Comparison of Angle-only Filtering Algorithms in 3D using Cartesian ...
Comparison of Angle-only Filtering Algorithms in 3D using Cartesian ...
Comparison of Angle-only Filtering Algorithms in 3D using Cartesian ...

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
<strong>Comparison</strong> <strong>of</strong> <strong>Angle</strong>-<strong>only</strong> <strong>Filter<strong>in</strong>g</strong> <strong>Algorithms</strong> <strong>in</strong> <strong>3D</strong><br />
us<strong>in</strong>g <strong>Cartesian</strong> and Modified Spherical Coord<strong>in</strong>ates<br />
Mahendra Mallick 1 , Mark Morelande 2 , Lyudmila Mihaylova 3 , Sanjeev Arulampalam 4 , and Yanjun Yan 5<br />
1 Propagation Research Associates, Inc., Marietta, GA 30066, USA, mahendra.mallick@gmail.com<br />
2 The University <strong>of</strong> Melbourne, Parkville VIC 3010, Australia, m.morelande@gmail.com<br />
3 School <strong>of</strong> Comput<strong>in</strong>g and Communications, Lancaster University, United K<strong>in</strong>gdom, mila.mihaylova@lancaster.ac.uk<br />
4 Maritime Operations Division, DSTO, Ed<strong>in</strong>burgh SA 5111, Australia,<br />
sanjeev.arulampalam@dsto.defence.gov.au<br />
5 ARCON Corporation, Waltham, MA, 02452, USA, yanjun@arcon.com<br />
Abstract— We compare the performance <strong>of</strong> the extended<br />
Kalman filter (EKF), unscented Kalman filter (UKF), and particle<br />
filter (PF) for the angle-<strong>only</strong> filter<strong>in</strong>g problem <strong>in</strong> <strong>3D</strong> us<strong>in</strong>g<br />
bear<strong>in</strong>g and elevation measurements from a s<strong>in</strong>gle maneuver<strong>in</strong>g<br />
sensor. These nonl<strong>in</strong>ear filter<strong>in</strong>g algorithms use discrete-time<br />
dynamic and measurement models. Two types <strong>of</strong> coord<strong>in</strong>ate<br />
systems are considered, <strong>Cartesian</strong> coord<strong>in</strong>ates and modified<br />
spherical coord<strong>in</strong>ates (MSC) for the relative state vector. The<br />
paper presents new algorithms us<strong>in</strong>g the UKF and PF with<br />
the MSC. We also present an improved filter <strong>in</strong>itialization<br />
algorithm. Numerical results from Monte Carlo simulations<br />
show that the EKF-MSC and UKF-MSC have the best state<br />
estimation accuracy among all nonl<strong>in</strong>ear filters considered and<br />
have comparable accuracy with modest computational cost.<br />
Keywords: <strong>Angle</strong>-<strong>only</strong> filter<strong>in</strong>g <strong>in</strong> <strong>3D</strong>, Modified spherical coord<strong>in</strong>ates<br />
(MSC), Nonl<strong>in</strong>ear filter<strong>in</strong>g (NLF), Extended Kalman filter<br />
(EKF), Unscented Kalman filter (UKF), Particle filter (PF).<br />
I. INTRODUCTION<br />
The angle-<strong>only</strong> filter<strong>in</strong>g problem <strong>in</strong> <strong>3D</strong> us<strong>in</strong>g bear<strong>in</strong>g and<br />
elevation angles from a s<strong>in</strong>gle maneuver<strong>in</strong>g sensor is the<br />
counterpart <strong>of</strong> the bear<strong>in</strong>g-<strong>only</strong> filter<strong>in</strong>g problem <strong>in</strong> 2D [2],<br />
[10], [32]. This problem arises <strong>in</strong> passive rang<strong>in</strong>g us<strong>in</strong>g an<br />
<strong>in</strong>frared search and track (IRST) sensor [9], [11], passive<br />
sonar, passive radar <strong>in</strong> the presence <strong>of</strong> jamm<strong>in</strong>g [10], and<br />
satellite-to-satellite passive track<strong>in</strong>g [26], [27]. A great deal<br />
<strong>of</strong> research has been carried out for the bear<strong>in</strong>gs-<strong>only</strong> filter<strong>in</strong>g<br />
problem <strong>in</strong> 2D—see for e.g. [2], [5], [7], [10], [32] and the<br />
references there<strong>in</strong>. However, the number <strong>of</strong> publications for<br />
the angle-<strong>only</strong> filter<strong>in</strong>g problem <strong>in</strong> <strong>3D</strong> is relatively small [3],<br />
[4], [16], [25]– [29], [33], [36], [37].<br />
Early research on the bear<strong>in</strong>g-<strong>only</strong> filter<strong>in</strong>g problem <strong>in</strong> 2D<br />
used the easy-to-implement discrete-time EKF with relative<br />
<strong>Cartesian</strong> coord<strong>in</strong>ates [1]. The filter used the nearly constant<br />
velocity model (NCVM) [8] and nonl<strong>in</strong>ear measurement<br />
model for bear<strong>in</strong>g. However, this filter showed poor performance<br />
due to premature collapse <strong>of</strong> the covariance matrix.<br />
This led to the formulation <strong>of</strong> the modified polar coord<strong>in</strong>ates<br />
(MPC) [18], [22] <strong>in</strong> which improved performance <strong>of</strong> the EKF<br />
was demonstrated.<br />
The state vector <strong>in</strong> MPC consists <strong>of</strong> bear<strong>in</strong>g, bear<strong>in</strong>g-rate,<br />
range-rate divided by range, and the <strong>in</strong>verse <strong>of</strong> range [18],<br />
[2], [32]. The important difference between the MPC and the<br />
<strong>Cartesian</strong> coord<strong>in</strong>ates is that <strong>in</strong> MPC, the first three elements<br />
<strong>of</strong> the state are observable even before an ownship maneuver.<br />
Decoupl<strong>in</strong>g the observable and unobservable components <strong>of</strong><br />
the state vector prevented ill-condition<strong>in</strong>g <strong>of</strong> the covariance<br />
matrix and produced better filter performance [18], [22].<br />
The key difficulty <strong>of</strong> us<strong>in</strong>g MPC is that the dynamic model<br />
is highly nonl<strong>in</strong>ear. Aidala and Hammel [2] derived exact,<br />
closed-form discrete-time stochastic difference equations <strong>in</strong><br />
MPC us<strong>in</strong>g the nonl<strong>in</strong>ear transformations between MPC and<br />
relative <strong>Cartesian</strong> coord<strong>in</strong>ates. They proposed a discrete-time<br />
EKF <strong>in</strong> MPC [2] and showed superior performance relative to<br />
the <strong>Cartesian</strong> EKF [1].<br />
<strong>Angle</strong>-<strong>only</strong> filter<strong>in</strong>g <strong>in</strong> <strong>3D</strong> faces the same observability<br />
problem [17] that arises <strong>in</strong> the 2D case [21]. Due to the<br />
success <strong>of</strong> the MPC <strong>in</strong> the 2D case, Stallard [36] first proposed<br />
the modified spherical coord<strong>in</strong>ates (MSC) for the angle-<strong>only</strong><br />
filter<strong>in</strong>g problem <strong>in</strong> <strong>3D</strong>. Analogous to the log polar coord<strong>in</strong>ates<br />
(LPC) [12] <strong>in</strong> 2D, the log spherical coord<strong>in</strong>ates (LSC) <strong>in</strong> <strong>3D</strong><br />
were proposed <strong>in</strong> [28]. Numerical results <strong>in</strong> [28] show that the<br />
EKF-MSC and EKF-LSC perform similarly so it is sufficient<br />
to consider MSC <strong>only</strong> <strong>in</strong> this paper. The components <strong>of</strong> MSC<br />
are elevation, elevation-rate, bear<strong>in</strong>g, bear<strong>in</strong>g-rate times cos<strong>in</strong>e<br />
<strong>of</strong> elevation, range-rate divided by range, and the <strong>in</strong>verse <strong>of</strong><br />
range. As with MPC <strong>in</strong> 2D, the ma<strong>in</strong> problem with MSC is<br />
the complex nonl<strong>in</strong>ear dynamic model. Thus, calculation <strong>of</strong> the<br />
predicted state estimate and covariance <strong>in</strong> MSC is challeng<strong>in</strong>g.<br />
S<strong>in</strong>ce the bear<strong>in</strong>g and elevation are components <strong>of</strong> the MSC,<br />
the update step <strong>in</strong> MSC is straightforward [8].<br />
The discrete-time dynamic model <strong>in</strong> MSC can be derived<br />
<strong>in</strong> two different ways. Li et al [26] derived closed form<br />
analytic expressions for the discrete-time nonl<strong>in</strong>ear dynamic<br />
model <strong>in</strong> MSC us<strong>in</strong>g an approach similar to that <strong>in</strong> [2] for<br />
MPC. This model can be used to calculate the predicted state<br />
estimate <strong>in</strong> MSC. However, they do not present an algorithm<br />
for calculat<strong>in</strong>g the predicted covariance <strong>in</strong> MSC.<br />
In the second approach, the discrete-time dynamic model<br />
<strong>in</strong> MSC can be derived by a sequence <strong>of</strong> transformations.<br />
Suppose we have the MSC at time t k−1 . First, the MSC are
transformed to relative <strong>Cartesian</strong> coord<strong>in</strong>ates at time t k−1 .<br />
Then the relative <strong>Cartesian</strong> coord<strong>in</strong>ates at time t k are obta<strong>in</strong>ed<br />
by us<strong>in</strong>g the NCVM for relative <strong>Cartesian</strong> coord<strong>in</strong>ates dur<strong>in</strong>g<br />
the time <strong>in</strong>terval [t k−1 , t k ]. F<strong>in</strong>ally, the relative <strong>Cartesian</strong> coord<strong>in</strong>ates<br />
are transformed to MSC at time t k . Stallard [36] used<br />
the second approach to compute the predicted state estimate.<br />
However, calculation <strong>of</strong> the predicted covariance <strong>in</strong> [36] was<br />
based on a l<strong>in</strong>earization <strong>of</strong> the dynamic equation which operated<br />
under the assumption that the relative geometry between<br />
the target and ownship does not change significantly dur<strong>in</strong>g the<br />
<strong>in</strong>terval [t k−1 , t k ]. The underly<strong>in</strong>g <strong>Cartesian</strong> dynamic model<br />
is the S<strong>in</strong>ger model [35]. A similar method is adopted <strong>in</strong><br />
[3], [4]. In [25], the EKF is implemented us<strong>in</strong>g a discretized<br />
l<strong>in</strong>ear approximation for both the predicted state estimate and<br />
covariance. Karlsson and Gustafsson [25] implemented a PF<br />
[6], [15], [32] for MSC us<strong>in</strong>g a multistep Euler approximation.<br />
In [28], exact SDEs for MSC and LSC were derived<br />
first from the NCVM <strong>in</strong> <strong>3D</strong> for the relative <strong>Cartesian</strong> state<br />
vector. Then EKFs were implemented for MSC and LSC by<br />
numerically <strong>in</strong>tegrat<strong>in</strong>g nonl<strong>in</strong>ear differential equations for the<br />
predicted state estimate and covariance matrix jo<strong>in</strong>tly. This<br />
approach represents the cont<strong>in</strong>uous-discrete filter<strong>in</strong>g (CDF).<br />
In this paper, we calculate the predicted state estimate and<br />
covariance us<strong>in</strong>g the second approach for the exact discretetime<br />
dynamic model <strong>in</strong> MSC. Although the same dynamic<br />
model is used <strong>in</strong> [3], [4], [36], its usage <strong>in</strong> their EKF<br />
implementations does not properly account for the process<br />
noise. In particular, the approximate method used <strong>in</strong> [3], [4],<br />
[36] to calculate the predicted covariance is <strong>only</strong> valid over<br />
time <strong>in</strong>tervals for which the relative geometry between the<br />
target and ownship does not change significantly.<br />
We consider two classes <strong>of</strong> filter<strong>in</strong>g algorithms. Each class<br />
considers the relative state vector and uses a discrete-time<br />
measurement model for bear<strong>in</strong>g and elevation. The first class<br />
<strong>of</strong> algorithms uses the relative <strong>Cartesian</strong> state vector with<br />
the discrete-time NCVM <strong>in</strong> <strong>3D</strong>, and hence the measurement<br />
model is nonl<strong>in</strong>ear. The second class uses the exact discretetime<br />
dynamic model <strong>in</strong> MSC. Thus, the measurement model<br />
is l<strong>in</strong>ear. An EKF [8], [14], an UKF [23], [24], [32] and a<br />
bootstrap filter (BF) [6], [15], [32] are developed for each<br />
class. The UKF and PF algorithms us<strong>in</strong>g MSC represent new<br />
algorithms. We don’t use the assumption that the relative<br />
geometry between the target and ownship is slowly vary<strong>in</strong>g.<br />
We perform Monte Carlo simulations to compare the accuracy<br />
and computational complexity <strong>of</strong> various algorithms.<br />
The paper is organized as follows. Section II def<strong>in</strong>es the<br />
tracker and sensor coord<strong>in</strong>ate frames and describes different<br />
coord<strong>in</strong>ate systems for the target and ownship. Section III<br />
presents the dynamic models <strong>of</strong> the target and ownship,<br />
whereas the measurement models for the <strong>Cartesian</strong> relative<br />
state and MSC are presented <strong>in</strong> Section IV. An improved filter<br />
<strong>in</strong>itialization algorithm is described <strong>in</strong> Section V.<br />
Nonl<strong>in</strong>ear filter<strong>in</strong>g us<strong>in</strong>g relative <strong>Cartesian</strong> coord<strong>in</strong>ates is<br />
presented <strong>in</strong> Section VI, which describes <strong>Cartesian</strong> EKF<br />
(CEKF), <strong>Cartesian</strong> UKF (CUKF), and <strong>Cartesian</strong> BF (CBF),<br />
Section VII describes NLF us<strong>in</strong>g MSC which <strong>in</strong>cludes EKF-<br />
MSC, UKF-MSC, and BF-MSC. Numerical simulations and<br />
results are described <strong>in</strong> Section VIII and conclusions are<br />
summarized <strong>in</strong> Section IX.<br />
II. COORDINATE SYSTEMS FOR TARGET AND OWNSHIP<br />
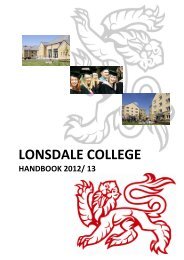
The orig<strong>in</strong> <strong>of</strong> the tracker coord<strong>in</strong>ate frame (T frame) is<br />
specified by the geodetic longitude λ 0 , geodetic latitude φ 0 ,<br />
and geodetic height h 0 . The X, Y , and Z axes <strong>of</strong> the T<br />
frame are along the local east, north, and upward directions,<br />
respectively, as shown <strong>in</strong> Figure 1. The state <strong>of</strong> the target<br />
is def<strong>in</strong>ed <strong>in</strong> the T frame. The motion <strong>of</strong> the ownship is<br />
assumed to be determ<strong>in</strong>istic and the state <strong>of</strong> the ownship<br />
is assumed to be known precisely. The ownship performs<br />
maneuvers so that the target state becomes observable. S<strong>in</strong>ce<br />
we use standard conventions for coord<strong>in</strong>ate frames and angle<br />
variables, the rotational transformation T S T from the T frame<br />
to the sensor frame (S frame) is def<strong>in</strong>ed differently <strong>in</strong> our<br />
approach compared with that <strong>in</strong> [36].<br />
Local<br />
East<br />
X T<br />
Z T<br />
Ownship<br />
x<br />
Local<br />
Up<br />
ε<br />
β<br />
Target<br />
z<br />
y<br />
Y T<br />
Local<br />
North<br />
Fig. 1. Def<strong>in</strong>ition <strong>of</strong> tracker coord<strong>in</strong>ate frame (T frame), bear<strong>in</strong>g β ∈ [0, 2π]<br />
and elevation angle ɛ ∈ [−π/2, π/2].<br />
A. <strong>Cartesian</strong> Coord<strong>in</strong>ates for State Vector and Relative State<br />
Vector<br />
The <strong>Cartesian</strong> states <strong>of</strong> the target and ownship are def<strong>in</strong>ed<br />
<strong>in</strong> the T frame, respectively, by<br />
and<br />
x t := [ x t y t z t ẋ t ẏ t ż t ] ′<br />
, (1)<br />
x o := [ x o y o z o ẋ o ẏ o ż o ] ′<br />
. (2)<br />
The relative state vector <strong>in</strong> the T frame is def<strong>in</strong>ed by<br />
x := x t − x o . (3)<br />
Let x = [x y z ẋ ẏ ż] ′ denote the relative state vector<br />
<strong>in</strong> the T frame. Then x = x t − x o , ẋ = ẋ t − ẋ o , etc. Let r T<br />
denote the range vector <strong>of</strong> the target from the ownship (or<br />
sensor) <strong>in</strong> the T frame. Then r T is def<strong>in</strong>ed by<br />
r T := [ x y z ] ′<br />
=<br />
[ x t − x o y t − y o z t − z o ] ′<br />
.<br />
(4)
The range is def<strong>in</strong>ed by<br />
r := ‖r T ‖ = √ x 2 + y 2 + z 2 , r > 0. (5)<br />
The range vector can be expressed <strong>in</strong> terms <strong>of</strong> range, bear<strong>in</strong>g<br />
(β) and elevation (ɛ), as def<strong>in</strong>ed <strong>in</strong> Figure 1, by<br />
⎡<br />
cos ɛ s<strong>in</strong> β<br />
⎤<br />
r T = r ⎣ cos ɛ cos β<br />
s<strong>in</strong> ɛ<br />
⎦ , β ∈ [0, 2π], ɛ ∈ [−π/2, π/2].<br />
(6)<br />
The ground range is def<strong>in</strong>ed by<br />
ρ := √ x 2 + y 2 = r cos ɛ, ρ > 0. (7)<br />
B. Modified Spherical Coord<strong>in</strong>ates for Relative State Vector<br />
Follow<strong>in</strong>g Stallard’s convention [36], we use ω as a component<br />
<strong>of</strong> the MSC, where<br />
ω(t) := ˙β(t) cos ɛ(t). (8)<br />
Let ζ(t) denote the logarithm <strong>of</strong> range r(t)<br />
Then<br />
ζ(t) := ln r(t). (9)<br />
r(t) = exp[ζ(t)]. (10)<br />
Differentiat<strong>in</strong>g (9) with respect to time, we get<br />
˙ζ(t) = ṙ(t)/r(t). (11)<br />
The relative state vector <strong>of</strong> the target <strong>in</strong> MSC is def<strong>in</strong>ed by<br />
[28], [36]<br />
ξ(t) := [ ξ 1 (t) ξ 2 (t) ξ 3 (t) ξ 4 (t) ξ 5 (t) ξ 6 (t) ] ′<br />
= [ ω(t) ˙ɛ(t) ˙ζ(t) β(t) ɛ(t) 1/r(t)<br />
] ′<br />
. (12)<br />
The components <strong>of</strong> the MSC def<strong>in</strong>ed <strong>in</strong> [36] and [28] are<br />
the same; however, the order<strong>in</strong>g is different.<br />
III. DYNAMIC MODELS<br />
We present discrete-time dynamic models <strong>of</strong> the target and<br />
ownship <strong>in</strong> the T frame first. Next, we present the dynamic<br />
model <strong>of</strong> the target relative to the ownship <strong>in</strong> the T frame.<br />
The target follows the NCVM <strong>in</strong> <strong>3D</strong>. The ownship follows a<br />
sequence <strong>of</strong> constant velocity (CV) and coord<strong>in</strong>ated turn (CT)<br />
models <strong>in</strong> a plane parallel to the XY plane <strong>of</strong> the T frame.<br />
A. Dynamic Model for State Vector and Relative State Vector<br />
<strong>in</strong> <strong>Cartesian</strong> Coord<strong>in</strong>ates<br />
Let x t k<br />
denote the <strong>Cartesian</strong> state <strong>of</strong> the target at time<br />
t k . Then the discrete-time dynamic model <strong>of</strong> the target is<br />
described by [8], [14]<br />
x t k = F k−1 x t k−1 + w t k−1, (13)<br />
where F k−1 and wk−1 t are the state transition matrix [8], [14]<br />
and <strong>in</strong>tegrated process noise [14], respectively, for the time<br />
<strong>in</strong>terval [t k−1 , t k ],<br />
[ ] 1 ∆k<br />
F k−1 = F(t k , t k−1 ) :=<br />
⊗ I<br />
0 1 3 , (14)<br />
w t k−1 :=<br />
∫ tk<br />
t k−1<br />
F(t k − t)w t (t) dt, (15)<br />
where ∆ k := t k − t k−1 . In (14), ⊗ refers to the Kronecker<br />
product [19]. Us<strong>in</strong>g the properties <strong>of</strong> the cont<strong>in</strong>uous-time<br />
process noise w t (t), state transition matrix F k−1 def<strong>in</strong>ed <strong>in</strong><br />
(14), and the def<strong>in</strong>ition <strong>of</strong> wk−1 t <strong>in</strong> (15), we can show that<br />
wk−1 t is a zero-mean Gaussian white <strong>in</strong>tegrated process noise<br />
with covariance Q k−1<br />
wk−1 t ∼ N(wk−1; t 0, Q k−1 ), (16)<br />
[ ∆<br />
3<br />
Q k−1 = k<br />
/3 ∆ 2 k /2 ]<br />
∆ 2 k /2 ⊗ diag(q x , q y , q z ), (17)<br />
∆ k<br />
where q x , q y , q z are the power spectral densities <strong>of</strong> the process<br />
noise [14] along the X, Y , and Z axes <strong>of</strong> the T frame,<br />
respectively.<br />
S<strong>in</strong>ce the motion <strong>of</strong> the ownship is assumed to be determ<strong>in</strong>istic,<br />
the process noise is not used for the dynamic model<br />
<strong>of</strong> the ownship. The dynamic models <strong>of</strong> the ownship for the<br />
CV and CT are described, respectively, by<br />
where<br />
x o k = F k−1 x o k−1, (18)<br />
x o k = F CT (∆ k , ω)x o k−1, (19)<br />
F CT (∆, ω) =<br />
⎡<br />
⎤<br />
1 0 0 s<strong>in</strong>(ω∆)/ω −[1 − cos(ω∆)]/ω 0<br />
0 1 0 [1 − cos(ω∆)]/ω s<strong>in</strong>(ω∆)/ω 0<br />
0 0 1 0 0 ∆<br />
⎢ 0 0 0 cos(ω∆) − s<strong>in</strong>(ω∆) 0<br />
.<br />
⎥<br />
⎣ 0 0 0 s<strong>in</strong>(ω∆) cos(ω∆) 0 ⎦<br />
0 0 0 0 0 1<br />
(20)<br />
Us<strong>in</strong>g (13) <strong>in</strong> the def<strong>in</strong>ition (3) <strong>of</strong> the relative state vector<br />
and then add<strong>in</strong>g and subtract<strong>in</strong>g F k−1 x o k−1<br />
, we get<br />
where<br />
x k = F k−1 x k−1 + w t k−1 − u k−1 , (21)<br />
u k−1 := x o k − F k−1 x o k−1. (22)<br />
We note that when ω o k approaches zero, FCT (∆ k , ω o k ) reduces<br />
to F k−1 and u k−1 becomes zero.<br />
B. Dynamic Model for Relative State Vector <strong>in</strong> Modified<br />
Spherical Coord<strong>in</strong>ates<br />
Let f MSC<br />
C : R 6 → R 6 denote the transformation from<br />
relative <strong>Cartesian</strong> coord<strong>in</strong>ates to MSC. Similarly, let f C MSC :<br />
R 6 → R 6 denote the <strong>in</strong>verse transformation from MSC to<br />
relative <strong>Cartesian</strong> coord<strong>in</strong>ates. Then,<br />
ξ k = f MSC<br />
C (x k ), (23)<br />
x k = f C MSC(ξ k ). (24)<br />
Functional forms <strong>of</strong> fC<br />
MSC (x k ) and fMSC C (ξ k) are presented <strong>in</strong><br />
[29]. Then, us<strong>in</strong>g (21) <strong>in</strong> (23), we get<br />
ξ k = f MSC<br />
C (F k−1 x k−1 + w t k−1 − u k−1 ). (25)
We have<br />
Substitution <strong>of</strong> (26) <strong>in</strong> (25) gives<br />
x k−1 = f C MSC(ξ k−1 ). (26)<br />
ξ k = f MSC<br />
C (F k−1 f C MSC(ξ k−1 ) + w t k−1 − u k−1 ). (27)<br />
Formally, we can write (27) as<br />
ξ k = b(ξ k−1 , u k−1 , w t k−1), (28)<br />
where b is a nonl<strong>in</strong>ear function <strong>of</strong> ξ k−1 , u k−1 , and wk−1 t . We<br />
note that a closed form analytic expression for the nonl<strong>in</strong>ear<br />
function b is difficult to obta<strong>in</strong>. However, it is straightforward<br />
to calculate the predicted state estimate ˆξ k|k−1 approximately<br />
given ˆξ k−1|k−1 , us<strong>in</strong>g nested functions <strong>in</strong> (27). It can be<br />
seen from (28) that the process noise wk−1<br />
t is nonl<strong>in</strong>early<br />
transformed <strong>in</strong> the MSC dynamic model. As will be seen<br />
<strong>in</strong> Section VII, this makes the EKF and UKF slightly more<br />
complicated compared to the usual dynamic models <strong>in</strong> which<br />
the process noise is additive.<br />
IV. MEASUREMENT MODELS<br />
The passive sensor collects bear<strong>in</strong>g and elevation measurements<br />
{z k } at discrete times {t k }. The measurement model for<br />
the bear<strong>in</strong>g and elevation angles us<strong>in</strong>g the relative <strong>Cartesian</strong><br />
state vector x k is<br />
where<br />
h(x k ) :=<br />
z k = h(x k ) + n k , (29)<br />
[<br />
βk<br />
]<br />
=<br />
ɛ k<br />
[ tan −1 (x k , y k )<br />
tan −1 (z k , ρ k )<br />
]<br />
, (30)<br />
where the ground range ρ k is def<strong>in</strong>ed <strong>in</strong> (7) and n k is a zeromean<br />
white Gaussian measurement noise with covariance R<br />
n k ∼ N (n k ; 0, R), R := diag(σ 2 β, σ 2 ɛ ). (31)<br />
The measurement model for the bear<strong>in</strong>g and elevation<br />
angles β k , ɛ k us<strong>in</strong>g MSC is<br />
H :=<br />
z k = Hξ k + n k , (32)<br />
[ ]<br />
0 0 0 1 0 0<br />
.<br />
0 0 0 0 1 0<br />
(33)<br />
V. FILTER INITIALIZATION<br />
We <strong>in</strong>itialize the filter us<strong>in</strong>g the first measurement z 1 at<br />
t 1 and prior <strong>in</strong>formation on range and velocity <strong>of</strong> the target.<br />
The target state at any time can be completely def<strong>in</strong>ed by<br />
the vector φ := [β, ɛ, r, s, α, γ] ′ where s is speed, α, and<br />
γ are the bear<strong>in</strong>g and elevation <strong>of</strong> target velocity. Let φ 1<br />
denote the vector φ at time t 1 . Let ¯r, ¯s, ᾱ, and ¯γ denote the<br />
prior mean for range, speed, α and γ, respectively. Similarly,<br />
let σr, 2 σs, 2 σα, 2 and σγ<br />
2 denote the prior variances for range,<br />
speed, α and γ, respectively. Then the distribution <strong>of</strong> φ 1 given<br />
the measurement z 1 and prior <strong>in</strong>formation on the range and<br />
velocity <strong>of</strong> the target is<br />
φ 1 |z 1 ∼ N(· ; ˆφ 1 , Σ 1 ), (34)<br />
where<br />
ˆφ 1 = [ z ′ 1 ¯r ¯s ᾱ ¯γ ] ′<br />
, (35)<br />
Σ 1 = diag(σ 2 β, σ 2 ɛ , σ 2 r, σ 2 s, σ 2 α, σ 2 γ). (36)<br />
The distribution (34) forms the basis for filter <strong>in</strong>itialization<br />
<strong>of</strong> the angle-<strong>only</strong> filter<strong>in</strong>g algorithms <strong>in</strong> <strong>Cartesian</strong> coord<strong>in</strong>ates<br />
and MSC.<br />
A. Initialization <strong>of</strong> Relative <strong>Cartesian</strong> Coord<strong>in</strong>ates<br />
Initialization <strong>of</strong> the EKF and UKF requires a mean and<br />
covariance matrix. Given a vector φ 1 distributed accord<strong>in</strong>g<br />
to (34) the mean and covariance matrix <strong>of</strong> the target state <strong>in</strong><br />
relative <strong>Cartesian</strong> coord<strong>in</strong>ates are<br />
∫<br />
ˆx 1 = u(φ)N(φ; ˆφ 1 , Σ 1 ) dφ, (37)<br />
∫<br />
P 1 = [u(φ) − ˆx 1 ][u(φ) − ˆx 1 ] ′ N(φ; ˆφ 1 , Σ 1 ) dφ, (38)<br />
where<br />
⎡<br />
u(φ) =<br />
⎢<br />
⎣<br />
r cos ɛ s<strong>in</strong> β<br />
r cos ɛ cos β<br />
r s<strong>in</strong> ɛ<br />
s cos γ s<strong>in</strong> α − ẋ o 1<br />
s cos γ cos α − ẏ o 1<br />
s s<strong>in</strong> γ − ż o 1<br />
⎤<br />
. (39)<br />
⎥<br />
⎦<br />
Note that most approaches to angle <strong>only</strong> filter<strong>in</strong>g, <strong>in</strong> both 2D<br />
and <strong>3D</strong>, use l<strong>in</strong>earized approximations to the <strong>in</strong>tegrals (37) and<br />
(38). Exact evaluation <strong>of</strong> the <strong>in</strong>tegrals is presented <strong>in</strong> [29].<br />
The PF is <strong>in</strong>itiated with a collection <strong>of</strong> samples which can<br />
be found as x i 1 = u(φ i ) where φ i ∼ N(· ; ˆφ 1 , Σ 1 ) for i =<br />
1, . . . , n. The sample weights are w i 1 = 1/n, i = 1, . . . , n.<br />
B. Initialization <strong>of</strong> Modified Spherical Coord<strong>in</strong>ates<br />
The first three components <strong>of</strong> the MSC are given by<br />
ξ 1 = ω = (yẋ − xẏ)/ρr, (40)<br />
ξ 2 = ˙ɛ = (żρ 2 − z(xẋ + yẏ)/ρr 2 , (41)<br />
ξ 3 = ˙ζ = (xẋ + yẏ + zż)/r 2 . (42)<br />
Us<strong>in</strong>g (4)-(7) <strong>in</strong> (40)-(42), we get<br />
⎡ ⎤<br />
⎡<br />
ξ 1<br />
⎣ ξ 2<br />
⎦ = 1 r A(β, ɛ) ⎣ ẋ<br />
ẏ<br />
ξ 3<br />
ż<br />
where<br />
⎡<br />
A(β, ɛ) := ⎣<br />
cos β − s<strong>in</strong> β 0<br />
− s<strong>in</strong> β s<strong>in</strong> ɛ − cos β s<strong>in</strong> ɛ cos ɛ<br />
s<strong>in</strong> β cos ɛ cos β cos ɛ s<strong>in</strong> ɛ<br />
⎤<br />
⎦ , (43)<br />
⎤<br />
⎦ . (44)<br />
The mean and covariance matrix <strong>of</strong> the relative target state <strong>in</strong><br />
MSC given a vector φ distributed accord<strong>in</strong>g to (34) are<br />
∫<br />
ˆξ 1 = v(φ)N(φ; ˆφ 1 , Σ 1 ) dφ, (45)<br />
∫<br />
P 1 = [v(φ) − ˆξ 1 ][v(φ) − ˆξ 1 ] ′ N(φ; ˆφ 1 , Σ 1 ) dφ, (46)
where<br />
⎡<br />
v(φ) =<br />
⎢<br />
⎣<br />
0<br />
0<br />
0<br />
β<br />
ɛ<br />
1/r<br />
⎤<br />
+ 1<br />
⎥ r<br />
⎦<br />
[ A(β, ɛ)<br />
0 3<br />
] ⎡ ⎣<br />
s cos γ s<strong>in</strong> α − ẋ o 1<br />
s cos γ cos α − ẏ o 1<br />
s s<strong>in</strong> γ − ż o 1<br />
(47)<br />
The <strong>in</strong>tegrals (45) and (46) can be evaluated over all variables<br />
except for the range r. Integration over r can be done<br />
numerically us<strong>in</strong>g, for example, Monte Carlo approximation.<br />
Due to lack <strong>of</strong> space, the expressions the components <strong>of</strong> ˆξ 1<br />
and P 1 are not presented <strong>in</strong> the paper but can be found <strong>in</strong><br />
[29].<br />
VI. NONLINEAR FILTERING USING RELATIVE CARTESIAN<br />
COORDINATES<br />
The dynamic model (NCVM <strong>in</strong> <strong>3D</strong>) is l<strong>in</strong>ear and the<br />
measurement model for bear<strong>in</strong>g and elevation is nonl<strong>in</strong>ear for<br />
this case.<br />
The widely used EKF is based on l<strong>in</strong>earized approximations<br />
to nonl<strong>in</strong>ear dynamic and/or measurement models [8], [14].<br />
For this case, the l<strong>in</strong>earized approximation is performed <strong>in</strong><br />
the measurement update step. The details <strong>of</strong> the algorithm are<br />
described <strong>in</strong> [8], [14].<br />
The UKF, like the EKF, is also an approximate filter<strong>in</strong>g<br />
algorithm. However, <strong>in</strong>stead <strong>of</strong> us<strong>in</strong>g the l<strong>in</strong>earized approximation,<br />
the UKF uses the unscented transformation (UT) to<br />
approximate the moments [23], [24]. This approach has two<br />
advantages over l<strong>in</strong>earization: it avoids the need to calculate<br />
the Jacobian and it provides a more accurate approximation.<br />
The details <strong>of</strong> the UKF algorithm are described <strong>in</strong> [23], [24]<br />
and [32].<br />
Particle filters are a class <strong>of</strong> sequential Monte Carlo methods<br />
for approximat<strong>in</strong>g the posterior density <strong>of</strong> the target state.<br />
The most common form <strong>of</strong> PF adopts a sequential importance<br />
sampl<strong>in</strong>g (SIS) [15], [6], [32] approach <strong>in</strong> which samples <strong>of</strong><br />
the target state are drawn from an importance density and<br />
weighted appropriately each time a measurement is acquired.<br />
We use a regularised bootstrap filter (BF). This <strong>in</strong>volves first<br />
draw<strong>in</strong>g samples from the prior and weight<strong>in</strong>g the samples<br />
by their likelihood [6], [15], [32]. Regularization is then<br />
performed, as suggested <strong>in</strong> [20], [30], by draw<strong>in</strong>g from a<br />
kernel density approximation us<strong>in</strong>g a Gaussian kernel with<br />
covariance matrix<br />
⎤<br />
⎦ .<br />
VII. NONLINEAR FILTERING USING MSC<br />
The dynamic model us<strong>in</strong>g MSC is nonl<strong>in</strong>ear as <strong>in</strong> (27) or<br />
(28). In addition, the process noise is not additive. S<strong>in</strong>ce,<br />
the bear<strong>in</strong>g and elevation are elements <strong>of</strong> the MSC, the<br />
measurement model (32) is l<strong>in</strong>ear.<br />
The EKF us<strong>in</strong>g MSC is described by Algorithm 1. We note<br />
that l<strong>in</strong>earization <strong>of</strong> the dynamic model is performed over<br />
both the previous state ξ k−1 and the process noise w t k−1 .<br />
As a result, the Jacobian B is a 6 × 12 matrix rather than<br />
the 6 × 6 matrix which would result if the dynamic model<br />
were nonl<strong>in</strong>ear <strong>in</strong> the previous state and l<strong>in</strong>ear <strong>in</strong> the additive<br />
process noise.<br />
A recursion <strong>of</strong> the UKF us<strong>in</strong>g MSC is given by Algorithm<br />
2. In Algorithm 2, the nonl<strong>in</strong>ear transformation is applied to a<br />
12-dimensional random variable. Therefore, 2 × 12 + 1 = 25<br />
sigma po<strong>in</strong>ts are required. The weights are selected as w 0 =<br />
κ/(12 + κ) and w i = 1/[2(12 + κ)], i = 1, . . . , 24 with κ =<br />
−3.<br />
Algorithm 3 presents a recursions <strong>of</strong> the PF us<strong>in</strong>g MSC.<br />
This PF provides state estimates <strong>in</strong> relative <strong>Cartesian</strong> coord<strong>in</strong>ates<br />
by transform<strong>in</strong>g each sample from MSC to relative<br />
<strong>Cartesian</strong> coord<strong>in</strong>ates and comput<strong>in</strong>g the weighted mean.<br />
Algorithm 1: A recursion <strong>of</strong> the EKF us<strong>in</strong>g MSC.<br />
Input: posterior mean ˆξ k−1|k−1 and covariance matrix<br />
P k−1|k−1 at time t k−1 and the measurement z k .<br />
Output: posterior mean ˆξ k|k and covariance matrix P k|k<br />
at time t k .<br />
set ˆξ 0 k|k−1 = ˆξ k−1|k−1 and P 0 k|k−1 = P k−1|k−1.<br />
compute the Jacobian B =<br />
[<br />
Dξ ′b(ξ, u k−1 , w) D w ′b(ξ, u k−1 , w) ]∣ ∣<br />
ξ=ˆξk−1|k−1 ,w=0 .<br />
compute the predicted statistics<br />
ˆξ k|k−1 = b(ˆξ 0 k|k−1, u k−1 , 0),<br />
P k|k−1 = B diag(P 0 k|k−1 , Q(∆ k))B ′ .<br />
compute the <strong>in</strong>novation covariance<br />
S k = HP k|k−1 H ′ + R.<br />
compute the ga<strong>in</strong> matrix K k = P k|k−1 H ′ S −1<br />
k .<br />
compute the posterior statistics<br />
ˆξ k|k = ˆξ k|k−1 + K k (z k − Hˆξ k|k−1 ),<br />
P k|k = P k|k−1 − K k S k K ′ k.<br />
Ω k = b(n) ˆP k−1 , (48)<br />
where b(n) is a scal<strong>in</strong>g factor and ˆP k−1 is the weighted sample<br />
covariance matrix. For samples drawn from a Gaussian distribution,<br />
the mean <strong>in</strong>tegrated squared error <strong>of</strong> the kernel density<br />
estimator is m<strong>in</strong>imized by select<strong>in</strong>g b(n) = (2n) −1/5 [34].<br />
We have found that better results are obta<strong>in</strong>ed us<strong>in</strong>g a smaller<br />
scal<strong>in</strong>g factor. In particular, we use b(n) = (2n) −1/5 /16. Such<br />
a reduction is suggested <strong>in</strong> [34] for samples from a multimodal<br />
distribution.<br />
VIII. NUMERICAL SIMULATIONS AND RESULTS<br />
The scenario used <strong>in</strong> our simulation is similar to that used<br />
<strong>in</strong> [11]. We have made some changes to make the scenario<br />
three dimensional <strong>in</strong> nature. Initial height z o 1 <strong>of</strong> the ownship<br />
is 10.0 km. Target’s <strong>in</strong>itial ground range ρ 1 , bear<strong>in</strong>g β 1 , and<br />
height z t 1 are shown <strong>in</strong> Table I. Then the <strong>in</strong>itial elevation ɛ 1<br />
can be calculated. Table I also shows target’s <strong>in</strong>itial speed s 1 ,<br />
course c 1 <strong>in</strong> the XY -plane and the Z component <strong>of</strong> velocity
Algorithm 2: A recursion <strong>of</strong> the UKF us<strong>in</strong>g MSC.<br />
Input: posterior mean ˆξ k−1|k−1 and covariance matrix<br />
P k−1|k−1 at time k − 1 and the measurement z k<br />
Output: posterior mean ˆξ k|k and covariance matrix P k|k<br />
at time k<br />
construct the matrices<br />
Σ = [ 0 6,1<br />
√<br />
(12 + κ)Pk−1|k−1 0 6,6<br />
− √ (12 + κ)P k−1|k−1 0 6,6<br />
]<br />
Ω = [ 0 6,1 0 6,6<br />
√<br />
(12 + κ)Q(∆k )<br />
0 6,6 − √ (12 + κ)Q(∆ k ) ]<br />
for b = 0, . . . , 24 do<br />
compute the sigma po<strong>in</strong>ts Ξ k,b = ˆξ k−1|k−1 + σ b ,<br />
W k,b = ω b where σ b and ω b are the (b + 1)th<br />
columns <strong>of</strong> Σ i and Ω, respectively.<br />
compute the transformed sigma po<strong>in</strong>t and covariance<br />
matrix:<br />
E k,b = b(Ξ k,b , u k−1 , W k,b )<br />
end<br />
compute the predicted statistics<br />
∑24<br />
ˆξ k|k−1 = w b E k,b<br />
b=0<br />
24<br />
∑<br />
P k|k−1 = w b (E k,b − ˆξ k|k−1 )(E k,b − ˆξ k|k−1 ) ′<br />
b=0<br />
compute the <strong>in</strong>novation covariance<br />
S k = HP k|k−1 H ′ + R.<br />
compute the ga<strong>in</strong> matrix K k = P k|k−1 H ′ S −1<br />
k .<br />
compute the corrected statistics<br />
ˆξ k|k = ˆξ k|k−1 + K k (z k − Hˆξ k|k−1 )<br />
P k|k = P k|k−1 − K k S k K ′ k.<br />
ż t 1. Target’s <strong>in</strong>itial position and velocity <strong>in</strong> <strong>Cartesian</strong> coord<strong>in</strong>ates<br />
can be found from Table I as (138/ √ 2, 138/ √ 2, 9)<br />
km and 297/ √ 2(−1, −1, 0) m/s, respectively. The motion <strong>of</strong><br />
the target is governed by the NCVM. The power spectral<br />
densities (q x , q y , q z ) <strong>of</strong> the zero-mean white acceleration process<br />
noise along the X, Y , and Z axes <strong>of</strong> the T frame are<br />
(0.01, 0.01, 0.0001) m 2 s −3 , respectively.<br />
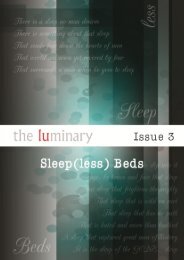
The ownship moves <strong>in</strong> a plane parallel to the XY -plane at a<br />
fixed height <strong>of</strong> 10 km with segments <strong>of</strong> CV and CT. The pr<strong>of</strong>ile<br />
<strong>of</strong> the ownship motion is presented <strong>in</strong> Table II. In Table II, ∆t<br />
represents the duration <strong>of</strong> the segment, ∆φ is the total angular<br />
change dur<strong>in</strong>g the segment, and ω o is the angular velocity <strong>of</strong><br />
the ownship dur<strong>in</strong>g the segment. The ownship trajectory and<br />
the true target trajectory from the first Monte Carlo run are<br />
shown <strong>in</strong> Figure 2.<br />
The measurement sampl<strong>in</strong>g time <strong>in</strong>terval is 1.0 s. The<br />
Algorithm 3: A recursion <strong>of</strong> the BF us<strong>in</strong>g MSC.<br />
Input: a weighted sample {wk−1 i , ξi k−1} from the<br />
posterior at time t k−1 and the measurement z k .<br />
Output: a weighted sample {wk i , ξi k} from the posterior<br />
at time t k .<br />
select <strong>in</strong>dices c(1), . . . , c(n) accord<strong>in</strong>g to the weights<br />
wk−1 1 , . . . , wn k−1 .<br />
for i = 1, . . . , n do<br />
draw wk i ∼ N(0, Q(∆ k))<br />
set ξ i k = b(ξ c(i)<br />
k−1 , u k, wk i )<br />
compute the un-normalized weight<br />
˜w<br />
k i = N(z k; Hξ i k, R)<br />
end<br />
compute the normalized weights<br />
/<br />
∑ n<br />
wk i = ˜w k<br />
i ˜w j k .<br />
j=1<br />
compute the state estimate<br />
n∑<br />
ˆx k = wkf i MSC(ξ C i k).<br />
i=1<br />
TABLE I<br />
INITIAL PARAMETERS OF TARGET.<br />
Variable Value<br />
ρ 1 (km) 138.0<br />
β 1 (deg) 45.0<br />
ɛ 1 (deg) -0.415<br />
z1 t (km) 9.0<br />
s 1 (m/s) 297.0<br />
c 1 (deg) -135.0<br />
ż1 t (m/s) 0.0<br />
bear<strong>in</strong>g and elevation measurement error standard deviations<br />
used <strong>in</strong> our simulation were 1, 15 and 35 mrad (0.057,<br />
0.857 and 2 degrees), represent<strong>in</strong>g high, medium, and low<br />
measurement accuracy, respectively. We used 1000 Monte<br />
Carlo simulations to calculate various statistics such as the<br />
root mean square (RMS) position and velocity errors.<br />
The filters are <strong>in</strong>itialized as described <strong>in</strong> Section V with the<br />
parameters shown <strong>in</strong> Table I. All PFs are implemented with a<br />
sample size <strong>of</strong> 10,000.<br />
Two measures <strong>of</strong> performance are used to compare the<br />
algorithms described <strong>in</strong> Sections VI-VII. The first is the RMS<br />
position error averaged from the end <strong>of</strong> the last observer<br />
maneuver to the end <strong>of</strong> the surveillance period. The second<br />
performance measure is the RMS position error at the end <strong>of</strong><br />
the surveillance period. The results are shown <strong>in</strong> Tables III<br />
and IV. The execution times <strong>of</strong> the algorithms are given <strong>in</strong><br />
Table V.<br />
There are several po<strong>in</strong>ts <strong>of</strong> <strong>in</strong>terest to discuss. The best<br />
performance is achieved by the EKF-MSC and UKF-MSC.<br />
The degree <strong>of</strong> their superiority over the other algorithms
TABLE II<br />
MOTION PROFILE OF OWNSHIP FOR VARIOUS SEGMENTS.<br />
Time Interval ∆t ∆φ Motion Type ω o<br />
(s) (s) (rad) (rad/s)<br />
[[0, 15] 15 0 CV 0<br />
[15, 31] 16 −π/4 CT −π/64<br />
[31, 43] 12 0 CV 0<br />
[43, 75] 32 π/2 CT π/64<br />
[75, 86] 11 0 CV 0<br />
[86, 102] 16 −π/4 CT −π/64<br />
[102, 210] 108 0 CV 0<br />
TABLE IV<br />
FINAL RMS POSITION ERROR IN METERS.<br />
Algorithm sdv (mrad) sdv (mrad) sdv (mrad)<br />
1.0 15.0 35.0<br />
CEKF 0.472 3.363 4.780<br />
CUKF 0.468 3.308 4.658<br />
CBF 0.527 4.173 5.384<br />
EKF-MSC 0.462 2.413 3.333<br />
UKF-MSC 0.462 2.533 3.499<br />
BF-MSC 1.355 3.575 5.286<br />
Y (m)<br />
10 x 104 Target and Ownship Trajectories<br />
9<br />
8<br />
7<br />
6<br />
5<br />
4<br />
3<br />
2<br />
1<br />
0<br />
Target<br />
Ownship<br />
0 2 4 6 8 10<br />
Fig. 2.<br />
X (m)<br />
Target and ownship trajectories.<br />
x 10 4<br />
depends on the the measurement accuracy. For high measurement<br />
accuracy, the EKF-MSC and UKF-MSC are <strong>only</strong><br />
marg<strong>in</strong>ally better than the EKF and UKF us<strong>in</strong>g relative<br />
<strong>Cartesian</strong> coord<strong>in</strong>ates. For low measurement accuracy, the<br />
performance improvements <strong>of</strong> the EKF-MSC and UKF-MSC<br />
are more pronounced. These performance improvements are<br />
<strong>of</strong>fset somewhat by the larger computational cost <strong>of</strong> us<strong>in</strong>g<br />
MSC compared to relative <strong>Cartesian</strong> coord<strong>in</strong>ates, as seen <strong>in</strong><br />
Table V.<br />
Although more expensive than their <strong>Cartesian</strong> counterparts,<br />
the EKF-MSC and UKF-MSC do not pose a severe computational<br />
burden. This is certa<strong>in</strong>ly true when compared to two PF<br />
algorithms. In addition to hav<strong>in</strong>g a much greater computational<br />
cost, the PFs also perform worse than the EKF-MSC and<br />
UKF-MSC, much worse <strong>in</strong> some cases. The poor performance<br />
TABLE III<br />
TIME-AVERAGED RMS POSITION ERROR IN METERS.<br />
Algorithm sdv (mrad) sdv (mrad) sdv (mrad)<br />
1.0 15.0 35.0<br />
CEKF 0.650 5.786 12.00<br />
CUKF 0.644 5.743 12.02<br />
CBF 0.694 6.183 12.09<br />
EKF-MSC 0.629 4.773 10.65<br />
UKF-MSC 0.629 4.827 10.48<br />
BF-MSC 1.310 5.689 11.71<br />
<strong>of</strong> the PFs could be improved by us<strong>in</strong>g a higher number <strong>of</strong><br />
particles, but this would obviously <strong>in</strong>crease their already large<br />
computational cost. An <strong>in</strong>terest<strong>in</strong>g aspect <strong>of</strong> the results is that<br />
the BF does not benefit from the use <strong>of</strong> MSC to the same<br />
extent as the EKF and UKF. When the measurement accuracy<br />
is high (e.g. a standard deviation <strong>of</strong> 1 mrad), the RMS position<br />
error for the CBF is about half <strong>of</strong> that for the BF-MSC. For<br />
higher measurement standard deviations (e.g. 15, 35 mrad), the<br />
BF-MSC performs slightly better than the CBF with nearly the<br />
same computational cost.<br />
TABLE V<br />
CPU TIMES OF FILTERING ALGORITHMS FOR THE MEASUREMENT<br />
STANDARD DEVIATION OF 15 MRAD.<br />
Algorithm CPU (s) Relative CPU<br />
CEKF 0.036 1.00<br />
CUKF 0.110 2.97<br />
CBF 6.280 175.22<br />
EKF-MSC 0.980 27.39<br />
UKF-MSC 0.820 22.86<br />
BF-MSC 15.600 434.90<br />
IX. CONCLUSIONS<br />
We have considered the angle-<strong>only</strong> filter<strong>in</strong>g problem <strong>in</strong><br />
<strong>3D</strong> <strong>of</strong> a non-maneuver<strong>in</strong>g target us<strong>in</strong>g bear<strong>in</strong>g and elevation<br />
measurements. The paper presents two classes <strong>of</strong> algorithms<br />
based on relative <strong>Cartesian</strong> coord<strong>in</strong>ates and modified spherical<br />
coord<strong>in</strong>ates (MSC). MSC are the <strong>3D</strong> analogue <strong>of</strong> the wellknown<br />
modified polar coord<strong>in</strong>ates (MPC) <strong>in</strong> 2D. These coord<strong>in</strong>ate<br />
systems have the important property <strong>of</strong> decoupl<strong>in</strong>g the<br />
potentially unobservable range from other observable elements<br />
<strong>of</strong> the state vector.<br />
As <strong>in</strong> the case <strong>of</strong> 2D angle-<strong>only</strong> filter<strong>in</strong>g, our results for the<br />
<strong>3D</strong> case show that us<strong>in</strong>g a coord<strong>in</strong>ate system which decouples<br />
observable and non-observable components is desirable, although<br />
the benefits <strong>of</strong> do<strong>in</strong>g this were modest <strong>in</strong> our scenario.<br />
Of the algorithms considered here, computationally efficient<br />
Gaussian approximations, such as the EKF and UKF, were<br />
the most effective. They provided accurate state estimates at a<br />
fraction <strong>of</strong> the expense <strong>of</strong> the various PF implementations.<br />
The EKF-MSC and UKF-MSC provide the best filter<strong>in</strong>g<br />
performance for the scenario considered.<br />
Our future work will consider the realistic scenario <strong>of</strong><br />
a maneuver<strong>in</strong>g target. We shall also calculate the posterior<br />
Cramér Rao lower bound (PCRLB) for the filter<strong>in</strong>g problem<br />
which represents the best achievable accuracy [13]. Then the
accuracy <strong>of</strong> various filter<strong>in</strong>g algorithms can be compared with<br />
the PCRLB.<br />
ACKNOWLEDGMENT<br />
The authors thank Sam Blackman for provid<strong>in</strong>g the details<br />
<strong>of</strong> the track<strong>in</strong>g scenario and useful discussions and advice. The<br />
authors also thank Anand Mallick for verify<strong>in</strong>g the derivations<br />
us<strong>in</strong>g Mathematica, develop<strong>in</strong>g Matlab code, and generat<strong>in</strong>g<br />
numerical results.<br />
REFERENCES<br />
[1] V. J. Aidala, Kalman filter behavior <strong>in</strong> bear<strong>in</strong>g-<strong>only</strong> track<strong>in</strong>g applications,<br />
IEEE Trans. on Aerospace and Electronic Systems, Vol. AES-15, No. 1,<br />
pp:29–39, January 1979.<br />
[2] V. J. Aidala and S. E. Hammel, Utilization <strong>of</strong> modified polar coord<strong>in</strong>ates<br />
for bear<strong>in</strong>gs-<strong>only</strong> track<strong>in</strong>g, IEEE Transactions on Automatic Control,<br />
28(3):283–294, 1983.<br />
[3] R. R. Allen and S. S. Blackman, Implementation <strong>of</strong> an angle-<strong>only</strong> track<strong>in</strong>g<br />
filter, Proc. <strong>of</strong> SPIE, Signal and Data Process<strong>in</strong>g <strong>of</strong> Small Targets, Vol.<br />
1481, Orlando, FL, USA, April 1991.<br />
[4] R. R. Allen and S. S. Blackman, <strong>Angle</strong>-<strong>only</strong> track<strong>in</strong>g with a MSC filter,<br />
Proc. <strong>of</strong> Digital Avionics Systems Conference, pp. 561 – 566, 1991.<br />
[5] S. Arulampalam and B. Ristic, <strong>Comparison</strong> <strong>of</strong> the Particle Filter with<br />
Range-Parameterised and Modified Polar EKFs for <strong>Angle</strong>-Only Track<strong>in</strong>g,<br />
Proc. <strong>of</strong> SPIE, Vol. 4048, 2000.<br />
[6] M. Arulampalam, S. Maskell, N. Gordon and T. Clapp, A Tutorial on<br />
Particle Filters for Onl<strong>in</strong>e Nonl<strong>in</strong>ear/Non-Gaussian Bayesian Track<strong>in</strong>g,<br />
IEEE Trans. on Signal Process<strong>in</strong>g, Vol. SP-50, No. 2, pp. 174–188,<br />
February 2002<br />
[7] S. Arulampalam, M. Clark, and R. V<strong>in</strong>ter, Performance <strong>of</strong> the Shifted<br />
Rayleigh Filter <strong>in</strong> S<strong>in</strong>gle-sensor Bear<strong>in</strong>gs-<strong>only</strong> Track<strong>in</strong>g, Proc. <strong>of</strong> the<br />
Tenth International Conf. on Information Fusion, Québec, Canada, July<br />
2007.<br />
[8] Y. Bar-Shalom, X. R. Li, and T. Kirubarajan, Estimation with Applications<br />
to Track<strong>in</strong>g and Navigation, John Wiley & Sons, 2001.<br />
[9] S. S. Blackman and S. H. Roszkowski, Application <strong>of</strong> IMM <strong>Filter<strong>in</strong>g</strong> to<br />
Passive Rang<strong>in</strong>g, In Proc. <strong>of</strong> SPIE, 3809:270–281, 1999.<br />
[10] S. Blackman and R. Popoli, Design and Analysis <strong>of</strong> Modern Track<strong>in</strong>g<br />
Systems, Artech House, 1999.<br />
[11] S. S. Blackman, T. White, B. Blyth, and C. Durand, Integration <strong>of</strong> Passive<br />
Rang<strong>in</strong>g with Multiple Hypothesis Track<strong>in</strong>g (MHT) for Application<br />
with <strong>Angle</strong>-Only Measurements, Proc. <strong>of</strong> SPIE, Vol. 7698, pp. 769815-1<br />
– 769815-11, 2010.<br />
[12] T. Bréhard and J-P. Le Cadre, Closed-form Posterior Cramér-Rao Bound<br />
for a Manoeuvr<strong>in</strong>g Target <strong>in</strong> the Bear<strong>in</strong>gs Only Track<strong>in</strong>g Context Us<strong>in</strong>g<br />
Best-Fitt<strong>in</strong>g Gaussian Distribution, Proc. <strong>of</strong> the N<strong>in</strong>th International Conf.<br />
on Information Fusion, Florence, Italy, July 2006.<br />
[13] T. Bréhard and J-P. Le Cadre, Closed-form posterior Cramér-Rao bounds<br />
for bear<strong>in</strong>gs <strong>only</strong> track<strong>in</strong>g, IEEE Trans. on Aerospace and Electronic<br />
Systems, Vol. AES-42, No. 4, pp. 1198–1223, October 2006.<br />
[14] A. Gelb, editor, Applied Optimal Estimation, MIT Press, 1974.<br />
[15] N. J. Gordon, D. J. Salmond, and A. F. M. Smith, Novel approach<br />
to nonl<strong>in</strong>ear/non-Gaussian Bayesian state estimation, IEE Proceed<strong>in</strong>gs-F,<br />
Vol. 140, No. 2, pp. 107–113, April 1993.<br />
[16] P. Gurfil and N. J. Kasd<strong>in</strong>, Two-step optimal estimator for three<br />
dimensional target track<strong>in</strong>g, IEEE Trans. on Aerospace and Electronic<br />
Systems, Vol. AES-40, No. 3, pp. 780 –793, July 2005.<br />
[17] S. E. Hammel and V. J. Aidala, Observability Requirements for<br />
Three-Dimensional Track<strong>in</strong>g via <strong>Angle</strong> Measurements, IEEE Trans. on<br />
Aerospace and Electronic Systems, Vol. AES-24, No. 2, pp. 200 –207,<br />
March 1985.<br />
[18] H. D. Hoelzer, G. W.Johnson, and A. O.Cohen, Modified Polar<br />
Coord<strong>in</strong>ates - The Key to Well Behaved Bear<strong>in</strong>gs Only Rang<strong>in</strong>g, In IR<br />
& D Report 78-M19-OOOlA, IBM Federal Systems Division, Shipboard<br />
and Defense Systems, Manassas, VA 22110, August 31, 1978.<br />
[19] R. A. Horn and C. R.Johnson, Topics <strong>in</strong> Matrix Analysis, Cambridge<br />
University Press, 1991.<br />
[20] M. Hürzeler and H. R. Künsch, Monte carlo approximations for general<br />
state-space models, Journal <strong>of</strong> Computational and Graphical Statistics,<br />
Vol. 7, No. 2, pp. 175–193, 1998.<br />
[21] C. Jauffret and D. Pillon Observability <strong>in</strong> passive target motion analysis,<br />
IEEE Trans. on Aerospace and Electronic Systems, Vol. AES-32, No. 4,<br />
pp. 1290–1300, October 1996.<br />
[22] G. W. Johnson, H. D. Hoelzer, A. O. Cohen, and E. F. Harrold, Improved<br />
coord<strong>in</strong>ates for target track<strong>in</strong>g from time delay <strong>in</strong>formation, Proc. <strong>of</strong> the<br />
Time Delay Estimation and Applications Conference, Naval Postgraduate<br />
School, Monterey, CA, May 1979. vol. 2. pp. M1–M32.<br />
[23] S. Julier, J. Uhlmann and H.F. Durrant-Whyte, A new method for<br />
the nonl<strong>in</strong>ear transformation <strong>of</strong> means and covariances <strong>in</strong> filters and<br />
estimators, IEEE Trans. on Automatic Control, Vol. AC-45, No. 3, pp.<br />
477–482, March 2000.<br />
[24] S. J. Julier and J. K. Uhlmann, Unscented filter<strong>in</strong>g and nonl<strong>in</strong>ear<br />
estimation, Proc. <strong>of</strong> the IEEE, Vol. 92, No. 3, pp. 401–422, March 2004.<br />
[25] R. Karlsson and F. Gustafsson, Range estimation us<strong>in</strong>g angle-<strong>only</strong> target<br />
track<strong>in</strong>g with particle filters, Proc. American Control Conference, pp.<br />
3743 – 3748, 2001.<br />
[26] Q. Li, F. Guo, Y. Zhou, and W. Jiang, Observability <strong>of</strong> Satellite<br />
to Satellite Passive Track<strong>in</strong>g from <strong>Angle</strong>s Measurements, Proc. IEEE<br />
International Conference on Control and Automation, pp. 1926 – 1931,<br />
2007.<br />
[27] Q. Li, L. Shi, H. Wang, and F. Guo, Utilization <strong>of</strong> Modified Spherical<br />
Coord<strong>in</strong>ates for Satellite to Satellite Bear<strong>in</strong>gs-Only Track<strong>in</strong>g, Ch<strong>in</strong>. J.<br />
Space Sci., Vol. 29, No. 6, pp. 627–634, 2009.<br />
[28] M. Mallick, L. Mihaylova, S. Arulampalam, and Y. Yan, <strong>Angle</strong>-<strong>only</strong><br />
<strong>Filter<strong>in</strong>g</strong> <strong>in</strong> <strong>3D</strong> Us<strong>in</strong>g Modified Spherical and Log Spherical Coord<strong>in</strong>ates,<br />
In 2011 International Conference on Information Fusion, Chicago, USA,<br />
July 5-8, 2011.<br />
[29] M. Mallick, M. Morelande, L. Mihaylova, S. Arulampalam, and Y.<br />
Yan, <strong>Angle</strong>-<strong>only</strong> <strong>Filter<strong>in</strong>g</strong> <strong>in</strong> <strong>3D</strong>, Chapter 1, In Integrated Track<strong>in</strong>g,<br />
Classification, and Sensor Management: Theory and Applications, M.<br />
Mallick, V. Krishnamurthy, and B-N Vo, Ed., Wiley-IEEE, 2012 (to be<br />
published).<br />
[30] C. Musso, N. Ouddjane, and F. Le Gland, Improv<strong>in</strong>g Regularised<br />
Particle Filters, Chapter 12, <strong>in</strong> Sequential Monte Carlo Methods <strong>in</strong><br />
Practice, (Ed.) A. Doucet, N. De Freitas, N. Gordon, Spr<strong>in</strong>ger, pp. 247-<br />
271, 2001.<br />
[31] M. K. Pitt and N. Shephard, <strong>Filter<strong>in</strong>g</strong> via Simulation:Auxiliary particle<br />
filters, Journal <strong>of</strong> the American Statistical Association, Vol. 94, No. 446,<br />
pp. 590–599, 1999.<br />
[32] B. Ristic, S. Arulampalam, and N. Gordon, Beyond the Kalman Filter,<br />
Artech House, 2004.<br />
[33] P. N. Rob<strong>in</strong>son, Modified spherical coord<strong>in</strong>ates for radar, Proc. <strong>of</strong> the<br />
AIAA Guidance, Navigation and Control Conference, Scottsdale, AZ, pp.<br />
55–64, Aug. 1-3, 1994.<br />
[34] B. W. Silverman, Density Estimation for Statistics and Data Analysis,<br />
Chapman and Hall, 1986.<br />
[35] R. A. S<strong>in</strong>ger, Estimat<strong>in</strong>g Optimal Track<strong>in</strong>g Filter Performance for<br />
Manned Maneuver<strong>in</strong>g Targets, IEEE Trans. on Aerospace and Electronic<br />
Systems, Vol. AES-6, pp: 473–483, July 1970.<br />
[36] D. V. Stallard, An angle-<strong>only</strong> track<strong>in</strong>g filter <strong>in</strong> modified spherical<br />
coord<strong>in</strong>ates, Proc. <strong>of</strong> the AIAA Guidance, Navigation and Control<br />
Conference, Monterey, CA, pp. 542–550, Aug. 17-19, 1987.<br />
[37] D. V. Stallard, <strong>Angle</strong>-<strong>only</strong> track<strong>in</strong>g filter <strong>in</strong> modified spherical coord<strong>in</strong>ates,<br />
Journal <strong>of</strong> Guidance, Control, and Dynamics, Vol. 14, No. 3, pp.<br />
694–696, 1991.