Object based contour detection by using Graph-cut on Stereo image
Object based contour detection by using Graph-cut on Stereo image
Object based contour detection by using Graph-cut on Stereo image

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
label assingning L p {1,2,3}. This labeling means segment<br />
<strong>image</strong> that we want[2][4].<br />
We can formulate a standard form of the energy functi<strong>on</strong><br />
to solve this pixel labeling problem[1][2][3][4][5].<br />
The form of energy functi<strong>on</strong> is<br />
E( f ) E ( f ) E ( f )<br />
E data (f) and E smooth (f) can be also represented as follows<br />
E ( f ) <br />
This functi<strong>on</strong> includes a variety of different c<strong>on</strong>cept such<br />
as first-order Markov Random Fields. D p (f p ) is a data<br />
penalty functi<strong>on</strong> and it means that how well assign a label<br />
f p to a pixel p given the observed data. V p,q (f p , f q )<br />
penalizing between neighboring pixels p, qN is spatial<br />
smoothness term. N is the set of neighboring pixels of<br />
left <strong>image</strong>. V can be separated from metric and<br />
semi-metric. For any labels , , L<br />
V(, ) = 0 = (2)<br />
V(, ) = V(, ) (3)<br />
V(, ) V(, ) + V(, ) (4) <br />
If V satisfy (2),(3) and (4), V is metric <strong>on</strong> the space of<br />
Label L. Also V is called a semi-metric if it satisfies <strong>on</strong>ly<br />
(2),(3)[2]. We can specify this equati<strong>on</strong> <str<strong>on</strong>g>by</str<strong>on</strong>g> potts model as<br />
follows.<br />
E ( f ) <br />
<br />
pP<br />
<br />
pL<br />
data<br />
D<br />
D<br />
p<br />
p<br />
( f<br />
( f<br />
p<br />
p<br />
) <br />
) <br />
smooth<br />
<br />
V<br />
p.<br />
qN<br />
<br />
V<br />
p . qN<br />
p , q<br />
( f<br />
T<br />
, f<br />
Here T() is 1 if its argument is true and 0 otherwise[1][3].<br />
Our goal is to find labeling f for local<br />
minimum to minimize energy functi<strong>on</strong>(1). We can also<br />
use -expansi<strong>on</strong> move algorithm to generate labeling f.<br />
This is a str<strong>on</strong>g move allowing many pixels to change<br />
their labels to simultaneously. Given a label ,<br />
-expansi<strong>on</strong> is a move from a partiti<strong>on</strong> P(labeling f) to a<br />
new partiti<strong>on</strong> P’ if P P ’ and P l ’ P l for any label l <br />
[2].<br />
In pixel labeling problem, We have to find f that minimize<br />
energy functi<strong>on</strong>. To solve this problem, We can use<br />
graph <str<strong>on</strong>g>cut</str<strong>on</strong>g> method.<br />
p<br />
f<br />
p , q<br />
(<br />
p q<br />
)<br />
q<br />
)<br />
<br />
f<br />
(1)<br />
thickness.<br />
As menti<strong>on</strong>ed above, graph <str<strong>on</strong>g>cut</str<strong>on</strong>g> is used for finding f to<br />
minimize energy functi<strong>on</strong>. A weighted graph G = V,<br />
Ehave two special nodes that are called terminals. V is<br />
the set of vertices and E is the set of edge. The terminals<br />
are {s, t} that means source and sink. In this paper, the<br />
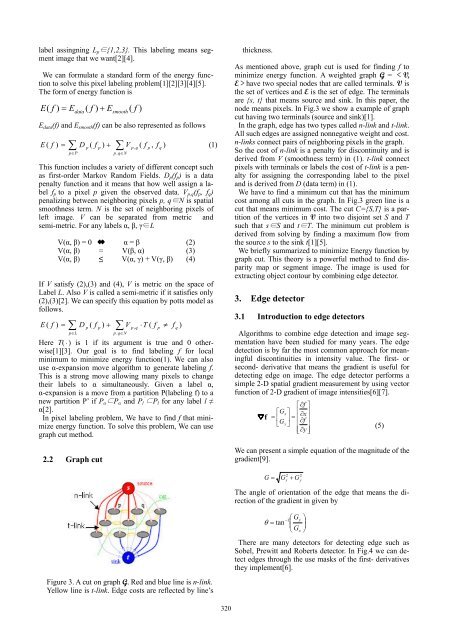
node means pixels. In Fig.3 we show a example of graph<br />
<str<strong>on</strong>g>cut</str<strong>on</strong>g> having two terminals (source and sink)[1].<br />
In the graph, edge has two types called n-link and t-link.<br />
All such edges are assigned n<strong>on</strong>negative weight and cost.<br />
n-links c<strong>on</strong>nect pairs of neighboring pixels in the graph.<br />
So the cost of n-link is a penalty for disc<strong>on</strong>tinuity and is<br />
derived from V (smoothness term) in (1). t-link c<strong>on</strong>nect<br />
pixels with terminals or labels the cost of t-link is a penalty<br />
for assigning the corresp<strong>on</strong>ding label to the pixel<br />
and is derived from D (data term) in (1).<br />
We have to find a minimum <str<strong>on</strong>g>cut</str<strong>on</strong>g> that has the minimum<br />
cost am<strong>on</strong>g all <str<strong>on</strong>g>cut</str<strong>on</strong>g>s in the graph. In Fig.3 green line is a<br />
<str<strong>on</strong>g>cut</str<strong>on</strong>g> that means minimum cost. The <str<strong>on</strong>g>cut</str<strong>on</strong>g> C={S,T} is a partiti<strong>on</strong><br />
of the vertices in V into two disjoint set S and T<br />
such that s S and tT. The minimum <str<strong>on</strong>g>cut</str<strong>on</strong>g> problem is<br />
derived from solving <str<strong>on</strong>g>by</str<strong>on</strong>g> finding a maximum flow from<br />
the source s to the sink t[1][5].<br />
We briefly summarized to minimize Energy functi<strong>on</strong> <str<strong>on</strong>g>by</str<strong>on</strong>g><br />
graph <str<strong>on</strong>g>cut</str<strong>on</strong>g>. This theory is a powerful method to find disparity<br />
map or segment <strong>image</strong>. The <strong>image</strong> is used for<br />
extracting object <str<strong>on</strong>g>c<strong>on</strong>tour</str<strong>on</strong>g> <str<strong>on</strong>g>by</str<strong>on</strong>g> combining edge detector.<br />
3. Edge detector<br />
3.1 Introducti<strong>on</strong> to edge detectors<br />
Algorithms to combine edge <str<strong>on</strong>g>detecti<strong>on</strong></str<strong>on</strong>g> and <strong>image</strong> segmentati<strong>on</strong><br />
have been studied for many years. The edge<br />
<str<strong>on</strong>g>detecti<strong>on</strong></str<strong>on</strong>g> is <str<strong>on</strong>g>by</str<strong>on</strong>g> far the most comm<strong>on</strong> approach for meaningful<br />
disc<strong>on</strong>tinuities in intensity value. The first- or<br />
sec<strong>on</strong>d- derivative that means the gradient is useful for<br />
detecting edge <strong>on</strong> <strong>image</strong>. The edge detector performs a<br />
simple 2-D spatial gradient measurement <str<strong>on</strong>g>by</str<strong>on</strong>g> <str<strong>on</strong>g>using</str<strong>on</strong>g> vector<br />
functi<strong>on</strong> of 2-D gradient of <strong>image</strong> intensities[6][7].<br />
f<br />
f<br />
<br />
<br />
f x <br />
Gy<br />
<br />
<br />
y<br />
<br />
(5)<br />
G x<br />
2<br />
2.2 <str<strong>on</strong>g>Graph</str<strong>on</strong>g> <str<strong>on</strong>g>cut</str<strong>on</strong>g><br />
We can present a simple equati<strong>on</strong> of the magnitude of the<br />
gradient[9].<br />
G <br />
2<br />
G x<br />
G y<br />
The angle of orientati<strong>on</strong> of the edge that means the directi<strong>on</strong><br />
of the gradient in given <str<strong>on</strong>g>by</str<strong>on</strong>g><br />
Figure 3. A <str<strong>on</strong>g>cut</str<strong>on</strong>g> <strong>on</strong> graph G. Red and blue line is n-link.<br />
Yellow line is t-link. Edge costs are reflected <str<strong>on</strong>g>by</str<strong>on</strong>g> line’s<br />
tan<br />
1<br />
G<br />
<br />
G<br />
y<br />
x<br />
<br />
<br />
<br />
There are many detectors for detecting edge such as<br />
Sobel, Prewitt and Roberts detector. In Fig.4 we can detect<br />
edges through the use masks of the first- derivatives<br />
they implement[6].<br />
320