Spring Pendulum Dynamic System - Mechatronics
Spring Pendulum Dynamic System - Mechatronics
Spring Pendulum Dynamic System - Mechatronics
SHOW LESS

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
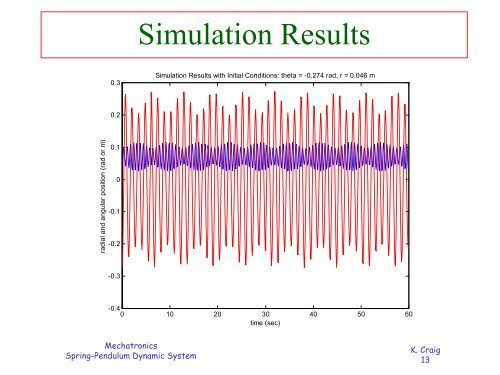
Simulation Results<br />
0.3<br />
Simulation Results with Initial Conditions: theta = -0.274 rad, r = 0.046 m<br />
0.2<br />
radial and angular position (rad or m)<br />
0.1<br />
0<br />
-0.1<br />
-0.2<br />
-0.3<br />
-0.4<br />
0 10 20 30 40 50 60<br />
time (sec)<br />
<strong>Mechatronics</strong><br />
<strong>Spring</strong>-<strong>Pendulum</strong> <strong>Dynamic</strong> <strong>System</strong><br />
K. Craig<br />
13