ROSTA OSCILLATING MOUNTINGS - Jens S Transmisjoner
ROSTA OSCILLATING MOUNTINGS - Jens S Transmisjoner
ROSTA OSCILLATING MOUNTINGS - Jens S Transmisjoner

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
<strong>ROSTA</strong><br />
Technology<br />
3. Terminology and Calculation (Crank Shaft Driven Systems)<br />
3.1. Terminology<br />
Symbol Unit Term<br />
a m/s 2 Acceleration<br />
A mm Center distance rockers<br />
c d N/mm Dynamic spring value (rocker)<br />
c t N/mm Total spring value (system)<br />
f e Hz Natural frequency (elements)<br />
f err Hz Excitation frequency<br />
F N Force<br />
g 9.81m/s 2 Gravitational acceleration<br />
K<br />
machine acc.<br />
grav. acc.<br />
Oscillating machine factor<br />
Symbol Unit Term<br />
m kg Mass<br />
n err min –1 Revolutions per minute<br />
R mm Crank radius<br />
S – Center of gravity<br />
sw = 2 · R mm Throw (peak to peak)<br />
v th<br />
m/min cm/s Theoretical velocity (material)<br />
z – Quantity (number)<br />
W % Degree of isolation<br />
α ° Oscillation angle<br />
β ° Rocker angle (inclination)<br />
3.2. Calculation<br />
Formulas for calculating oscillating machines based on the fundamental knowledges about oscillation theories.<br />
Total spring value (system)<br />
Exitation frequency<br />
c t = m · ( 2π · n err ) 2 · 0.001<br />
60<br />
f err = 1 c ·<br />
t · 1000<br />
2π<br />
m<br />
[N/mm]<br />
[Hz]<br />
Oscillating Mountings<br />
Number of rockers for resonance operation<br />
Oscillating machine factor (g-factor of acceleration)<br />
Acceleration force<br />
c t<br />
z =<br />
0.9 · c d<br />
K = (2π · n err ) 2<br />
60<br />
·R<br />
9810<br />
F = K · m · g<br />
[piece]<br />
[–]<br />
[N]<br />
Required driving power (approximation)<br />
P ≈ R · K · m · g · nerr<br />
9550 · 1000 · 2<br />
[kW]<br />
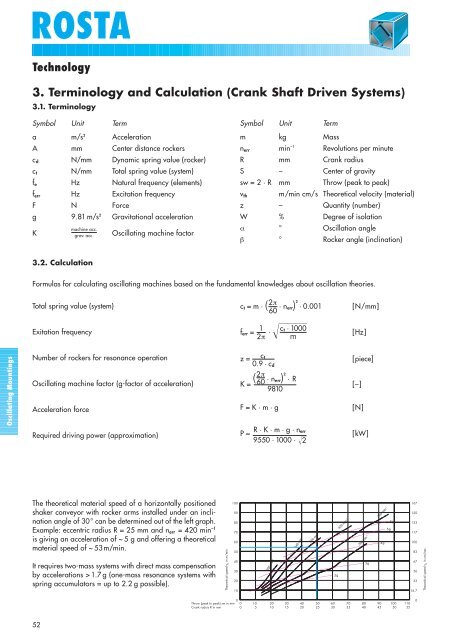
The theoretical material speed of a horizontally positioned<br />
shaker conveyor with rocker arms installed under an inclination<br />
angle of 30° can be determined out of the left graph.<br />
Example: eccentric radius R = 25 mm and n err = 420 min –1<br />
is giving an acceleration of ~ 5 g and offering a theoretical<br />
material speed of ~ 53 m/min.<br />
It requires two-mass systems with direct mass compensation<br />
by accelerations > 1.7 g (one-mass resonance systems with<br />
spring accumulators = up to 2.2 g possible).<br />
Theoretical speed v th in m/min<br />
100<br />
90<br />
80<br />
70<br />
60<br />
50<br />
40<br />
30<br />
20<br />
10<br />
600 min -1<br />
-1<br />
540 min<br />
-1<br />
480 min<br />
2g<br />
-1<br />
420 min<br />
-1 360 min<br />
300 min -1<br />
4g<br />
3g<br />
6g<br />
5g<br />
167<br />
150<br />
133<br />
117<br />
100<br />
83<br />
67<br />
50<br />
33<br />
16.7<br />
Theoretical speed v th in cm/sec<br />
Throw (peak to peak) sw in mm<br />
Crank raduis R in mm<br />
0<br />
0<br />
0<br />
10<br />
5<br />
20<br />
10<br />
30<br />
15<br />
40<br />
20<br />
50<br />
25<br />
60<br />
30<br />
70<br />
35<br />
80<br />
40<br />
90<br />
45<br />
100<br />
50<br />
110<br />
55<br />
0<br />
52