Mathematical Optimization in Graphics and Vision - Luiz Velho - Impa
Mathematical Optimization in Graphics and Vision - Luiz Velho - Impa
Mathematical Optimization in Graphics and Vision - Luiz Velho - Impa

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
2.7. THE PROBLEM OF POSING PROBLEMS 31<br />
3. The solution depends cont<strong>in</strong>uously on the <strong>in</strong>itial conditions.<br />
When at least one of the above conditions is not satisfied, we say that the<br />
problem is ill-posed.<br />
We have seen previously that <strong>in</strong> general <strong>in</strong>verse problems of the first <strong>and</strong> second<br />
k<strong>in</strong>d are ill-posed <strong>in</strong> the sense of Hadamard because of the non-uniqueness of the<br />
solution,<br />
The concept of ill-posed problem needs to be further <strong>in</strong>vestigated very carefully.<br />
The cont<strong>in</strong>uity condition is important because it guarantees that small variations<br />
of the <strong>in</strong>itial conditions will cause only small perturbations of the solution.<br />
Recall that, <strong>in</strong> practical problems, small variations <strong>in</strong> the <strong>in</strong>itial conditions are<br />
quite common (<strong>and</strong> sometimes, <strong>in</strong>evitable) due to measurement imprecision or<br />
numerical errors. The non-uniqueness of solutions, on the other h<strong>and</strong>, should not<br />
be necessarily an obstacle. An example will make this po<strong>in</strong>t clear.<br />
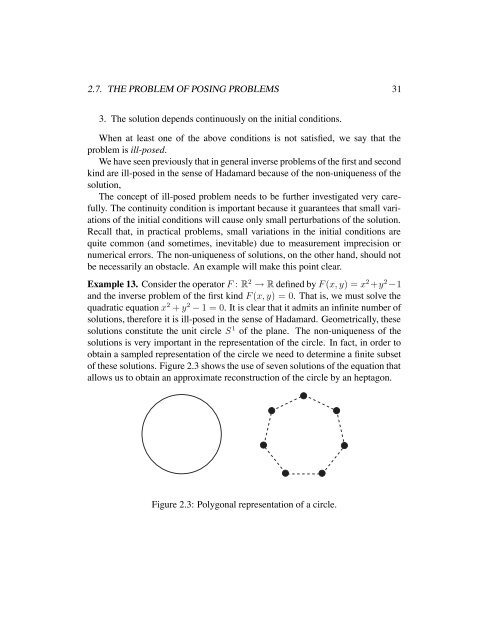
Example 13. Consider the operator F : R 2 → R def<strong>in</strong>ed by F (x, y) = x 2 +y 2 −1<br />
<strong>and</strong> the <strong>in</strong>verse problem of the first k<strong>in</strong>d F (x, y) = 0. That is, we must solve the<br />
quadratic equation x 2 + y 2 − 1 = 0. It is clear that it admits an <strong>in</strong>f<strong>in</strong>ite number of<br />
solutions, therefore it is ill-posed <strong>in</strong> the sense of Hadamard. Geometrically, these<br />
solutions constitute the unit circle S 1 of the plane. The non-uniqueness of the<br />
solutions is very important <strong>in</strong> the representation of the circle. In fact, <strong>in</strong> order to<br />
obta<strong>in</strong> a sampled representation of the circle we need to determ<strong>in</strong>e a f<strong>in</strong>ite subset<br />
of these solutions. Figure 2.3 shows the use of seven solutions of the equation that<br />
allows us to obta<strong>in</strong> an approximate reconstruction of the circle by an heptagon.<br />
Figure 2.3: Polygonal representation of a circle.