LAC-45 four axis controller manual
LAC-45 four axis controller manual
LAC-45 four axis controller manual

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
SMAC<br />
<strong>LAC</strong>-<strong>45</strong> Technical Reference Manual<br />
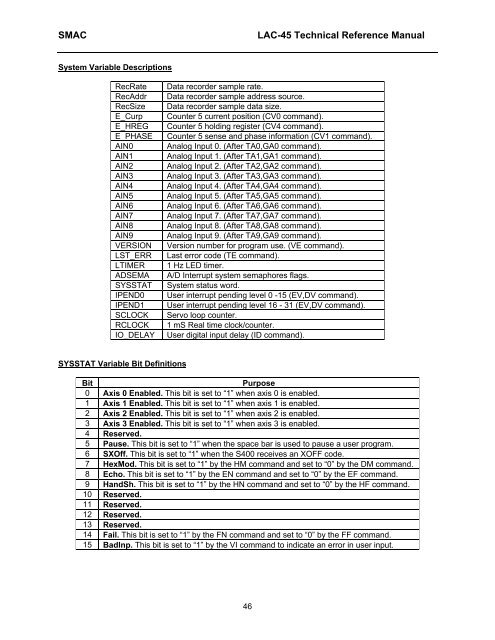
System Variable Descriptions<br />
RecRate<br />
RecAddr<br />
RecSize<br />
E_Curp<br />
E_HREG<br />
E_PHASE<br />
AIN0<br />
AIN1<br />
AIN2<br />
AIN3<br />
AIN4<br />
AIN5<br />
AIN6<br />
AIN7<br />
AIN8<br />
AIN9<br />
VERSION<br />
LST_ERR<br />
LTIMER<br />
ADSEMA<br />
SYSSTAT<br />
IPEND0<br />
IPEND1<br />
SCLOCK<br />
RCLOCK<br />
IO_DELAY<br />
Data recorder sample rate.<br />
Data recorder sample address source.<br />
Data recorder sample data size.<br />
Counter 5 current position (CV0 command).<br />
Counter 5 holding register (CV4 command).<br />
Counter 5 sense and phase information (CV1 command).<br />
Analog Input 0. (After TA0,GA0 command).<br />
Analog Input 1. (After TA1,GA1 command).<br />
Analog Input 2. (After TA2,GA2 command).<br />
Analog Input 3. (After TA3,GA3 command).<br />
Analog Input 4. (After TA4,GA4 command).<br />
Analog Input 5. (After TA5,GA5 command).<br />
Analog Input 6. (After TA6,GA6 command).<br />
Analog Input 7. (After TA7,GA7 command).<br />
Analog Input 8. (After TA8,GA8 command).<br />
Analog Input 9. (After TA9,GA9 command).<br />
Version number for program use. (VE command).<br />
Last error code (TE command).<br />
1 Hz LED timer.<br />
A/D Interrupt system semaphores flags.<br />
System status word.<br />
User interrupt pending level 0 -15 (EV,DV command).<br />
User interrupt pending level 16 - 31 (EV,DV command).<br />
Servo loop counter.<br />
1 mS Real time clock/counter.<br />
User digital input delay (ID command).<br />
SYSSTAT Variable Bit Definitions<br />
Bit<br />
Purpose<br />
0 Axis 0 Enabled. This bit is set to “1” when <strong>axis</strong> 0 is enabled.<br />
1 Axis 1 Enabled. This bit is set to “1” when <strong>axis</strong> 1 is enabled.<br />
2 Axis 2 Enabled. This bit is set to “1” when <strong>axis</strong> 2 is enabled.<br />
3 Axis 3 Enabled. This bit is set to “1” when <strong>axis</strong> 3 is enabled.<br />
4 Reserved.<br />
5 Pause. This bit is set to “1” when the space bar is used to pause a user program.<br />
6 SXOff. This bit is set to “1” when the S400 receives an XOFF code.<br />
7 HexMod. This bit is set to “1” by the HM command and set to “0” by the DM command.<br />
8 Echo. This bit is set to “1” by the EN command and set to “0” by the EF command.<br />
9 HandSh. This bit is set to “1” by the HN command and set to “0” by the HF command.<br />
10 Reserved.<br />
11 Reserved.<br />
12 Reserved.<br />
13 Reserved.<br />
14 Fail. This bit is set to “1” by the FN command and set to “0” by the FF command.<br />
15 BadInp. This bit is set to “1” by the VI command to indicate an error in user input.<br />
46