of inertial reference<br />
frame.<br />
Second rotation around the Z1-axis of the moving<br />
reference frame B1.<br />
3<br />
• Coordinate transformation matrices between<br />
I and B1:<br />
⎡ ⎤<br />
cosα sinα 0<br />
Tα = ⎣ −sinα cosα 0 ⎦<br />
0 0 1<br />
B1 s = Tα · I s<br />
I s = TT α · B1 s<br />
• Coordinate transformation matrices between<br />
B1 and B2:<br />
⎡ ⎤<br />
cosβ sinβ 0<br />
Tβ = ⎣ −sinβ cosβ 0 ⎦<br />
0 0 1<br />
B2 s = Tβ · B1 s<br />
B1 s = TT β · B2 s
Third rotation around the X2-axis of the moving<br />
reference frame B2.<br />
(b) Position vectors.<br />
• position vector I r OA :<br />
IrOA = 0 0 a ⎧ ⎫<br />
⎨ 0 ⎬<br />
T<br />
= 0<br />
⎩ ⎭<br />
a<br />
• position vector B1 r AB :<br />
B1 r AB = 0 b 0 T<br />
• position vector B2 r BC :<br />
B2 r BC = 0 0 c T<br />
• position vector B2 r CD :<br />
B2 r CD = 0 r h T<br />
• position vector B3 r DE :<br />
B3 r DE = 0 0 −(l0 +l) T<br />
• Coordinate transformation matrices between<br />
B2 and B3:<br />
⎡<br />
Tψ = ⎣<br />
B3 s = Tψ · B2 s<br />
1 0 0<br />
0 cosψ sinψ<br />
0 −sinψ cosψ<br />
B2 s = TT ψ · B3 s<br />
The position vectors were written with help of the most convenient reference frames, it means using<br />
the reference frame in which their representation are the most compact one. For describing the<br />
particle trajectory is necessary to write the vector I r OE , i.e.<br />
I r OE = I r OA + I r AB + I r BC + I r CD + I r DE<br />
4<br />
⎤<br />
⎦
or<br />
I r OE = I r OA +TT α · B1 r AB +T T α · T T β · ( B2 r BC + B2 r CD )+TT α · T T β · TT ψ · B3 r DE<br />
(c) Absolute angular velocity of the moving reference frames.<br />
• Absolute angular velocity of the moving reference frame B1:<br />
B1ω1 = Tα<br />
⎡ ⎤⎧<br />
⎫<br />
cosα sinα 0 ⎨ 0 ⎬<br />
I ˙α = ⎣ −sinα cosα 0 ⎦ 0<br />
⎩ ⎭<br />
0 0 1 ˙α<br />
⇒B1 ω1 =<br />
⎧ ⎫<br />
⎨ 0 ⎬<br />
0<br />
⎩ ⎭<br />
˙α<br />
[rad/s]<br />
• Absolute angular velocity of the moving reference frame B2:<br />
B2 ω 2 = TβTα I ˙α+Tβ B1 ˙ β =<br />
⎡<br />
= ⎣<br />
B2 ω 2 =<br />
cos(α+β) sin(α+β) 0<br />
−sin(α+β) cos(α+β) 0<br />
0 0 1<br />
⎧<br />
⎨<br />
⎩<br />
0<br />
0<br />
˙α+ ˙ β<br />
⎫<br />
⎬<br />
⎭ [rad/s]<br />
⎤⎧<br />
⎨<br />
⎦<br />
⎩<br />
0<br />
0<br />
˙α<br />
⎫<br />
⎬<br />
⎭ +<br />
⎡<br />
⎣<br />
cosβ sinβ 0<br />
−sinβ cosβ 0<br />
0 0 1<br />
• Absolute angular velocity of the moving reference frame B3:<br />
B3 ω 3 = TψTβTα I ˙α+TψTβ B1 ˙ β +Tψ B2 ˙ ψ<br />
= Tψ( B2 ω 2 + B2 ˙ ψ) =<br />
⎡<br />
⎣<br />
1 0 0<br />
0 cosψ sinψ<br />
0 −sinψ cosψ<br />
(d) Absolute linear velocity of the particle E.<br />
• Absolute linear velocity of point B<br />
B1 v B = B1 ω 1 × B1 r AB<br />
⎤⎧<br />
⎨<br />
⎦<br />
⎩<br />
⎤⎧<br />
⎨<br />
⎦<br />
⎩<br />
0<br />
0<br />
˙β<br />
⎫<br />
⎬<br />
⎭<br />
˙ψ<br />
0<br />
˙α+ ˙ ⎫<br />
⎬<br />
⎭<br />
β<br />
=<br />
⎧<br />
⎨ ˙ψ<br />
(˙α+<br />
⎩<br />
˙ β)sinψ<br />
(˙α+ ˙ ⎫<br />
⎬<br />
⎭<br />
β)cosψ<br />
[rad/s]<br />
5
= <br />
<br />
<br />
i 1 j 1 k 1<br />
0 0 ˙α<br />
0 b 0<br />
<br />
<br />
<br />
<br />
<br />
=<br />
⎧<br />
⎨<br />
⎩<br />
−b˙α<br />
0<br />
0<br />
⎫<br />
⎬<br />
⎭ [rad/s]<br />
•Absolute linear velocity of point C<br />
B1 v C = B1 v B ⇒ B2 v C = Tβ B1 v B<br />
⎡<br />
= ⎣<br />
cosβ sinβ 0<br />
−sinβ cosβ 0<br />
0 0 1<br />
⎤⎧<br />
⎨<br />
⎦<br />
⎩<br />
−b˙α<br />
0<br />
0<br />
•Absolute linear velocity of point D<br />
B2vD = B2 vC + B2 ω2 × B2 rCD + B2vrel <br />
=0<br />
⎧<br />
⎨<br />
=<br />
⎩<br />
−b˙αcosβ<br />
b˙αsinβ<br />
0<br />
⎫<br />
⎬<br />
⎭ +<br />
<br />
<br />
<br />
<br />
<br />
<br />
i 2 j 2 k 2<br />
0 0 ˙α+ ˙ β<br />
0 r h<br />
•Absolute linear velocity of the particle E<br />
B3vE = B3vD + B3ω3 × B3 rDE • (I)<br />
<br />
I<br />
B3 v D = Tψ B2 v D<br />
B3 v D =<br />
• (II)<br />
⎡<br />
⎣<br />
B3 ω 3 × B3 r DE<br />
<br />
II<br />
1 0 0<br />
0 cosψ sinψ<br />
0 −sinψ cosψ<br />
⎫<br />
⎬<br />
⎭ ⇒B2 vC =<br />
⎧<br />
⎨<br />
⎩<br />
+ B3 v rel<br />
<br />
III<br />
⎤⎧<br />
⎨<br />
⎦<br />
⎩<br />
<br />
<br />
<br />
<br />
<br />
=<br />
⎧<br />
⎨<br />
⎩<br />
−b˙αcosβ<br />
b˙αsinβ<br />
0<br />
⎫<br />
⎬<br />
−b˙αcosβ −r(˙α+ ˙ β)<br />
b˙αsinβ<br />
0<br />
−b˙αcosβ −r(˙α+ ˙ β)<br />
b˙αsinβ<br />
0<br />
6<br />
⎫<br />
⎬<br />
⎭ =<br />
⎧<br />
⎨<br />
⎩<br />
⎭ [m/s]<br />
⎫<br />
⎬<br />
⎭ [m/s]<br />
−b˙αcosβ −r(˙α+ ˙ β)<br />
b˙αsinβcosψ<br />
−b˙αsinβsinψ<br />
⎫<br />
⎬<br />
⎭ [m/s]
= <br />
<br />
<br />
i 3 j 3 k 3<br />
˙ψ (˙α+ ˙ β)sinψ (˙α+ ˙ β)cosψ<br />
0 0 −(l0 +l)<br />
• (III)<br />
B1 v rel =<br />
⎧<br />
⎨<br />
⎩<br />
0<br />
0<br />
− ˙ l<br />
⎫<br />
⎬<br />
⎭<br />
• (I)+(II)+(III)<br />
B3 v E =<br />
⎧<br />
⎨<br />
⎩<br />
<br />
<br />
<br />
<br />
<br />
=<br />
⎧<br />
⎨<br />
⎩<br />
−(l0 +l)(˙α+ ˙ β)sinψ<br />
(l0 +l) ˙ ψ<br />
0<br />
−b˙αcosβ −r(˙α+ ˙ β)−(l0 +l)(˙α+ ˙ β)sinψ<br />
b˙αsinβcosψ +(l0 +l) ˙ ψ<br />
−b˙αsinβsinψ − ˙ l<br />
⎫<br />
⎬<br />
⎭ [m/s]<br />
(e) Absolute angular acceleration of the moving reference frames.<br />
• Absolute angular acceleration of the moving reference frame B1:<br />
B1 ˙ω d<br />
1 =<br />
dt ( B1ω1 )+ B1ω1 × B1 ω ⎧ ⎫<br />
⎨ 0 ⎬<br />
1 = 0<br />
⎩ ⎭<br />
=0 ¨α<br />
⇒B1 ˙ω 1 =<br />
⎧ ⎫<br />
⎨ 0 ⎬<br />
0<br />
⎩ ⎭<br />
0<br />
[rad/s2 ]<br />
• Absolute angular acceleration of the moving reference frame B2:<br />
B2 ˙ω d<br />
2 =<br />
dt ( B2ω2 )+ B2ω2 × B2 ω ⎧<br />
⎨ 0<br />
2 = 0<br />
⎩<br />
=0 ¨α+ ¨ ⎫<br />
⎬<br />
⎭<br />
β<br />
⇒B2 ˙ω 2 =<br />
⎧ ⎫<br />
⎨ 0 ⎬<br />
0<br />
⎩ ⎭<br />
0<br />
[rad/s2 ]<br />
• Absolute angular acceleration of the moving reference frame B3:<br />
B3 ˙ω 3<br />
B3 ˙ω 3 =<br />
d<br />
=<br />
dt ( B3ω3 )+ B3ω3 × B3 ω3 =<br />
<br />
=0<br />
⎧<br />
⎨<br />
⎩<br />
¨ψ<br />
(¨α+ ¨ β)sinψ +(˙α+ ˙ β) ˙ ψcosψ<br />
(¨α+ ¨ β)cosψ −(˙α+ ˙ β) ˙ ψsinψ<br />
⎫<br />
⎬<br />
⎫<br />
⎬<br />
⎭ ⇒B3 ˙ω 3 =<br />
⎧<br />
⎨ ¨ψ<br />
(˙α+<br />
⎩<br />
˙ β) ˙ ψcosψ<br />
−(˙α+ ˙ β) ˙ ⎫<br />
⎬<br />
⎭<br />
ψsinψ<br />
[rad/s2 ]<br />
It is important to point out that ¨α = ¨ β = 0! It is given in the beginning of the example, when the<br />
7<br />
⎭
problem was formulated.<br />
(f) Absolute linear acceleration of the point B.<br />
B1aB = B1aO + B1ω1 ×( B1ω1 × B1rOB )+ B1 ˙ω 1 × B1rOB +2 · B1ω1 × B1vrel <br />
<br />
=0<br />
=0<br />
B1 ω 1 ×<br />
B1 a B =<br />
<br />
<br />
<br />
<br />
<br />
<br />
⎧<br />
⎨<br />
⎩<br />
i 1 j 1 k 1<br />
0 0 ˙α<br />
0 b a<br />
0<br />
−b˙α 2<br />
0<br />
⎫<br />
⎬<br />
<br />
<br />
<br />
<br />
<br />
=<br />
<br />
<br />
<br />
<br />
<br />
<br />
⎭ [m/s2 ]<br />
i 1 j 1 k 1<br />
0 0 ˙α<br />
−b˙α 0 0<br />
(g) Absolute linear acceleration of the point C.<br />
B1 a C = B1 a B ⇒ B2 a C = Tβ B1 a B<br />
⎡<br />
= ⎣<br />
cosβ sinβ 0<br />
−sinβ cosβ 0<br />
0 0 1<br />
⎤⎧<br />
⎨<br />
⎦<br />
⎩<br />
0<br />
−b˙α 2<br />
0<br />
<br />
<br />
<br />
<br />
<br />
=<br />
⎧<br />
⎨ 0<br />
−b˙α<br />
⎩<br />
2<br />
⎫<br />
⎬<br />
⎭<br />
0<br />
⎫<br />
⎬<br />
⎭ ⇒B2 aC =<br />
⎧<br />
⎨<br />
⎩<br />
(g) Absolute linear acceleration of the particle E.<br />
−b˙α 2 sinβ<br />
−b˙α 2 cosβ<br />
0<br />
⎫<br />
⎬<br />
⎭ [m/s2 ]<br />
<br />
=0<br />
B3aE = B3aD + B3ω3 × ( B3ω3 × B3rDE ) + B3 ˙ω 3 × B3rDE + 2 · B3ω3 × B3vrel <br />
(I) (II)<br />
(III)<br />
• (I)<br />
B2aD = B2aC <br />
see item (f)<br />
<br />
(IV)<br />
+ B1 a rel<br />
<br />
=0<br />
+ B3 a rel<br />
<br />
(V)<br />
+ B2ω2 × ( B2ω2 × B2rCD ) + B2 ˙ω 2 × B2rCD +2 · B2ω2 × B2vrel <br />
(VI)<br />
8<br />
<br />
=0<br />
<br />
=0<br />
+ B2 a rel<br />
<br />
=0
• (VI)<br />
B2 ω 2 ×<br />
<br />
<br />
<br />
<br />
<br />
<br />
⇒ B2 a D =<br />
i 2 j 2 k 2<br />
0 0 (˙α+ ˙ β)<br />
0 r h<br />
⎧<br />
⎨<br />
⎩<br />
B3 a D = Tψ B2 a D =<br />
B3 a D =<br />
• (II)<br />
B3 ω 3 ×<br />
<br />
<br />
<br />
⇒ <br />
<br />
<br />
⎧<br />
⎨<br />
<br />
<br />
<br />
<br />
<br />
<br />
⎩<br />
<br />
<br />
<br />
<br />
<br />
=<br />
<br />
<br />
<br />
<br />
<br />
<br />
−b˙α 2 sinβ<br />
−b˙α 2 cosβ −r(˙α+ ˙ β) 2<br />
0<br />
⎡<br />
⎣<br />
i 2 j 2 k 2<br />
0 0 (˙α+ ˙ β)<br />
−r(˙α+ ˙ β) 0 0<br />
1 0 0<br />
0 cosψ sinψ<br />
0 −sinψ cosψ<br />
⎫<br />
⎬<br />
−b˙α 2 sinβ<br />
−(b˙α 2 cosβ +r(˙α+ ˙ β) 2 )cosψ<br />
(b˙α 2 cosβ +r(˙α+ ˙ β) 2 )sinψ<br />
i 3 j 3 k 3<br />
˙ψ (˙α+ ˙ β)sinψ (˙α+ ˙ β)cosψ<br />
0 0 −(l0 +l)<br />
⎭ [rad/s2 ]<br />
⎤⎧<br />
⎨<br />
⎦<br />
⎩<br />
⎫<br />
⎬<br />
<br />
<br />
<br />
<br />
<br />
=<br />
⎧<br />
⎨ 0<br />
−r(˙α+<br />
⎩<br />
˙ β) 2<br />
⎫<br />
⎬<br />
⎭<br />
0<br />
−b˙α 2 sinβ<br />
−b˙α 2 cosβ −r(˙α+ ˙ β) 2<br />
0<br />
⎭ [rad/s2 ]<br />
<br />
<br />
<br />
<br />
<br />
=<br />
i 3 j 3 k 3<br />
˙ψ (˙α+ ˙ β)sinψ (˙α+ ˙ β)cosψ<br />
−(l0 +l)(˙α+ ˙ β)sinψ (l0 +l) ˙ ψ 0<br />
• (III)<br />
B3 ˙ω 3 × B3 r DE =<br />
2 ·<br />
• (IV)<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
i 3 j 3 k 3<br />
¨ψ (˙α+ ˙ β) ˙ ψcosψ −(˙α+ ˙ β) ˙ ψsinψ<br />
0 0 −(l0 +l)<br />
i 3 j 3 k 3<br />
˙ψ (˙α+ ˙ β)sinψ (˙α+ ˙ β)cosψ<br />
0 0 − ˙ l<br />
<br />
<br />
<br />
<br />
<br />
=<br />
⎧<br />
⎨<br />
⎩<br />
<br />
<br />
<br />
<br />
<br />
=<br />
⎧<br />
⎨<br />
⎩<br />
<br />
<br />
<br />
<br />
<br />
=<br />
⎧<br />
⎨<br />
⎩<br />
−2 ˙ l(˙α+ ˙ β) ˙ ψsinψ<br />
2 ˙ l ˙ ψ<br />
0<br />
9<br />
⎫<br />
⎬<br />
⎭<br />
−(l0 +l) ˙ ψ(˙α+ ˙ β)cosψ<br />
−(l0 +l)(˙α+ ˙ β) 2 sinψcosψ<br />
(l0 +l)( ˙ ψ 2 +(˙α+ ˙ β) 2 sin 2 ψ)<br />
−(l0 +l)(˙α+ ˙ β) ˙ ψcosψ<br />
(l0 +l) ¨ ψ<br />
0<br />
⎫<br />
⎬<br />
⎭<br />
⎫<br />
⎬<br />
⎭<br />
⎫<br />
⎬<br />
⎭
B3<br />
B3P =<br />
• (V)<br />
B3 a rel =<br />
⎧<br />
⎨<br />
⎩<br />
0<br />
0<br />
− ¨ l<br />
⎫<br />
⎬<br />
⎭ [m/s2 ]<br />
Adding the terms determined in (I), (II), (III), (IV) and (V), one achieves the absolute linear acceleration<br />
of the particle E represented in the reference frame B3:<br />
B3 a E =<br />
⎧<br />
⎨<br />
⎩<br />
−b˙α 2 sinβ −2(l0 +l) ˙ ψ(˙α+ ˙ β)cosψ −2 ˙ l(˙α+ ˙ β)sinψ<br />
−(b˙α 2 cosβ +r(˙α+ ˙ β) 2 )cosψ −(l0 +l)(˙α+ ˙ β) 2 sinψcosψ +(l0 +l) ¨ ψ +2 ˙ l ˙ ψ<br />
(b˙α 2 cosβ +r(˙α+ ˙ β) 2 )sinψ +(l0 +l)( ˙ ψ 2 +(˙α+ ˙ β) 2 sin 2 ψ)− ¨ l<br />
(g) Free-body diagram of the particle E.<br />
⎫<br />
⎬<br />
⎭ [rad/s2 ]<br />
• Vector representation of the forces acting on the particle E :<br />
I P = 0 0 −mg T<br />
• Force in the direction of the pendulum rod<br />
B3 T = 0 0 kl T<br />
• Forces perpendicular to the pendulum rod:<br />
B3 R = −R 0 0 T<br />
(h) Dynamic equilibrium of the particle E according to the second Newton’s law:<br />
d<br />
F = TψTβTα<br />
<br />
dt (m I v E ) = TψTβTα( ˙m<br />
=0<br />
B3 F = m B3 a E = B3 R + B3 T+TψTβTα I P<br />
⎡<br />
⎣<br />
1 0 0<br />
0 cosψ sinψ<br />
0 −sinψ cosψ<br />
⎤⎡<br />
⎦⎣<br />
cosβ sinβ 0<br />
−sinβ cosβ 0<br />
0 0 1<br />
I v E +m I a E )<br />
⎤⎡<br />
⎦⎣<br />
10<br />
cosα sinα 0<br />
−sinα cosα 0<br />
0 0 1<br />
⎤⎧<br />
⎨<br />
⎦<br />
⎩<br />
0<br />
⎫<br />
⎬<br />
0<br />
⎭<br />
−mg<br />
=<br />
⎧<br />
⎨ 0<br />
⎫<br />
⎬<br />
−mgsinψ<br />
⎩ ⎭<br />
−mgcosψ
⎧<br />
⎨<br />
⎩<br />
⎧<br />
⎨<br />
m<br />
⎩<br />
−R<br />
−mgsinψ<br />
−mgcosψ +kl<br />
⎫<br />
⎬<br />
⎭ =<br />
−b˙α 2 sinβ −2(l0 +l) ˙ ψ(˙α+ ˙ β)cosψ −2 ˙ l(˙α+ ˙ β)sinψ<br />
−(b˙α 2 cosβ +r(˙α+ ˙ β) 2 )cosψ −(l0 +l)(˙α+ ˙ β) 2 sinψcosψ +(l0 +l) ¨ ψ +2 ˙ l ˙ ψ<br />
(b˙α 2 cosβ +r(˙α+ ˙ β) 2 )sinψ +(l0 +l)( ˙ ψ 2 +(˙α+ ˙ β) 2 sin 2 ψ)− ¨ l<br />
The final result of the application of the second Newton’s law is the achievement of three equations,<br />
i.e. one for calculating the dynamic reaction forces R and two additional equations responsible for<br />
describing the movement of the particle E as a function of the time, ¨ ψ(t) and ¨ l(t).<br />
• Dynamic reaction force (direction X 3 ) :<br />
R = m(b˙α 2 sinβ +2(l0 +l) ˙ ψ(˙α+ ˙ β)cosψ +2 ˙ l(˙α+ ˙ β)sinψ)<br />
• Equations of motion for the particle E (directions Y 3 and Z 3 )<br />
¨ψ = − g<br />
(l0 +l) sinψ + (b˙α2 cosβ +r(˙α+ ˙ β) 2 )<br />
(l0 +l)<br />
cosψ +(˙α+ ˙ β) 2 sinψcosψ − 2˙ l ˙ ψ<br />
(l0 +l)<br />
¨ l = − k<br />
m l+gcosψ +[b˙α2 cosβ +r(˙α+ ˙ β) 2 ]sinψ +(l0 +l)[ ˙ ψ 2 +(˙α+ ˙ β) 2 sin 2 ψ]<br />
(i) Computational routine implemented using Matlab and numerical results.<br />
clear all close all<br />
% parameters of the mechanical system<br />
a = 0.05; % [m]<br />
b = 0.5; % [m]<br />
c = 0.05; % [m]<br />
r = 0.1; % [m]<br />
h = 0.20; % [m]<br />
lo= 0.1; % [m]<br />
m = 0.2; % [kg]<br />
k = 2000; % [N/m]<br />
g = 9.82; % [m/s^2]<br />
% initial conditions<br />
alfa(1) = 0 % [rad]<br />
beta(1) = 0 % [rad]<br />
alfad = 2*pi/2 % [rad/s]<br />
betad = 2*pi*4 % [rad/s]<br />
l(1) = 0.000; % [m]<br />
ld(1) = 0; % [m/s]<br />
psi(1) = pi/6; % [rad]<br />
psid(1) = 0; % [rad/s]<br />
11<br />
⎫<br />
⎬<br />
⎭
% defining the position vectors with respect to desired reference frames<br />
Iroa = [0; 0; a];<br />
B1rab = [0; b; 0];<br />
B2rbc = [0; 0; c];<br />
B2rcd = [0; r; h];<br />
B3rde = [0; 0; -(lo+l(1))];<br />
% defining the transformation matrices<br />
Talfa = [cos(alfa(1)) sin(alfa(1)) 0<br />
-sin(alfa(1)) cos(alfa(1)) 0<br />
0 0 1];<br />
Tbeta = [cos(beta(1)) sin(beta(1)) 0<br />
-sin(beta(1)) cos(beta(1)) 0<br />
0 0 1];<br />
Tpsi = [1 0 0<br />
0 cos(psi(1)) sin(psi(1));<br />
0 -sin(psi(1)) cos(psi(1))];<br />
% creating the position vector which describes mass m’s trajectory in the inertial frame<br />
roe = Iroa + Talfa’*B1rab + Talfa’*Tbeta’*(B2rbc+B2rcd) + Talfa’*Tbeta’*Tpsi’*B3rde;<br />
rx(1)= roe(1);<br />
ry(1)= roe(2);<br />
rz(1)= roe(3);<br />
% calculating the reaction force R represented in the X3 direction<br />
Reaction(1) = m*( b*alfad^2*sin(beta(1)) ...<br />
+ 2*(lo+l(1))*psid(1)*(alfad+betad)*cos(psi(1)) ...<br />
+ 2*ld(1)*(alfad+betad)*sin(psi(1)));<br />
% numerical <strong>solution</strong><br />
% time step<br />
deltaT = 0.00005;<br />
% number of integration points<br />
n_int = 60000;<br />
for i=2:n_int,<br />
%tempo=(i-2)*deltaT<br />
t_int(i-1) = (i-2)*deltaT;<br />
% accelerations<br />
psidd(i-1) = -g/(lo+l(i-1))*sin(psi(i-1)) + ...<br />
(b*alfad^2*cos(beta(i-1))+r*(alfad+betad)^2)/(lo+l(i-1))*cos(psi(i-1)) + ...<br />
(alfad+betad)^2*sin(psi(i-1))*cos(psi(i-1)) - ...<br />
2*ld(i-1)*psid(i-1)/(lo+l(i-1));<br />
ldd(i-1) = -k/m*l(i-1) ...<br />
+ (g*cos(psi(i-1))+(b*alfad^2*cos(beta(i-1))) ...<br />
+ r*(alfad+betad)^2)*sin(psi(i-1)) ...<br />
+ (lo+l(i-1))*(psid(i-1)^2+(alfad+betad)^2*sin(psi(i-1))^2);<br />
% velocities<br />
12
end<br />
alfa(i) = alfa(i-1) + alfad*deltaT;<br />
beta(i) = beta(i-1) + betad*deltaT;<br />
psid(i) = psid(i-1) + psidd(i-1)*deltaT;<br />
ld(i) = ld(i-1) + ldd(i-1)*deltaT;<br />
% displacements<br />
psi(i) = psi(i-1) + psid(i-1)*deltaT;<br />
l(i) = l(i-1) + ld(i-1)*deltaT;<br />
% reaction force<br />
Reaction(i) = m*( b*alfad^2*sin(beta(i)) ...<br />
+ 2*(lo+l(i))*psid(i)*(alfad+betad)*cos(psi(i)) ...<br />
- 2*ld(i)*(alfad+betad)*sin(psi(i)));<br />
% transformation matrices<br />
Talfa = [ cos(alfa(i)) sin(alfa(i)) 0<br />
-sin(alfa(i)) cos(alfa(i)) 0<br />
0 0 1];<br />
Tbeta = [ cos(beta(i)) sin(beta(i)) 0<br />
-sin(beta(i)) cos(beta(i)) 0<br />
0 0 1];<br />
Tpsi = [1 0 0<br />
0 cos(psi(i)) sin(psi(i))<br />
0 -sin(psi(i)) cos(psi(i))];<br />
% defining the position vectors with respect to desired reference frames<br />
Iroa = [0; 0; a];<br />
B1rab = [0; b; 0];<br />
B2rbc = [0; 0; c];<br />
B2rcd = [0; r; h];<br />
B3rde = [0; 0; -(lo+l(i))]; % observe that only B3rde is time dependent!<br />
% creating the position vector which describes mass m’s trajectory in the inertial frame<br />
roe = Iroa + Talfa’*B1rab + Talfa’*Tbeta’*(B2rbc+B2rcd) + Talfa’*Tbeta’*Tpsi’*B3rde;<br />
rx(i)= roe(1);<br />
ry(i)= roe(2);<br />
rz(i)= roe(3);<br />
nplot=n_int-1;<br />
figure(1)<br />
plot(t_int(1:nplot),l(1:nplot))<br />
grid<br />
xlabel(’time [s]’)<br />
ylabel(’l(t) [s]’)<br />
figure(2)<br />
plot(t_int(1:nplot),psi(1:nplot))<br />
grid<br />
xlabel(’time [s]’)<br />
ylabel(’\psi(t) [s]’)<br />
figure(3)<br />
plot3(rx,ry,rz)<br />
axis([-0.8 0.8 -0.8 0.8 0 0.4])<br />
13
xlabel(’x [m]’)<br />
ylabel(’y [m]’)<br />
zlabel(’z [m]’)<br />
grid<br />
figure(4)<br />
plot(t_int(1:nplot),Reaction(1:nplot))<br />
grid<br />
xlabel(’time [s]’)<br />
ylabel(’R(t) [N]’)<br />
Figure 1 illustrates the results obtained aided by the computational routine implemented using Matlab.<br />
(a)<br />
l(t) [s]<br />
0.04<br />
0.035<br />
0.03<br />
0.025<br />
0.02<br />
0.015<br />
0.01<br />
0.005<br />
0<br />
−0.005<br />
−0.01<br />
0 0.5 1 1.5<br />
time [s]<br />
2 2.5 3<br />
(c) (d)<br />
(b)<br />
ψ(t) [s]<br />
3<br />
2.5<br />
2<br />
1.5<br />
1<br />
0.5<br />
0<br />
0 0.5 1 1.5<br />
time [s]<br />
2 2.5 3<br />
Figure 2: (a) Angle ψ(t) as function of time; (b) displacement l(t) as function of time; (c)<br />
trajectory described by the particle E when the arm and the disk rotate with a constant angular<br />
velocity given in the Matlab routine; (d) reaction force R(t) as function of time.<br />
14













