

Review & today's topics State feedback - UBC Mechanical ...
Review & today's topics State feedback - UBC Mechanical ...
Review & today's topics State feedback - UBC Mechanical ...

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
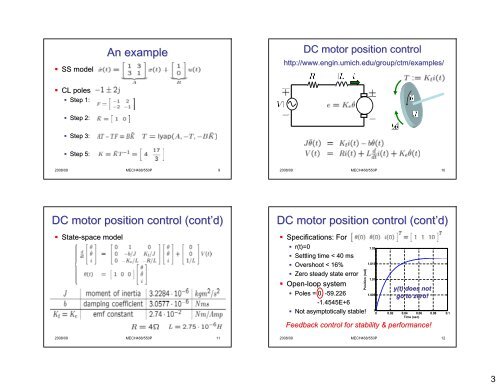
• SS model<br />
An example<br />
DC motor position control<br />
http://www.engin.umich.edu/group/ctm/examples<br />
www.engin.umich.edu/group/ctm/examples/<br />
• CL poles<br />
• Step 1:<br />
• Step 2:<br />
• Step 3:<br />
• Step 5:<br />
2008/09 MECH468/550P 9<br />
2008/09 MECH468/550P 10<br />
DC motor position control (cont’d)<br />
• <strong>State</strong>-space model<br />
2008/09 MECH468/550P 11<br />
DC motor position control (cont’d)<br />
• Specifications: For<br />
• r(t)=0<br />
• Settling time < 40 ms<br />
• Overshoot < 16%<br />
• Zero steady state error<br />
• Open-loop system<br />
• Poles = 0, -59.226<br />
-1.4545E+6<br />
• Not asymptotically stable!<br />
1<br />
0 0.02 0.04 0.06 0.08 0.1<br />
Time (sec)<br />
Feedback control for stability & performance!<br />
Position (rad)<br />
2008/09 MECH468/550P 12<br />
1.02<br />
1.015<br />
1.01<br />
1.005<br />
y(t) ) does not<br />
go to zero!<br />
3













