

Camera Calibration Based on 2D-plane - Academy Publisher
Camera Calibration Based on 2D-plane - Academy Publisher
Camera Calibration Based on 2D-plane - Academy Publisher

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
B. Solve camera parameter matrix<br />
The soluti<strong>on</strong> of the camera parameter matrix can be<br />
seen Literature[6].<br />
III. EXPERIMENT AND RESULTS<br />
A. Experiment materials<br />
KOKO camera; Image gathering card; Computer;<br />
Tripod; 7×9 the black and white interacti<strong>on</strong>'s chess<br />
discoid grid <strong>2D</strong> <strong>plane</strong> target (as shown in Figure 1), each<br />
grid size for 28×28 millimeter; Horiz<strong>on</strong>tal ir<strong>on</strong> sheet<br />
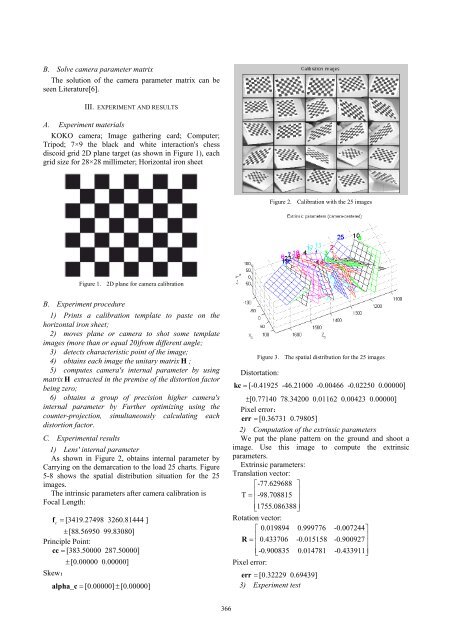
Figure 2. <str<strong>on</strong>g>Calibrati<strong>on</strong></str<strong>on</strong>g> with the 25 images<br />
Figure 1. <strong>2D</strong> <strong>plane</strong> for camera calibrati<strong>on</strong><br />
B. Experiment procedure<br />
1) Prints a calibrati<strong>on</strong> template to paste <strong>on</strong> the<br />
horiz<strong>on</strong>tal ir<strong>on</strong> sheet;<br />
2) moves <strong>plane</strong> or camera to shot some template<br />
images (more than or equal 20)from different angle;<br />
3) detects characteristic point of the image;<br />
4) obtains each image the unitary matrix H ;<br />
5) computes camera's internal parameter by using<br />
matrix H extracted in the premise of the distorti<strong>on</strong> factor<br />
being zero;<br />
6) obtains a group of precisi<strong>on</strong> higher camera's<br />
internal parameter by Further optimizing using the<br />
counter-projecti<strong>on</strong>, simultaneously calculating each<br />
distorti<strong>on</strong> factor.<br />
C. Experimental results<br />
1) Lens' internal parameter<br />
As shown in Figure 2, obtains internal parameter by<br />
Carrying <strong>on</strong> the demarcati<strong>on</strong> to the load 25 charts. Figure<br />
5-8 shows the spatial distributi<strong>on</strong> situati<strong>on</strong> for the 25<br />
images.<br />
The intrinsic parameters after camera calibrati<strong>on</strong> is<br />
Focal Length:<br />
f = c<br />
[3419.27498 3260.81444 ]<br />
±[88.56950 99.83080]<br />
Principle Point:<br />
cc = [383.50000 287.50000]<br />
± [0.00000 0.00000]<br />
Skew:<br />
alpha_c = [0.00000] ± [0.00000]<br />
Figure 3. The spatial distributi<strong>on</strong> for the 25 images<br />
Distortati<strong>on</strong>:<br />
kc = [-0.41925 -46.21000 -0.00466 -0.02250 0.00000]<br />
± [0.77140 78.34200 0.01162 0.00423 0.00000]<br />
Pixel error:<br />
err = [0.36731 0.79805]<br />
2) Computati<strong>on</strong> of the extrinsic parameters<br />
We put the <strong>plane</strong> pattern <strong>on</strong> the ground and shoot a<br />
image. Use this image to compute the extrinsic<br />
parameters.<br />
Extrinsic parameters:<br />
Translati<strong>on</strong> vector:<br />
⎡-77.629688<br />
⎤<br />
T =<br />
⎢<br />
-98.708815<br />
⎥<br />
⎢ ⎥<br />
⎢⎣<br />
1755.086388⎥⎦<br />
Rotati<strong>on</strong> vector:<br />
⎡ 0.019894 0.999776 -0.007244⎤<br />
R =<br />
⎢<br />
0.433706 -0.015158 -0.900927<br />
⎥<br />
⎢ ⎥<br />
⎢⎣<br />
-0.900835 0.014781 -0.433911⎥⎦<br />
Pixel error:<br />
err = [0.32229 0.69439]<br />
3) Experiment test<br />
366













