

ON OPTIMIZING NONLINEAR ADAPTIVE CONTROL ... - NTNU
ON OPTIMIZING NONLINEAR ADAPTIVE CONTROL ... - NTNU
ON OPTIMIZING NONLINEAR ADAPTIVE CONTROL ... - NTNU

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
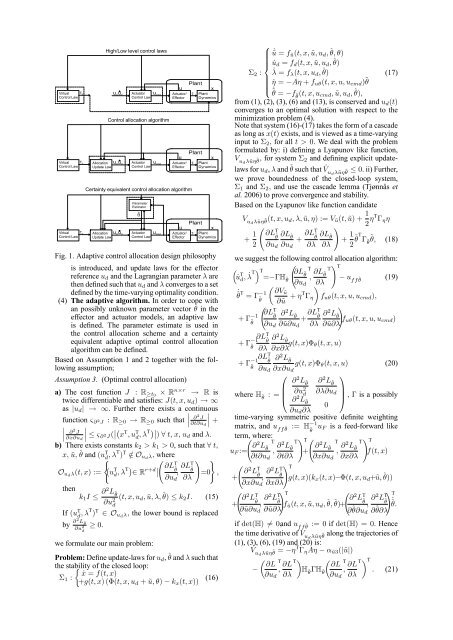
Fig. 1. Adaptive control allocation design philosophy<br />
is introduced, and update laws for the effector<br />
reference u d and the Lagrangian parameter are<br />
then dened such that u d and converges to a set<br />
dened by the time-varying optimality condition.<br />
(4) The adaptive algorithm. In order to cope with<br />
an possibly unknown parameter vector in the<br />
effector and actuator models, an adaptive law<br />
is dened. The parameter estimate is used in<br />
the control allocation scheme and a certainty<br />
equivalent adaptive optimal control allocation<br />
algorithm can be dened.<br />
Based on Assumption 1 and 2 together with the following<br />
assumption;<br />
Assumption 3. (Optimal control allocation)<br />
a) The cost function J : R t0 R nr ! R is<br />
twice differentiable and satises: J(t; x; u d ) ! 1<br />
as ju d j ! 1. Further there exists a continuous<br />
function & @2 J : R 0 ! R 0 such that @2 J <br />
@t@u d<br />
+<br />
@2 J <br />
@x@u d<br />
&@ 2 J( x T ; u T d ; T ) 8 t; x; u d and :<br />
b) There exists constants k 2 > k 1 > 0, such that 8 t;<br />
x; ~u; ^ and (u T d ; T ) T =2 O ud ; where<br />
(<br />
! )<br />
O ud (t; x) := u T d; T 2 R r+d @L<br />
<br />
T^ ; @LT^ =0 ;<br />
@u d @<br />
then<br />
k 1 I @2 L^<br />
@u 2 (t; x; u d ; ~u; ; ^) k 2 I: (15)<br />
d<br />
If (u T d ; T ) T 2 O ud ; the lower bound is replaced<br />
by @2 L^<br />
@u 2 d<br />
0.<br />
we formulate our main problem:<br />
Problem: Dene update-laws for u d , ^ and such that<br />
the stability of the closed loop:<br />
_x = f(t; x)<br />
1 :<br />
(16)<br />
+g(t; x) ((t; x; u d + ~u; ) k x (t; x))<br />
8<br />
_~u = f ~u (t; x; ~u; u d ; ^; )<br />
>< _u d = f d (t; x; ~u; u d ; ^)<br />
2 : _ = f (t; x; u d ; ^)<br />
_ = A + f u (t; x; u; u cmd )<br />
>:<br />
~ (17)<br />
<br />
_~ = f^(t; x; u cmd ; ~u; u d ; ^);<br />
from (1), (2), (3), (6) and (13), is conserved and u d (t)<br />
converges to an optimal solution with respect to the<br />
minimization problem (4).<br />
Note that system (16)-(17) takes the form of a cascade<br />
as long as x(t) exists, and is viewed as a time-varying<br />
input to 2 ; for all t > 0: We deal with the problem<br />
formulated by: i) dening a Lyapunov like function,<br />
V ud ~u ~ ; for system 2 and dening explicit updatelaws<br />
for u d , and ~ such that V _ ud ~u ~ 0: ii) Further,<br />
we prove boundedness of the closed-loop system,<br />
1 and 2 ; and use the cascade lemma (Tjønnås et<br />
al. 2006) to prove convergence and stability.<br />
Based on the Lyapunov like function candidate<br />
V ud ~u ~ (t; x; u d; ; ~u; ) := V ~u (t; ~u) + 1 2 T <br />
!<br />
+ 1 @L T^ @L^<br />
+ @LT^ @L^<br />
+ 1 2 @u d @u d @ @ 2 ~ T ~<br />
~ ; (18)<br />
we suggest the following control allocation algorithm:<br />
<br />
! _u T d; _ T T T<br />
=<br />
@L^ H^<br />
; @L^<br />
T<br />
T<br />
u<br />
@u d @<br />
ff^<br />
(19)<br />
<br />
_^ T = 1 @V~u<br />
~ @~u + T f u (t; x; u; u cmd );<br />
!<br />
@L T^ + 1 @ 2 L^<br />
+ @LT^ @ 2 L^<br />
f<br />
~<br />
u (t; x; u; u cmd )<br />
@u d @~u@u d @ @~u@<br />
@L T^ + 1 @ 2 L^<br />
~<br />
@<br />
@L T^ + 1 @ 2 L^<br />
~<br />
@x@ g(t; x) (t; x; u)<br />
g(t; x) (t; x; u) (20)<br />
@u d @x@u d<br />
0<br />
1<br />
@ 2 L^<br />
@u 2 d<br />
@ 2 L^<br />
@ 2 L^<br />
where H^<br />
: = B @@u d C<br />
@<br />
A ; is a possibly<br />
0<br />
@u d @<br />
time-varying symmetric positive denite weighting<br />
matrix, and u ff^<br />
:= H 1<br />
^ u F is a feed-forward like<br />
term, where: ! ; @2 T T<br />
!<br />
L^<br />
+ @2 T<br />
L^<br />
; @2 T T<br />
L^<br />
f(t; x)<br />
@t@ @x@u d @x@<br />
u F := @2 T<br />
L^<br />
@t@u d<br />
+ @2 L T^ ; @2 L T^<br />
@x@u d @x@<br />
+ @2 L T^<br />
@~u@u d<br />
; @2 L T^<br />
@~u@<br />
! T<br />
g(t; x)(k x (t; x) (t; x; u d +~u; ^))<br />
! T<br />
f ~u (t; x; ~u; u d ; ^; ^)+ @2 L T^<br />
!<br />
; @2 L T_^:<br />
T^<br />
@^@u d @^@<br />
if det(H) 6= 0;and u ff^<br />
:= 0 if det(H) = 0: Hence<br />
the time derivative of V ud ~u ~ along the trajectories of<br />
(1), (3), (6), (19) and (20) is:<br />
_V ud ~u ~ = T A ~u3 (j~uj)<br />
@L<br />
T<br />
; @L T @L<br />
T<br />
H^<br />
H^<br />
; @L T T : (21)<br />
@u d @ @u d @














