Brush Type Manual - General Dynamics Global Imaging Technologies
Brush Type Manual - General Dynamics Global Imaging Technologies
Brush Type Manual - General Dynamics Global Imaging Technologies

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
Pancake Resolvers >> <strong>Brush</strong>less Motors >><br />
<strong>Brush</strong> <strong>Type</strong> DC Motors<br />
(800) 777-3393<br />
dom from noise caused by bearing play, gear<br />
tooth resilience, and similar disturbing factors.<br />
For practical purposes, the performance-limiting<br />
residual nonlinearities, so<br />
common in conventional servomechanisms,<br />
are almost absent when DC torque motors<br />
are used.<br />
DC vs AC<br />
The direct-drive DC torque motor is probably<br />
the most linear kind of servo actuator.<br />
The common motor parameters - stall<br />
torque and no-load speed - are almost perfectly<br />
linear functions of applied voltage.The<br />
family of speed-torque characteristics is a<br />
parallel set of straight lines and doesn’t<br />
exhibit the loss in damping at low control<br />
voltages, which is characteristic of AC servo<br />
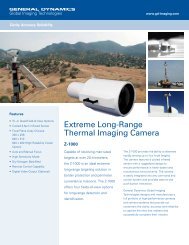
motors (see Fig. 1).<br />
For the DC torque motor, the damping is a<br />
constant. For the AC servo motor, damping<br />
varies with speed and control voltage. It is a<br />
minimum at zero speed and zero control<br />
voltage.This is critical stability region for the<br />
positioning servo systems.<br />
Performance of the DC torque motor in a<br />
servo system may be calculated very accurately<br />
using the conventional assumptions of<br />
linear servo systems.The mechanical time<br />
constants measured in milliseconds are about<br />
the same as the catalog values listed for small<br />
AC motors. However the effective time constants<br />
of small AC motors in slow speed<br />
positioning systems are 2 to 5 times catalog<br />
value; and these higher values are the determining<br />
factor in establishing system stability.<br />
On the other hand, the electrical time constants<br />
of DC torque motors are very low,<br />
down to fractions of a millisecond. In a second-order<br />
high performance system, it is<br />
electrical time constant which cuts into<br />
hase margin, thereby leading to instability.<br />
3<br />
TF<br />
Torque<br />
DC Torque<br />
Rated VoltageOperation<br />
AC Servo Motor<br />
Speed<br />
NLT<br />
Low Voltage Operation<br />
Fig. 1 Torque-speed characteristics of a DC torque<br />
motor and an AC servomotor. The slope represents<br />
inherent motor damping<br />
Because of its smooth linear characteristics,<br />
the direct-drive DC torque motor is recommended<br />
where accurate tracking over<br />
speed ranges of several thousand-to-one are<br />
required.This dynamic range is about ten<br />
times that of conventional AC servo<br />
motors.<br />
For example, torque motors are capable of<br />
speed ranges of 0.1 to 600 degrees per second<br />
with a uniformity within ±0.1%. Some<br />
units even go down to 0.001 degree per<br />
second with better than 0.5% uniformity.<br />
This performance is quite difficult to<br />
achieve with other types of drive units.<br />
DC torque motors for most applications<br />
have a space-saving “pancake” shape; i.e.<br />
they are axially thin compared with their<br />
diameter, but for some specialized applications,<br />
Axsys has designed motors that are<br />
axially long compared to the diameter.<br />
Units are usually supplied without stator<br />
housing, rotor shaft and bearings, since they<br />
are most conveniently mounted directly<br />
around the driven load.This allows flexibility<br />
in packaging, leading to a compact system<br />
assembly, and reduces the number of<br />
rotating components and linkages.<br />
www.axsys.com<br />
DC Torque Motor Characteristics<br />
>