
You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
4 Chapter # • Chapter Title<br />
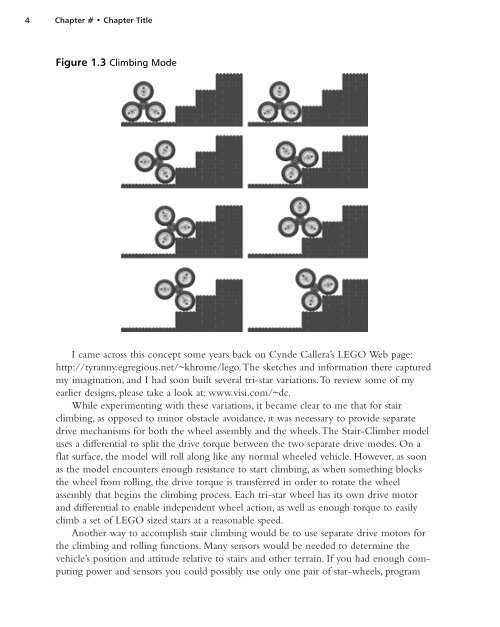
Figure 1.3 Climbing Mode<br />
I came across this concept some years back on Cynde Callera’s LEGO Web page:<br />
http://tyranny.egregious.net/~khrome/lego.The sketches and information there captured<br />
my imagination, and I had soon built several tri-star variations.To review some of my<br />
earlier designs, please take a look at: www.visi.com/~dc.<br />
While experimenting with these variations, it became clear to me that for stair<br />
climbing, as opposed to minor obstacle avoidance, it was necessary to provide separate<br />
drive mechanisms for both the wheel assembly and the wheels.The <strong>Stair</strong>-<strong>Climber</strong> model<br />
uses a differential to split the drive torque between the two separate drive modes. On a<br />
flat surface, the model will roll along like any normal wheeled vehicle. However, as soon<br />
as the model encounters enough resistance to start climbing, as when something blocks<br />
the wheel from rolling, the drive torque is transferred in order to rotate the wheel<br />
assembly that begins the climbing process. Each tri-star wheel has its own drive motor<br />
and differential to enable independent wheel action, as well as enough torque to easily<br />
climb a set of LEGO sized stairs at a reasonable speed.<br />
Another way to accomplish stair climbing would be to use separate drive motors for<br />
the climbing and rolling functions. Many sensors would be needed to determine the<br />
vehicle’s position and attitude relative to stairs and other terrain. If you had enough computing<br />
power and sensors you could possibly use only one pair of star-wheels, program