

DT Kalman filter - UBC Mechanical Engineering - University of ...
DT Kalman filter - UBC Mechanical Engineering - University of ...
DT Kalman filter - UBC Mechanical Engineering - University of ...

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
Remarks<br />
• Separation principle holds! Thus, we can design LQR<br />
controller and <strong>Kalman</strong> <strong>filter</strong> independently.<br />
• The feedback structure is same as observer-based<br />
based<br />
control. Thus, in infinite horizon LQR plus steady state<br />
KF cases, the eigenvalues <strong>of</strong> closed-loop loop A-matrix A<br />
consists <strong>of</strong> the A-matrix A<br />
<strong>of</strong> LQR feedback system with full<br />
state feedback, and the A-matrix A<br />
<strong>of</strong> <strong>Kalman</strong> <strong>filter</strong>.<br />
• Recall that LQR has a good robust stability property<br />
expressed by gain and phase margin (in SISO cases).<br />
However, it is known that LQG may possibly lose such<br />
good property (Doyle & Stein). This fact motivated<br />
development <strong>of</strong> robust control theory.<br />
Outline<br />
• Review <strong>of</strong> discrete-time<br />
time <strong>Kalman</strong> <strong>filter</strong><br />
• Duality between LQR and <strong>Kalman</strong> <strong>filter</strong><br />
• Steady-state<br />
<strong>Kalman</strong> <strong>filter</strong><br />
• Linear Quadratic Gaussian<br />
• Summary <strong>of</strong> the course<br />
2008/09 MECH468/550P 21<br />
2008/09 MECH468/550P 22<br />
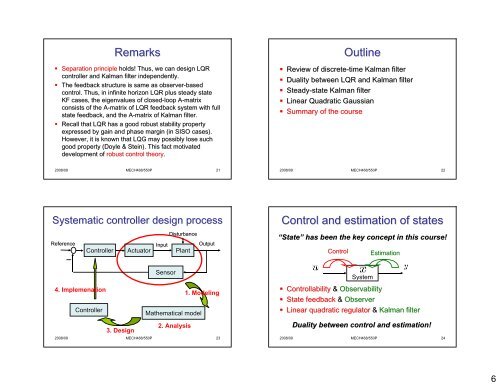
Systematic controller design process<br />
Reference<br />
Controller<br />
Actuator<br />
Input<br />
Disturbance<br />
Plant<br />
Output<br />
Control and estimation <strong>of</strong> states<br />
“State” has been the key concept in this course!<br />
Control<br />
Estimation<br />
4. Implemenation<br />
Controller<br />
3. Design<br />
Sensor<br />
1. Modeling<br />
Mathematical model<br />
2. Analysis<br />
2008/09 MECH468/550P 23<br />
System<br />
• Controllability & Observability<br />
• State feedback & Observer<br />
• Linear quadratic regulator & <strong>Kalman</strong> <strong>filter</strong><br />
Duality between control and estimation!<br />
2008/09 MECH468/550P 24<br />
6













