X - Institut für Photogrammetrie
X - Institut für Photogrammetrie
X - Institut für Photogrammetrie

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
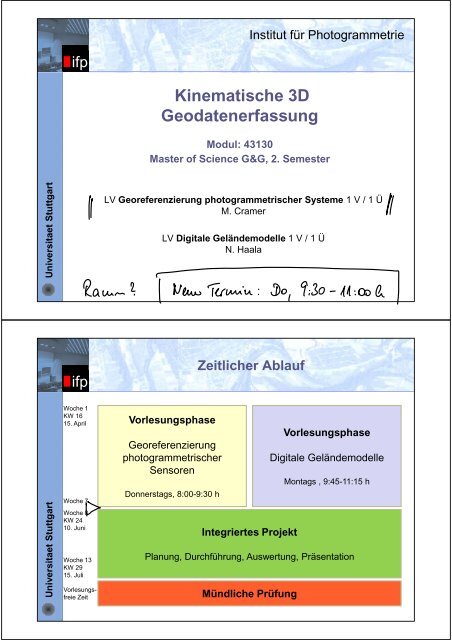
<strong>Institut</strong> <strong>für</strong> <strong>Photogrammetrie</strong><br />
ifp<br />
Kinematische 3D<br />
Geodatenerfassung<br />
Modul: 43130<br />
Master of Science G&G, 2. Semester<br />
Universitaet Stuttgart<br />
LV Georeferenzierung photogrammetrischer Systeme 1 V / 1 Ü<br />
M. Cramer<br />
LV Digitale Geländemodelle 1 V / 1 Ü<br />
N. Haala<br />
ifp<br />
Zeitlicher Ablauf<br />
Universitaet Stuttgart<br />
Woche 1<br />
KW 16<br />
15. April<br />
Woche 7<br />
Woche 8<br />
KW 24<br />
10. Juni<br />
Woche 13<br />
KW 29<br />
15. Juli<br />
Vorlesungsfreie<br />
Zeit<br />
Vorlesungsphase<br />
Georeferenzierung<br />
photogrammetrischer<br />
Sensoren<br />
Donnerstags, 8:00-9:30 h<br />
Integriertes Projekt<br />
Vorlesungsphase<br />
Digitale Geländemodelle<br />
Montags , 9:45-11:15 h<br />
Planung, Durchführung, Auswertung, Präsentation<br />
Mündliche Prüfung
ifp<br />
Püfungsleistungen<br />
Prüfungsleistung<br />
• Mündliche Prüfung, 40 Min., Gewichtung: 1.0<br />
Vorleistungen<br />
• DGM: Vorleistung (USL-V), schriftlich, mündlich<br />
• DirGeo: Vorleistung (USL-V), schriftlich, mündlich<br />
Universitaet Stuttgart<br />
<strong>Institut</strong> <strong>für</strong> <strong>Photogrammetrie</strong><br />
ifp<br />
Georeferenzierung<br />
photogrammetrischer Systeme<br />
Modul Kinematische 3D Datenerfassung, Nr. 43130<br />
Master of Science G&G, 2. Semester<br />
Universitaet Stuttgart<br />
Sommersemester 2013<br />
Michael Cramer
ifp<br />
Begriffe: Georeferenzierung (I)<br />
Universitaet Stuttgart<br />
Georeferenzierung (Standard & Normen)<br />
• [ISO 19115-2] „Process of determining the relation between the<br />
position of data in the image coordinates and its geographic or<br />
map location“<br />
• [ISO/TS 19130] „geopositioning (= determining the geographic<br />
position of an object) an object using a correspondence model<br />
derived from a set of points for which both ground and image<br />
coordinates are known.“<br />
• [en.wikipedia.org] „To georeference something means to define<br />
its existence in physical space. That is, establishing its location<br />
in terms of map projections or coordinate systems. The term is<br />
used both when establishing the relation between raster or<br />
vector images and coordinates, and when determining the<br />
spatial location of other geographical features.“<br />
ifp<br />
Begriffe: Georeferenzierung (II)<br />
Universitaet Stuttgart<br />
Georeferenzierung (GIS)<br />
• [ESRI GIS dictionary] „Aligning geographic data to a known<br />
coordinate system so it can be viewed, queried, and analyzed<br />
with other geographic data. Georeferencing may involve<br />
shifting, rotating, scaling, skewing, and in some cases warping,<br />
rubber sheeting, or orthorectifying the data.<br />
• [ESRI GIS dictionary] „In georeferencing, connections added<br />
between known points in a dataset being georeferenced and<br />
corresponding points in the dataset being used as a reference.”<br />
• [DeLorme Mapping & GIS Glossary] “The process of<br />
geographically modifying a map or aerial photograph so that<br />
every point on the map is geographically correct.”
ifp<br />
Begriffe: Georeferenzierung (III)<br />
Universitaet Stuttgart<br />
Georeferenzierung (<strong>Photogrammetrie</strong>)<br />
• [Karl Kraus <strong>Photogrammetrie</strong> Band I] „Von indirekter<br />
Georeferenzierung spricht man, wenn der Umweg über<br />
Passpunkte zur Bestimmung der Elemente der äußeren<br />
Orientierung gegangen wird. … Im Zusammenhang mit dem<br />
GPS- und IMU-Einsatz spricht man auch von direkter<br />
Georeferenzierung. GPS und IMU erlauben nämlich, den<br />
Bezug zu einem erdgebundenen Koordinatensystem, in der<br />
Regel dem Landeskoordinatensystem direkt herzustellen. …<br />
Mit den Methoden der direkten Georeferenzierung kann man<br />
die Bilder auswerten, d.h. GPS und IMU machen die<br />
Aerotriangulation (eigentlich) überflüssig“<br />
ifp<br />
Georeferenzierung von Sensoren<br />
Aufgabe<br />
Bestimmung der Beziehung zwischen der Position<br />
im Bild und der zugehörigen Position in Landeskoordinaten<br />
Universitaet Stuttgart<br />
• Indirekte Methode<br />
• rechnerische Bestimmung<br />
der äußeren Orientierung<br />
• basierend auf Passpunkten<br />
• „klassischer Ansatz“ durch<br />
(Bündel-)Blockausgleichung<br />
(parallele Orientierung<br />
Bildverband)<br />
• Direkte Methode<br />
Integrierte Sensororientierung<br />
• direkte Messung der äußeren<br />
Orientierung durch zusätzliche<br />
Sensoren<br />
• Verwendung von Positionsund<br />
Neigungsinformationen<br />
• integrierte GPS/INS-Module<br />
erlauben 3D Punktbestimmung<br />
durch VWS<br />
8
ifp<br />
Photogrammetrische Sensoren<br />
Universitaet Stuttgart<br />
• Spaceborne<br />
• Airborne<br />
• Terrestrial<br />
• Industrial<br />
• mannend<br />
• unmanned<br />
• Frame (single/multiple)<br />
• Line (single/multiple)<br />
• High accuracy<br />
• Medium accuracy<br />
• Low accuracy<br />
• Large format<br />
• Medium format<br />
• Small format<br />
• Whiskbroom • Single optic<br />
• multiple optic<br />
• geometry<br />
• radiometry
ifp<br />
Photogrammetrische Sensoren<br />
Designkonzepte<br />
Abtaster/Scanner<br />
(wiskbroom)<br />
Sensorelement<br />
Abtaster/Scanner<br />
(pushbroom)<br />
Sensorzeile<br />
Flächenkamera<br />
Single head Multi head<br />
Sensorflächen<br />
Optik<br />
drehbarer<br />
Spiegel<br />
Optik<br />
Optik<br />
Optiken<br />
Universitaet Stuttgart<br />
10<br />
ifp<br />
Anwendungen<br />
• Small format<br />
• Frame<br />
sensor<br />
• Single lens<br />
• airborne<br />
• Unmanned<br />
• Large format<br />
• Frame based<br />
• Multiple lens<br />
• airborne<br />
• manned<br />
• Large format<br />
• Line based<br />
• Multiple lens<br />
• airborne<br />
• manned<br />
Universitaet Stuttgart
ifp<br />
Georeferenzierung photogrammetrischer<br />
Systeme<br />
Universitaet Stuttgart<br />
Lehrinhalte (lt. Modulhandbuch)<br />
• Mathematische Modelle zur Orientierung von Flächen- und<br />
Zeilensensorsystemen<br />
• Integration und Anwendung von GNSS bzw. integrierte<br />
GNSS/inertial-Systeme zur direkten Bestimmung der<br />
Sensortrajektorie<br />
• Koordinatensystem & Boresight-Kalibrierung<br />
• Auswertung von Mehrkopfkamerageometrien, Plattform-<br />
Orientierung<br />
• in-situ Testfeldkalibrierungen bzw. -validierungen<br />
ifp<br />
Integriertes Projekt<br />
Flugplanung<br />
Definition Fluggebiet<br />
Aufstiegserlaubnis<br />
Planung<br />
Universitaet Stuttgart<br />
Referenzpunkte<br />
Testflug im Gebiet<br />
Kamerakalibrierung<br />
GPS-Trajektorie<br />
Georeferenzierung<br />
Produktgenerierung<br />
Flugdurchführung<br />
Auswertung
ifp<br />
Integriertes Projekt<br />
Oktokopter Befliegung & Auswertung<br />
Universitaet Stuttgart<br />
ifp<br />
Integriertes Projekt<br />
Verknüpfung mit anderen LVs<br />
LV Einführung Geodäsie &<br />
Geoinformatik<br />
BSc G&G, 1. Semester<br />
Universitaet Stuttgart<br />
LV Integriertes Praktikum<br />
BSc G&G, 6. Semester
ifp<br />
Integriertes Projekt<br />
Verknüpfung mit anderen LVs<br />
LV Navigation 1<br />
BSc G&G, 5. Semester<br />
LV Integrierte Navigation<br />
MSc G&G 2. Semester<br />
Universitaet Stuttgart<br />
LV Aerotriangulation<br />
MSc G&G, 1. Semester<br />
LV Computer Vision<br />
MSc G&G, 1. Semester<br />
ifp<br />
Integriertes Projekt<br />
Georeferenzierung<br />
Universitaet Stuttgart<br />
http://pix4d.com/
ifp<br />
Integriertes Projekt<br />
Georeferenzierung<br />
Universitaet Stuttgart<br />
http://pix4d.com/<br />
ifp<br />
Auswertung<br />
Indirekte Georeferenzierung<br />
standard geometry used in<br />
indirect georeferencing<br />
X X R p<br />
l l l Cam<br />
0 Cam<br />
c<br />
z<br />
O perspective centre<br />
c<br />
y<br />
p<br />
camera<br />
c<br />
x<br />
Universitaet Stuttgart<br />
Object coordinate<br />
system<br />
Z<br />
Y<br />
X 0<br />
X<br />
X<br />
P‘ image point<br />
( Rp)<br />
P object point<br />
19
ifp<br />
Auswertung<br />
GPS-gestützte AT<br />
Universitaet Stuttgart<br />
Modified geometry used in<br />
GPS-supported AT<br />
GPS observations used<br />
as direct observations of<br />
camera perspective centre<br />
coordinates<br />
Object coordinate<br />
system<br />
Z<br />
GPS<br />
X0<br />
Y<br />
X 0<br />
X<br />
GPS antenna phase centre<br />
X<br />
e<br />
c<br />
z<br />
O perspective centre<br />
c<br />
y<br />
p<br />
camera<br />
c<br />
x<br />
P‘ image point<br />
( Rp)<br />
P object point<br />
20<br />
ifp<br />
Auswertung<br />
Direkte Georeferenzierung<br />
Universitaet Stuttgart<br />
Modified geometry used in<br />
direct georeferencing<br />
Inertial Measurement<br />
Unit<br />
Object coordinate<br />
system<br />
Z<br />
b<br />
X0<br />
b<br />
z<br />
X b<br />
Y<br />
GPS<br />
b<br />
y<br />
X 0<br />
X<br />
b<br />
x<br />
GPS antenna phase centre<br />
Cam<br />
X b<br />
X<br />
e<br />
c<br />
z<br />
O perspective centre<br />
c<br />
y<br />
p<br />
camera<br />
c<br />
x<br />
P‘ image point<br />
( Rp)<br />
P object point<br />
21
ifp<br />
Georeferenzierung<br />
• Frame Sensor<br />
XX Rp<br />
o<br />
p ( xyz , , ) T<br />
Bildkoordinaten<br />
Universitaet Stuttgart<br />
• Pushbroom Scanner<br />
• Projektionszentrum und Rotationsmatrix sind zeitabhängig !<br />
• Wiskbroom Scanner<br />
X Xo( t)<br />
R(<br />
t)<br />
p<br />
p ( x const, y, z) T<br />
• Projektionszentrum und Rotationsmatrix sind zeitabhängig !<br />
• eine Bildkoordinate ist zeitabhängig !<br />
X X<br />
o<br />
( t)<br />
R(<br />
t)<br />
p(<br />
t)<br />
p ( x ( t),<br />
y 0, z)<br />
T<br />
Bildkoordinaten<br />
Bildkoordinaten<br />
22<br />
ifp<br />
Georeferenzierung<br />
y<br />
r 0<br />
y<br />
c<br />
CCD Zeile line<br />
r<br />
c 0<br />
x<br />
x<br />
p c<br />
Universitaet Stuttgart<br />
d c<br />
d r<br />
c<br />
Digital frame sensor<br />
p <br />
( x, yz , ) T<br />
CCD-Matrix<br />
p r<br />
Digital pushbroom sensor<br />
r<br />
p ( x const, y, z) T<br />
flight direction<br />
23
ifp<br />
Georeferenzierung<br />
Zeilenscanner<br />
t 1 t 2 t 3<br />
Universitaet Stuttgart<br />
T j T j+1<br />
backward nadir forward<br />
P i<br />
short base long base<br />
ifp<br />
Direkte Georeferenzierung<br />
Integration von GNSS/inertial Daten<br />
y b<br />
Universitaet Stuttgart<br />
V AT<br />
z b<br />
x b<br />
R E<br />
L<br />
(AT)<br />
N AT<br />
E AT<br />
R B<br />
L<br />
(AT)<br />
Z E<br />
R B<br />
L<br />
(t i )<br />
R L<br />
E<br />
(t i )<br />
Y E<br />
N t(i)<br />
V t(i)<br />
E t(i)<br />
Transformation<br />
• VON Navigationswinkel<br />
• R BL (t i ) roll, pitch,<br />
yaw<br />
• NACH <strong>Photogrammetrie</strong>winkeln<br />
• R BL (AT) <br />
• Bestimmung des<br />
Boresight Alignment<br />
• <br />
X E<br />
25