

Camera Calibration Based on 2D-plane - Academy Publisher
Camera Calibration Based on 2D-plane - Academy Publisher
Camera Calibration Based on 2D-plane - Academy Publisher

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
TABLE I.<br />
THE COORDINATE OF MARKED POINTS AND THEIR CALIBRATION ERROR<br />
Marked points<br />
Image coordinate<br />
Real world coordinate<br />
Computati<strong>on</strong>al world<br />
coordinate<br />
u( pixels ) v( pixels ) x( cm ) ycm ( ) xˆ( cm ) ycm ˆ( )<br />
x directi<strong>on</strong>(<br />
cm<br />
)<br />
error<br />
y directi<strong>on</strong><br />
( cm )<br />
1 26 281 23.5 -9.5 21.74 -8.90 -1.76 0.60<br />
2 47 354 32 -7.5 29.39 -7.42 -2.61 0.08<br />
3 50 126 3 -10 3.00 -9.08 0.00 0.92<br />
4 60 195 13.5 -8.5 11.85 -8.00 -1.65 0.50<br />
5 81 496 46.5 -5 42.50 -5.17 -4.00 -0.17<br />
6 104 76 -4.5 -7.5 -3.86 -6.73 0.64 0.77<br />
7 183 258 20.5 -1.5 19.44 -1.85 -1.06 -0.35<br />
8 208 163 9 -1 8.12 -1.00 -0.88 0.00<br />
9 231 103 0 0 0.20 -0.03 0.20 -0.03<br />
10 235 402 37 1.5 34.32 0.82 -2.68 -0.68<br />
11 366 267 22 7.5 20.74 6.55 -1.26 -0.95<br />
12 367 435 40 7.5 37.55 6.34 -2.45 -1.16<br />
13 367 62 -6.5 7.5 -5.37 7.00 1.13 -0.50<br />
14 370 206 14.5 8 13.72 6.85 -0.78 -1.15<br />
15 373 122 3 8 3.06 7.18 0.06 -0.82<br />
16 375 559 52 7.5 48.02 6.48 -3.98 -1.02<br />
17 431 346 31 10.5 29.16 9.25 -1.84 -1.25<br />
18 535 238 18 16 17.74 14.46 -0.26 -1.54<br />
19 544 96 -1 17.5 -1.74 16.00 -0.74 -1.50<br />
20 552 395 36 16 34.11 14.21 -1.89 -1.79<br />
21 588 166 9.5 19.5 9.18 17.57 -0.32 -1.93<br />
22 689 82 -3 26 -1.86 23.61 1.14 -2.39<br />
23 721 430 40 23.5 37.58 20.98 -2.42 -2.52<br />
24 723 295 25 25 24.34 22.51 -0.66 -2.49<br />
25 725 515 48 23 44.92 20.34 -3.08 -2.66<br />
26 730 164 9 27 9.18 24.51 0.18 -2.49<br />
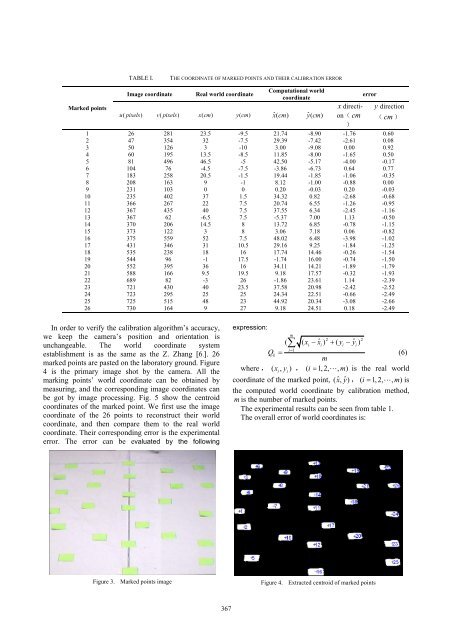
In order to verify the calibrati<strong>on</strong> algorithm’s accuracy,<br />
we keep the camera’s positi<strong>on</strong> and orientati<strong>on</strong> is<br />
unchangeable. The world coordinate system<br />
establishment is as the same as the Z. Zhang [6.]. 26<br />
marked points are pasted <strong>on</strong> the laboratory ground. Figure<br />
4 is the primary image shot by the camera. All the<br />
marking points’ world coordinate can be obtained by<br />
measuring, and the corresp<strong>on</strong>ding image coordinates can<br />
be got by image processing. Fig. 5 show the centroid<br />
coordinates of the marked point. We first use the image<br />
coordinate of the 26 points to rec<strong>on</strong>struct their world<br />
coordinate, and then compare them to the real world<br />
coordinate. Their corresp<strong>on</strong>ding error is the experimental<br />
error. The error can be evaluated by the following<br />
expressi<strong>on</strong>:<br />
m<br />
2 2<br />
( ∑ ( x ˆ ) ( ˆ<br />
i<br />
− xi + yi − yi)<br />
i=<br />
1<br />
Qk<br />
=<br />
(6)<br />
m<br />
where , ( xi, y<br />
i)<br />
, ( i = 1,2, , m)<br />
is the real world<br />
coordinate of the marked point, ( xˆ, y ˆ)<br />
, ( i = 1,2, , m)<br />
is<br />
the computed world coordinate by calibrati<strong>on</strong> method,<br />
m is the number of marked points.<br />
The experimental results can be seen from table 1.<br />
The overall error of world coordinates is:<br />
Figure 3. Marked points image<br />
Figure 4. Extracted centroid of marked points<br />
367













