Spring Pendulum Dynamic System - Mechatronics
Spring Pendulum Dynamic System - Mechatronics
Spring Pendulum Dynamic System - Mechatronics

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
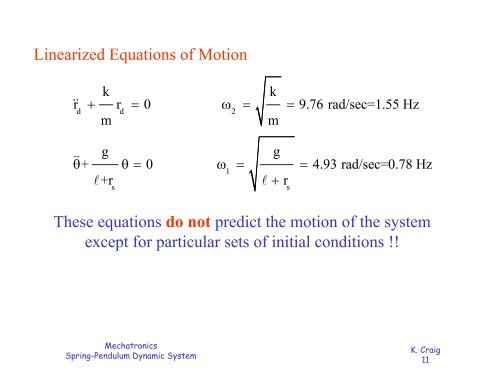
Linearized Equations of Motion<br />
k<br />
k<br />
r + r = 0 ω = = 9.76 rad/sec=1.55 Hz<br />
d d 2<br />
m<br />
m<br />
g<br />
g<br />
θ+ θ = 0 ω = = 4.93 rad/sec=0.78 Hz<br />
1<br />
+r + r<br />
s<br />
s<br />
These equations do not predict the motion of the system<br />
except for particular sets of initial conditions !!<br />
<strong>Mechatronics</strong><br />
<strong>Spring</strong>-<strong>Pendulum</strong> <strong>Dynamic</strong> <strong>System</strong><br />
K. Craig<br />
11