ENC Prog 11-14 - Royal Institute of Navigation
ENC Prog 11-14 - Royal Institute of Navigation
ENC Prog 11-14 - Royal Institute of Navigation

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
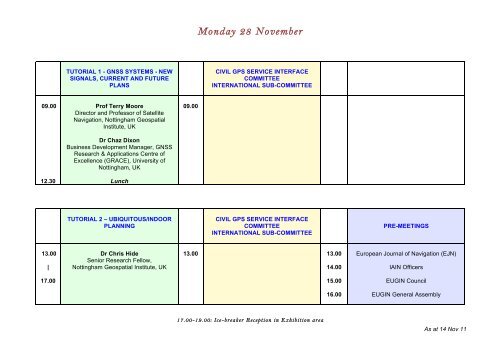
Monday 28 November<br />
TUTORIAL 1 - GNSS SYSTEMS - NEW<br />
SIGNALS, CURRENT AND FUTURE<br />
PLANS<br />
CIVIL GPS SERVICE INTERFACE<br />
COMMITTEE<br />
INTERNATIONAL SUB-COMMITTEE<br />
09.00<br />
12.30<br />
Pr<strong>of</strong> Terry Moore<br />
Director and Pr<strong>of</strong>essor <strong>of</strong> Satellite<br />
<strong>Navigation</strong>, Nottingham Geospatial<br />
<strong>Institute</strong>, UK<br />
Dr Chaz Dixon<br />
Business Development Manager, GNSS<br />
Research & Applications Centre <strong>of</strong><br />
Excellence (GRACE), University <strong>of</strong><br />
Nottingham, UK<br />
Lunch<br />
09.00<br />
TUTORIAL 2 – UBIQUITOUS/INDOOR<br />
PLANNING<br />
CIVIL GPS SERVICE INTERFACE<br />
COMMITTEE<br />
INTERNATIONAL SUB-COMMITTEE<br />
PRE-MEETINGS<br />
13.00<br />
|<br />
Dr Chris Hide<br />
Senior Research Fellow,<br />
Nottingham Geospatial <strong>Institute</strong>, UK<br />
13.00 13.00<br />
<strong>14</strong>.00<br />
European Journal <strong>of</strong> <strong>Navigation</strong> (EJN)<br />
IAIN Officers<br />
17.00<br />
15.00<br />
EUGIN Council<br />
16.00<br />
EUGIN General Assembly<br />
17.00-19.00: Ice-breaker Reception in Exhibition area<br />
As at <strong>14</strong> Nov <strong>11</strong>
Tuesday 29 November<br />
SESSION 1 - INTRODUCTORY PLENARY<br />
Chair: Pr<strong>of</strong> Andy Norris - Vice-President RIN & Chair <strong>ENC</strong> Papers Committee<br />
09.00 Welcome<br />
Colin Beatty<br />
President RIN<br />
Rein van Gooswilligen<br />
Chair EUGIN<br />
Mike Penning MP<br />
Parliamentary Under-Secretary <strong>of</strong> State for Transport<br />
Keynotes<br />
09.25<br />
09.50<br />
10.15<br />
10.40<br />
Dr Michel Bosco<br />
Deputy Head <strong>of</strong> Unit, GNSS <strong>Prog</strong>rammes, European Commission, Brussels<br />
Pr<strong>of</strong> Chuang Shi<br />
Wuhan University, China<br />
Ed Parsons<br />
Geospatial Technologist, Google Inc, UK<br />
Lt Col Scott Boushell<br />
Senior Advisor, US Space-Based PNT Coordination Office<br />
10.55: C<strong>of</strong>fee break<br />
As at <strong>14</strong> Nov <strong>11</strong>
SESSION 2A - NAVIGATION TECHNOLOGY 1<br />
Chair: Bob Cockshott,<br />
ICT KTN, UK<br />
<strong>11</strong>.20 Precise Point Positioning and Integrity<br />
Monitoring with GPS and GLONASS<br />
Altti Jokinen, Imperial College London, UK<br />
<strong>11</strong>.45 Performance Improvement <strong>of</strong> RTK-<br />
GPS/GLONASS with the Calibration Tables <strong>of</strong><br />
Inter-channel Biases<br />
Hideki Yamada,<br />
Electronic <strong>Navigation</strong> Research <strong>Institute</strong>, Japan<br />
12.10 Digitization Guidelines for a Direct Sampling<br />
Dual Band GNSS Receiver for Civil Aviation<br />
Antoine Blais, ENAC, Toulouse, France<br />
12.35 Differential Joint Data and Pilot Channels<br />
Combination Strategies for Galileo E1 Open<br />
Service Signal Acquisition<br />
Kewen Sun, Politecnico di Torino, Italy<br />
SESSION 2B - INDOOR NAVIGATION 1<br />
Chair: Pr<strong>of</strong> Dorota Grejner-Bzrezinska,<br />
Ohio State University, USA<br />
Indoor <strong>Navigation</strong> Demonstrators (Frequencyhopping<br />
UWB / MEMS IMU)<br />
Dave Harmer, Thales UK<br />
Combining Synthetic Array Processing and<br />
Coherent Integration for Weak GNSS Signals<br />
Tracking<br />
Mohamed Sahmoudi, Institut Supérieur de<br />
l'Aéronautique et de l'Espace, France<br />
Real-time Wi-Fi Indoor Positioning System<br />
Roslee Mohd Sabri,<br />
The University <strong>of</strong> Edinburgh, UK<br />
Time-delayed Transmitter-based Indoor<br />
Positioning System - a Simple Electronic and<br />
Optical Architecture for Signal Generation<br />
Ikhlas Selmi, Institut Telecom, France<br />
13.00: Lunch<br />
SESSION 2C – INTERFER<strong>ENC</strong>E & JAMMING 1<br />
Chair: Philippe Laviron,<br />
Thales Avionics, France<br />
Spectrum Wars - Give Us This Day Our Daily<br />
Bread!<br />
Pr<strong>of</strong> David Last, RIN, UK<br />
Spectrum - The New Gold-rush<br />
Durk Van Willigen,<br />
Reelektronika b.v., Netherlands<br />
Detecting GPS Jamming and Interference<br />
Andy Proctor,<br />
Chronos Technology Ltd, UK<br />
GNSS Performance Monitoring for Timing and<br />
<strong>Navigation</strong><br />
Wolfgang Schuster,<br />
Imperial College London, UK<br />
As at <strong>14</strong> Nov <strong>11</strong>
SESSION 3 – ROUND TABLE DISCUSSION<br />
Chair: Pr<strong>of</strong> Vidal Ashkenazi - Chief Executive, Nottingham Scientific Ltd, UK<br />
<strong>14</strong>.00 Threats to and Vulnerabilities <strong>of</strong> GNSS Signals: Resilience and Countermeasures for Critical PNT Applications<br />
Dr Michel Bosco - Deputy Head <strong>of</strong> Unit, GNSS <strong>Prog</strong>rammes, European Commission, Brussels<br />
Dr Stefan Baumann - Project Leader, IABG GmbH, Ottobrun, Germany<br />
Capt Frank Parker - Commanding Officer, US Coast Guard <strong>Navigation</strong> Centre, US Dept <strong>of</strong> Homeland Security<br />
Olivier Crop - Head <strong>of</strong> Security Department, European GNSS Agency (GSA), Brussels<br />
Tim Just - Lead Technologist for Satellite <strong>Navigation</strong> at Technology Strategy Board, UK<br />
SESSION 4A - NAVIGATION TECHNOLOGY 2<br />
Chair: John Pottle,<br />
Spirent Communications, UK<br />
15.10 A Novel Multi-constellation Consumer<br />
Receiver with Communication Function by<br />
COMPASS-I<br />
Sun Yonggang, Beijing Microelectronics<br />
Technology <strong>Institute</strong>, China<br />
15.35 New Expressions for the Autocorrelation<br />
Function <strong>of</strong> Galileo Signals<br />
F Sousa, Instituto de Telecomunicacoes and<br />
ISEL, Portugal<br />
16.00 GLONASS/GPS Multiband Front-end<br />
Architectures for Integrated Circuits<br />
Alexander Ruegamer, Fraunh<strong>of</strong>er <strong>Institute</strong> for<br />
Integrated Circuits IIS, Germany<br />
SESSION 4B – INDOOR NAVIGATION 2<br />
Chair: Air Cdre ‘Pinky’ Grocott,<br />
RIN, UK<br />
Indoor Positioning and Objection Recognition<br />
for the Blind Using Smart-phone Sensors<br />
Dr Oluropo Ogundipe,<br />
University <strong>of</strong> Nottingham, UK<br />
Security Forces Localization in Indoor and<br />
Urban Environments<br />
Dr Andre Nuckelt,<br />
EADS Astrium, UK<br />
Estimation <strong>of</strong> Stride Length and Direction<br />
using IMU<br />
Pavel Davidson,<br />
Tampere University <strong>of</strong> Technology, Finland<br />
16.25: Tea Break<br />
SESSION 4C – THE ATMOSPHERE 1<br />
Chair: Air Cdre Norman Bonnor,<br />
RIN, UK<br />
An Assessment <strong>of</strong> the Effects <strong>of</strong> GNSS<br />
Scintillation in the UK<br />
Craig M Hancock,<br />
University <strong>of</strong> Nottingham, UK<br />
Solar Activity and the Effect on Positioning<br />
Systems - Early Examples <strong>of</strong> Disturbances in<br />
Solar Cycle 24<br />
Ole Ørpen, Fugro Seastar AS, Norway<br />
GPS/EGNOS Tropospheric Corrections for<br />
Mobility Applications: the Use <strong>of</strong> ZTD Maps<br />
within the SCUTUM Project<br />
Cecilia Sciarretta, e-GEOS SpA, Italy<br />
As at <strong>14</strong> Nov <strong>11</strong>
SESSION 5A - NAVIGATION TECHNOLOGY 3<br />
Chair: Dr Guenter Heinrichs,<br />
Galileo Services, France<br />
16.45 Development <strong>of</strong> a Real-time Multiconstellation,<br />
Multi-frequency GNSS Receiver<br />
Lan Yang, Beihang University, China<br />
17.10 Optimisation <strong>of</strong> Ternary Code Sequence for<br />
Location Detection Application Using RFID<br />
Tags<br />
Qudoos Yousuf,<br />
Leeds Metropolitan University, UK<br />
17.35 A Novel Architecture <strong>of</strong> FPGA-based<br />
Acquisition Scheme for LEO Satellite GPS<br />
Receivers Using System Generator<br />
Gaurangi Sahay,<br />
Indian Space Research Org<br />
SESSION 5B - INDOOR NAVIGATION 3<br />
Chair: Dr Sally Basker,<br />
RIN, UK<br />
Evaluation <strong>of</strong> Bluetooth Low Energy Beacons<br />
for Indoor Positioning<br />
Syed Usman, University <strong>of</strong> Edinburgh, UK<br />
Repeater based Indoor Positioning. Summary<br />
<strong>of</strong> experimental campaigns <strong>of</strong> measurements<br />
Anca Fluerasu,<br />
Institut Telecom, France<br />
A New Time Estimation Technique for High<br />
Accuracy Indoor WiFi Positioning<br />
Khalid Nur,<br />
Imperial College London, UK<br />
18.15-20.30: Reception in Exhibition area<br />
SESSION 5C - THE ATMOSPHERE 2<br />
Chair: Pr<strong>of</strong> David Last,<br />
RIN, UK<br />
Assessment <strong>of</strong> an Ionosphere Storm<br />
Occurrence Risk<br />
Suard Norbert, CNES, France<br />
Ionospheric Models Comparison for Singlefrequency<br />
GNSS Positioning<br />
S Gaglione,<br />
Parthenope University <strong>of</strong> Naples, Italy<br />
Future Radio Occultation Atmospheric<br />
Observation Technique Based on Multiple<br />
GNSS<br />
Kefei Zhang, <strong>Royal</strong> Melbourne <strong>Institute</strong> <strong>of</strong><br />
Technology, Australia<br />
As at <strong>14</strong> Nov <strong>11</strong>
Wednesday 30 November<br />
SESSION 6A<br />
- NAVIGATION TECHNOLOGY 4<br />
Chair: Roger McKinlay,<br />
Thales UK Ltd<br />
09.10 Neural Network based<br />
Architecture for Robust and<br />
Adaptive Code Tracking in GNSS<br />
Receivers<br />
Kewen Sun,<br />
Politecnico di Torino, Italy<br />
09.35 Performance Analysis <strong>of</strong> Low-<br />
Complexity VDLL Architectures<br />
for GNSS Signals<br />
F. Nunes,<br />
Instituto de Telecomunicacoes,<br />
Portugal<br />
10.00 Dual Sideband Coherent<br />
Combining Method for BOC<br />
Signal Acquisition with<br />
Ionosphere Delay Aided<br />
Ying Xiang Liu, Satellite <strong>Navigation</strong><br />
R&D Centre<br />
10.25 Multiantenna Multisatellite Code<br />
and Carrier Tracking<br />
Kaspar Giger,<br />
TU Muenchen, Germany<br />
SESSION 6B<br />
- AVIATION 1<br />
Chair: Dr Peter Brooker,<br />
Aviation Consultant, UK<br />
Evaluation <strong>of</strong> GBAS Flight Tests<br />
with Respect to GAST-D<br />
Requirements<br />
Michael Felux,<br />
German Aerospace Centre - DLR<br />
Flight Trials <strong>of</strong> the SBAS Offshore<br />
Approach Procedure<br />
Steven Leighton,<br />
Helios, UK<br />
Integrity for Today´s Dual<br />
Frequency ARNS/RNSS Bands<br />
Victoria Kropp,<br />
University FAF, Germany<br />
Investigation <strong>of</strong> EGNOS<br />
Availability on the East Border <strong>of</strong><br />
the System Coverage<br />
Andrzej Felski,<br />
Polish Naval Academy<br />
SESSION 6C<br />
- INTERFER<strong>ENC</strong>E & JAMMING 2<br />
Chair: Bob Cockshott,<br />
ICT KTN, UK<br />
The Testing Truth <strong>of</strong> GNSS<br />
Vulnerabilities<br />
Dr Chaz Dixon,<br />
University <strong>of</strong> Nottingham, UK<br />
An Effective Method for Jammer<br />
Localization in GBAS<br />
Heon Ho Choi,<br />
Chungnam National University,<br />
Korea<br />
SBAS Carrier Phase Jitter Impact<br />
on Ranging Error Due to X-<br />
Correlation<br />
Laurent Lestarquit,<br />
CNES, France<br />
Impact <strong>of</strong> Pseudolite Signals on<br />
Non-participating GNSS<br />
Receivers<br />
Daniele Borio, European<br />
Commission - Joint Research Centre<br />
SESSION 6D<br />
- LBS & NOVEL APPLICATIONS<br />
Chair: Rein van Gooswilligen,<br />
Chairman EUGIN<br />
Flight Demonstration <strong>of</strong> a 'Passive<br />
Reflectometry and Interferometric<br />
System' (PARIS) Instrument<br />
Sam Doody,<br />
Astrium Ltd, UK<br />
Collision-free Trajectory Planning<br />
and Local Obstacle Avoidance for<br />
MAVs<br />
Philipp Crocoll,<br />
Karlsruhe <strong>Institute</strong> <strong>of</strong> Technology,<br />
Germany<br />
Safe L1-only RTK <strong>Navigation</strong> for<br />
Outdoor Service Robotic<br />
Jean-Marie Codol,<br />
LAAS-CNRS, France<br />
Development <strong>of</strong> a Multi Reference<br />
Station-based Differential GNSS<br />
Test Bed<br />
Jyh-Ching Juang, National Cheng<br />
Kung University, Taiwan<br />
10.50: C<strong>of</strong>fee Break<br />
As at <strong>14</strong> Nov <strong>11</strong>
SESSION 7A<br />
- NAVIGATION TECHNOLOGY 5<br />
Chair: David Broughton,<br />
RIN, UK<br />
<strong>11</strong>.20 GNSS Shadow Matching Using a<br />
3D Model <strong>of</strong> London<br />
Dr Paul Groves & Lei Wang,<br />
University College London, UK<br />
<strong>11</strong>.45 Design <strong>of</strong> a TRN Tracking Loop: a<br />
Study on GPS Multipath Mitigation<br />
Strategies<br />
Patrick Oonincx,<br />
Netherlands Defence Academy<br />
12.10 Digitization Guidelines for a Direct<br />
Sampling Dual Band GNSS<br />
Receiver for Civil Aviation<br />
Antoine Blais,<br />
ENAC, Toulouse, France<br />
12.35 Decision Trees-based GPS Cycle<br />
Slip Detection and Correction<br />
Adel Moussa,<br />
University <strong>of</strong> Calgary, Canada<br />
SESSION 7B<br />
- AVIATION 2<br />
Chair: Air Cdre Norman Bonnor,<br />
RIN, UK<br />
General Aviation – Getting Ready<br />
for Flying EGNOS LPVs<br />
Pablo Haro,<br />
Aena-Satellite <strong>Navigation</strong> Division,<br />
Spain<br />
Operational Experience with<br />
SBAS Approaches<br />
David Pole,<br />
NATS, UK<br />
4D-Trajectory Air Traffic<br />
Management: Are there Killer<br />
Apps?<br />
Peter Brooker, Aviation Consultant,<br />
UK<br />
The Feasibility <strong>of</strong> Converting to<br />
True Direction as the Datum for<br />
Aviation Instructions, Procedures<br />
and Control<br />
Paul Hickley,<br />
RIN, UK<br />
SESSION 7C<br />
- INSTITUTIONAL ASPECTS<br />
Chair: Tim Just,<br />
Technology Strategy Board, UK<br />
UK Aviation <strong>Navigation</strong> Evolution<br />
and <strong>Prog</strong>rammes to 2020<br />
John Korna,<br />
NATS, UK<br />
ESSP Improved Interfaces with<br />
EGNOS Final Users<br />
Miguel-Angel Sánchez,<br />
ESSP SAS, France<br />
The World’s First Implementation<br />
<strong>of</strong> DGPS Service via Digital<br />
Multimedia Broadcasting<br />
Kwan-Dong Park,<br />
Inha University, South Korea<br />
A Low-cost High-performance<br />
GNSS Authentication Framework<br />
Based on Distributed S<strong>of</strong>tware<br />
Receiver Architecture<br />
Yeqiu Ying,<br />
Nottingham Scientific Limited, UK<br />
SESSION 7D<br />
- INTEGRATED NAVIGATION 1<br />
Chair: Pr<strong>of</strong> Andy Norris,<br />
RIN, UK<br />
Filter Architectures for Non-<br />
Coherent GPS/INS Deep<br />
Integration<br />
Stefan Kiesel, Karlsruhe <strong>Institute</strong> <strong>of</strong><br />
Technology, Germany<br />
Performance Evaluation <strong>of</strong> Ultra<br />
Tightly Coupled INS/GPS<br />
Integration Using a C/A Code GPS<br />
Receiver<br />
Christopher Mather, QinetiQ Ltd, UK<br />
Seamless <strong>Navigation</strong> in<br />
Transitional Environments<br />
Dorota Grejner-Brzezinska,<br />
Ohio State University, USA<br />
ATENEA: GNSS/INS/LIDAR<br />
Integration for Urban Mapping<br />
Antonio Fernández,<br />
DEIMOS Space, Spain<br />
13.00: Lunch<br />
<strong>14</strong>.00<br />
<strong>14</strong>.15<br />
SESSION 8 – PLENARY & USER SURVEY<br />
Chair: Andy Sage Helios, UK<br />
Keynote<br />
Gard Ueland<br />
Chairman, Galileo Services, France<br />
The <strong>ENC</strong> 20<strong>11</strong> Live Audience Survey - Sponsored by Helios<br />
As at <strong>14</strong> Nov <strong>11</strong>
SESSION 9A<br />
- NAVIGATION TECHNOLOGY 6<br />
Chair: Colin Beatty,<br />
RIN, UK<br />
15.15 All-constellation GNSS Receivers<br />
Dr Philip Mattos,<br />
STMicroelectronics R&D Ltd, UK<br />
15.40 Performance <strong>of</strong> the PRECISIO<br />
Multi-constellation, Multifrequency<br />
S<strong>of</strong>tware Receiver<br />
William Roberts,<br />
Nottingham Scientific Ltd, UK<br />
16.05 The Witch Navigator - a Low Cost<br />
S<strong>of</strong>tware Receiver for Education<br />
and Research<br />
Pavel Kovar,<br />
Czech Technical University in<br />
Prague<br />
SESSION 9B<br />
- UAV 1<br />
Chair: Pr<strong>of</strong> Peter Voersmann,<br />
DGON, Germany<br />
A Model Based <strong>Navigation</strong><br />
Architecture for Small Unmanned<br />
Aerial Vehicles<br />
Alexander Sendobry, Technische<br />
Universität Darmstadt, Germany<br />
A Real-time Visual Global<br />
Positioning System for Aerial<br />
Vehicles Based on GPU<br />
Accelerated Speeded-up Robust<br />
Features<br />
Hongyang Bai, Nanjing University <strong>of</strong><br />
Science and Technology, China<br />
The Performance Analysis <strong>of</strong> a<br />
DG-ready UAV-based Mapping<br />
System<br />
Meng-Lun Tsai,<br />
National Cheng Kung University,<br />
China<br />
SESSION 9C<br />
- ELORAN 1<br />
Chair: Pr<strong>of</strong> David Last,<br />
RIN, UK<br />
GLA Maritime eLoran Activities<br />
in 20<strong>11</strong><br />
Paul Williams, The General<br />
Lighthouse Authorities <strong>of</strong> the United<br />
Kingdom and Ireland<br />
Differential eLoran Trials in<br />
France<br />
Gerard Offermans,<br />
UrsaNav Inc, USA<br />
eLoran as a Back-up for PNT in<br />
Military Operations<br />
Anton Scheele,<br />
Netherlands Defence Academy<br />
SESSION 9D<br />
- INTEGRATED NAVIGATION 2<br />
Chair: Dai Zhen,<br />
German Aerospace Center<br />
Combined Statistical and<br />
Geometrical Satellite to Indoor<br />
Channel Characterization<br />
Iva Bartunkova,<br />
University FAF Munich, Germany<br />
Simplified Aided-INS Model for<br />
Analytical Assessment<br />
Itzik Klein,<br />
Technion Israel <strong>Institute</strong> <strong>of</strong><br />
Technology<br />
Performance Analysis <strong>of</strong><br />
Advanced GNSS Position<br />
Estimation Algorithms<br />
Lothar Kurz,<br />
RWTH Aachen University, Germany<br />
16.30: Tea Break<br />
As at <strong>14</strong> Nov <strong>11</strong>
SESSION 10A<br />
- LAND NAVIGATION 1 (TRAIN)<br />
Chair: Walter Blanchard,<br />
RIN, UK<br />
17.00 Proposal for a Ubiquitous Train<br />
Location Service<br />
Andrew Sage,<br />
Helios, UK<br />
17.25 An IMU as the Basic Vehicleborne<br />
Sensor within a Modified<br />
Multi-hypothesis<br />
Based Map-matching Algorithm<br />
for Train Positioning<br />
Christian Rahmig,<br />
German Aerospace Centre<br />
17.50 Structural Integrity Verification<br />
for Satellite-based Train<br />
Localisation Unit by Means <strong>of</strong><br />
Petri Net<br />
Debiao Lu, TU Braunschweig,<br />
<strong>Institute</strong> for Traffic Safety and<br />
Automation Engineering, Germany<br />
SESSION 10B<br />
- UAV 2<br />
Chair: Philip Church,<br />
Helios, UK<br />
An Approach to Sensor Data<br />
Fusion <strong>of</strong> GPS, INS and Air Data<br />
Claus-Sebastian Wilkens,<br />
<strong>Institute</strong> <strong>of</strong> Aerospace Systems, TU<br />
Braunschweig, Germany<br />
Essential Requirements on<br />
<strong>Navigation</strong> Systems for Synthetic<br />
Aperture Radars on Small or<br />
Unmanned Aerial Vehicles<br />
Dr Stephan Stanko,<br />
Fraunh<strong>of</strong>er FHR Wachtberg,<br />
Germany<br />
Positioning within UAV/UGV<br />
Swarms using Cooperative<br />
GNSS/IMU Systems<br />
Simon Batzdorfer,<br />
<strong>Institute</strong> <strong>of</strong> Flight Guidance,<br />
TU Braunschweig, Germany<br />
SESSION 10C<br />
- ELORAN 2<br />
Chair: Dr Sally Basker,<br />
RIN, UK<br />
The Use <strong>of</strong> a Horizontal<br />
Protection Level Equation to<br />
Assess the Accuracy and<br />
Integrity Performance <strong>of</strong> the<br />
eLoran System<br />
Chris Hargreaves, General<br />
Lighthouse Authorities <strong>of</strong> the UK<br />
and Ireland<br />
Deriving Stratum-1 Time-<strong>of</strong>-day<br />
and Frequency using a Pulsed<br />
Low-frequency System: Design<br />
and Test Results <strong>of</strong> an eLoran<br />
Timing Receiver<br />
Gerard Offermans,<br />
UrsaNav Inc, USA<br />
Suitability <strong>of</strong> Low-frequency<br />
<strong>Navigation</strong> Systems for Artillery<br />
Positioning in a GNSS-denied<br />
Environment<br />
Patrick Oonincx,<br />
Netherlands Defence Academy<br />
SESSION 10D<br />
- INTEGRATED NAVIGATION 3<br />
Chair: Pr<strong>of</strong> Dr Gert Trommer,<br />
Karlsruhe <strong>Institute</strong> <strong>of</strong> Technology,<br />
Germany<br />
Algorithms for GNSS Positioning<br />
in Difficult Scenario<br />
Antonio Angrisano,<br />
University Parthenope <strong>of</strong> Naples,<br />
Italy<br />
Optimal Codes for GNSS-like<br />
Signals for Indoor Positioning<br />
Ikhlas Selmi,<br />
Institut Telecom, France<br />
Server-side On-demand<br />
Positioning for Open Access and<br />
Regulated GNSS<br />
William Roberts,<br />
Nottingham Scientific Ltd, UK<br />
19.30: Conference Dinner<br />
As at <strong>14</strong> Nov <strong>11</strong>
SESSION <strong>11</strong>A - MARITIME 1<br />
Chair: Capt Dick Smith RN,<br />
RIN, UK<br />
9.10 An Ant Colony Algorithm for Efficient Ship<br />
Routing<br />
Ming-Cheng Tsou,<br />
National Kaohsiung Marine University, Taiwan<br />
9.35 Radar Positioning<br />
Dr Nick Ward,<br />
General Lighthouse Authorities <strong>of</strong> the UK and<br />
Ireland<br />
10.00 Anti-pirate System<br />
Giorgio Guglielmetti,<br />
SELEX SI, Italy<br />
10.25 Challenges in the Transition to Electronic<br />
<strong>Navigation</strong><br />
Nick Lambert,<br />
UK Hydrographic Office<br />
Thursday 1 December<br />
SESSION <strong>11</strong>B - LAND NAVIGATION 2<br />
Chair: Hansjoerg Manz,<br />
TU Braunschweig, Germany<br />
Use <strong>of</strong> EGNOS in Road Environments: the<br />
SCUTUM Multipath Mitigation Algorithm<br />
Antonella Di Fazio,<br />
Telespazio, Italy<br />
Accuracy Assessment <strong>of</strong> Location<br />
Fingerprinting<br />
Mohamed Khalaf-Allah,<br />
Umm Al-Qura University, Saudi Arabia<br />
Fast Signal Reacquisition for Automotive<br />
Applications based on Vehicle Sensor<br />
Measurements<br />
Hans-Georg Büsing,<br />
<strong>Institute</strong> <strong>of</strong> Flight Guidance, TU Braunschweig<br />
Performance Analysis <strong>of</strong> Road Lane<br />
Recognition using CDGPS and Lane<br />
Constraint<br />
Wooyong Kang,<br />
Korea Aerospace Research <strong>Institute</strong><br />
10.50: Tea Break<br />
SESSION <strong>11</strong>C - SURVEY & GEODESY 1<br />
Chair: Pr<strong>of</strong> Terry Moore,<br />
University <strong>of</strong> Nottingham, UK<br />
Precise Single-Frequency Positioning using<br />
the Full Potential <strong>of</strong> Galileo E5 Signal<br />
Diessongo Toho Herman,<br />
University <strong>of</strong> the Federal Armed Forces, Germany<br />
Precise Point Positioning for Real-time<br />
Applications<br />
Christian Rahmig,<br />
Graz University <strong>of</strong> Technology, Austria<br />
Apex – A High Accuracy Service for Global<br />
Real-time Precise Point Positioning with GPS<br />
and GLONASS<br />
Pieter Toor,<br />
VERIPOS Ltd, UK<br />
Reliable Estimation <strong>of</strong> Absolute Satellite<br />
Phase Biases with a Regional Network<br />
Zhibo Wen,<br />
TU Munich, Germany<br />
As at <strong>14</strong> Nov <strong>11</strong>
SESSION 12A - MARITIME 2<br />
Chair: Rein van Gooswilligen,<br />
Chairman EUGIN<br />
<strong>11</strong>.20 TeamSurv - Crowd Sourcing in Chart Creation<br />
Tim Thornton,<br />
Smartcom S<strong>of</strong>tware, UK<br />
<strong>11</strong>.45 ECDIS Simulation Trials on <strong>Navigation</strong><br />
Applications<br />
Hua-Zhi Hsu,<br />
National Kaohsiung Marine University, Taiwan<br />
12.10 Towards Next Generation VTS; Improving the<br />
VTS Operator Experience<br />
Benjamin Jakobus,<br />
Transas Marine Ltd, Ireland<br />
12.35 Using the Navi Trainer Pro 5000 S<strong>of</strong>tware<br />
Simulator to Evaluate the Designed <strong>Navigation</strong><br />
Infrastructure<br />
Czaplewski Krzyszt<strong>of</strong>,<br />
Polish Naval Academy<br />
SESSION 13A - MARITIME 3<br />
Chair: Peter Chapman-Andrews,<br />
RIN<br />
<strong>14</strong>.00 The SafePort Project (Safe Port Operations<br />
using EGNOS SoL Services)<br />
Gianlucam Marucco,<br />
Istituto Superiore Mario Boella, Italy<br />
<strong>14</strong>.25 The On-board Maritime PNT Module – a Focus<br />
on Integrity Monitoring and Preliminary<br />
Results<br />
Zhen Dai,<br />
German Aerospace Centre (DLR)<br />
<strong>14</strong>.50 Detection and Identification Methods <strong>of</strong><br />
Satellite Anomaly for Maritime DGPS RSIM<br />
Ki-Yeol Seo,<br />
Korea Ocean Research & Development <strong>Institute</strong><br />
SESSION 12B - LAND NAVIGATION 3<br />
Chair: Xiaolin Meng,<br />
Nottingham Geospatial <strong>Institute</strong>, UK<br />
Using Linear Referencing to Identify Traffic<br />
Accident Hotspot for ADAS Applications<br />
Hao Ye,<br />
University <strong>of</strong> Nottingham, UK<br />
Driver Intent Prediction for Urban Driver<br />
Assistance Systems Using High Level<br />
Information and Detailed Map Data within the<br />
GENEVA Project<br />
Simon Herrmann,<br />
Volkswagen AG - Group Research, Germany<br />
AutomotiveGATE and RailGATE Test Areas<br />
for Galileo-based Vehicle Guidance<br />
Thomas Engelhardt, RWTH Aachen,<br />
<strong>Institute</strong> <strong>of</strong> Automatic Control, Germany<br />
The Potential <strong>of</strong> P2P Collaborative Positioning<br />
via UWB Augmented GPS in GPS-challenged<br />
Environments<br />
Mohd Hafiz Yahya,<br />
Universiti Teknologi Malaysia<br />
13.00: Lunch<br />
SESSION 13B - LAND NAVIGATION 4<br />
Dr Xiaolin Meng<br />
Nottingham Geospatial <strong>Institute</strong>, UK<br />
GNSS and the Future <strong>of</strong> Intelligent Transport<br />
Systems (ITS)<br />
Andrew Sage,<br />
Helios, UK<br />
Robust Positioning for ITS Applications<br />
through GPS/INS Integration<br />
Dr Phil Harris,<br />
Thales UK<br />
Precision <strong>of</strong> Network Real Time Kinematic<br />
Positioning for Intelligent Transport Systems<br />
Scott Stephenson,<br />
University <strong>of</strong> Nottingham, UK<br />
SESSION 12C - SURVEY & GEODESY 2<br />
Chair: Pr<strong>of</strong> Terry Moore,<br />
University <strong>of</strong> Nottingham, UK<br />
DGPS Beacon Stations Today - Latest<br />
Technology Improvements<br />
Dennis Kilian,<br />
Trimble Germany GmbH<br />
Augmentation <strong>of</strong> GNSS Utilising a Groundbased<br />
<strong>Navigation</strong> System (Locata) in a<br />
Kinematic Type Urban Environment<br />
Lukasz Bonenberg,<br />
University <strong>of</strong> Nottingham, UK<br />
Performance Analysis <strong>of</strong> High-sensitivity<br />
Carrier-phase Positioning Using <strong>Navigation</strong>grade<br />
Receiver<br />
Andrei Octavian, Aalto University, Finland<br />
Synergetic Use <strong>of</strong> GNSS and SAR<br />
Interferometry for Landslide Precursor<br />
Displacement Detection<br />
Alan Fromberg,<br />
Systems Engineering & Assessment Ltd, UK<br />
SESSION 13C - SPACE & TIME<br />
Chair: Air Cdre ‘Pinky’ Grocott,<br />
RIN, UK<br />
GNSS Remote Sensing Instrument for<br />
TechDemoSat-1<br />
Paul Blunt,<br />
Surrey Satellite Technology Ltd, UK<br />
Relativistic satellite clock modelling in GPS<br />
with a complete Earth Gravity Model<br />
Santosh Bhattarai,<br />
University College London, UK<br />
Satellite Orbit Determination using Groundbased<br />
<strong>Navigation</strong> Data<br />
Ruben Yousuf,<br />
COM DEV International Ltd, Canada<br />
As at <strong>14</strong> Nov <strong>11</strong>
SESSION <strong>14</strong> - CLOSING PLENARY<br />
Chair: David Broughton - Sec Gen IAIN & Chair <strong>ENC</strong> Organising Committee<br />
15.30 Conference Summary<br />
Dr Sally Basker, Chair RIN Technical Committee<br />
<strong>ENC</strong> 2012<br />
Polish <strong>Navigation</strong> Forum<br />
Handover <strong>of</strong> EUGIN Chairmanship<br />
Rein van Gooswilligen, Chairman EUGIN<br />
Farewell<br />
David Broughton<br />
~16.15: Close<br />
ROOM LOCATIONS<br />
Salisbury<br />
Floor Minus 2<br />
Bartholomew<br />
Floor Plus 1<br />
Harpley<br />
Floor Plus 1<br />
Beaument<br />
Floor Plus 1<br />
As at <strong>14</strong> Nov <strong>11</strong>