COMPLEX GEOMETRY Course notes
COMPLEX GEOMETRY Course notes
COMPLEX GEOMETRY Course notes

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
2.9 Topology of Riemann surfaces<br />
One known fact about Riemann surfaces is that any Riemann surface is orientable. Recall that a manifold<br />
is orientable if its transition functions have positive Jacobian . Let Z be a Riemann surface, consider two<br />
intersecting charts U α and U β , and let z ∈ U α ∩ U β . Then we have<br />
df<br />
dz (z) = f ′ (z)<br />
as an R-matrix.<br />
We write f = u + iv, then df = α + iβ.<br />
β<br />
α ◦ β −1<br />
holomorphic<br />
α<br />
C<br />
By the Cauchy-Riemann equations, we have<br />
( α β<br />
df =<br />
−β α<br />
)<br />
and so<br />
Jac(α ◦ β −1 ) = det(D(α ◦ β −1 )) = |df| 2 = det(df) = α 2 + β 2 > 0.<br />
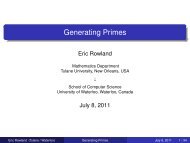
It is also known that every Riemann surface is obtained by attaching handles to CP 1 = S 2 .<br />
# handles = # holes = : topological genus = g<br />
∞<br />
0<br />
Theorem 2.9.1. Any Riemann surface is triangularizable.<br />
24