
You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
6 Chapter 1 • <strong>Stair</strong>-<strong>Climber</strong><br />
Engineering Trade-Offs<br />
So, by now you may be wondering where is the RCX? Well, as much fun as it would be<br />
to make this model autonomous by adding a few sensors and RCX, it really isn’t practical.<br />
All the extra weight is just too much for the tri-star assemblies of this model to<br />
function properly. When attempting to climb with higher loads, the excessive torque on<br />
the main tri-star axles leads to breaking axles and gears with higher loads.<br />
Beyond this, the main goal of this model was stair climbing and attaching an RCX to the<br />
model would raise the center of gravity (CG) enough to seriously limit vehicle stability,<br />
thus causing the model to flip over backwards when climbing steeper inclines.<br />
However, you could use an RCX as a handheld battery pack if you wanted to, and I<br />
will show you how this is possible toward the end of the chapter. But then again, the<br />
<strong>Stair</strong>-<strong>Climber</strong> doesn’t need the processing power, as it uses the differentials to shift<br />
between modes.There is one more reason for just using a battery pack with this particular<br />
model: if you try to turn this model by powering each side separately, you may find<br />
the wheels will slide out of place and jam.<br />
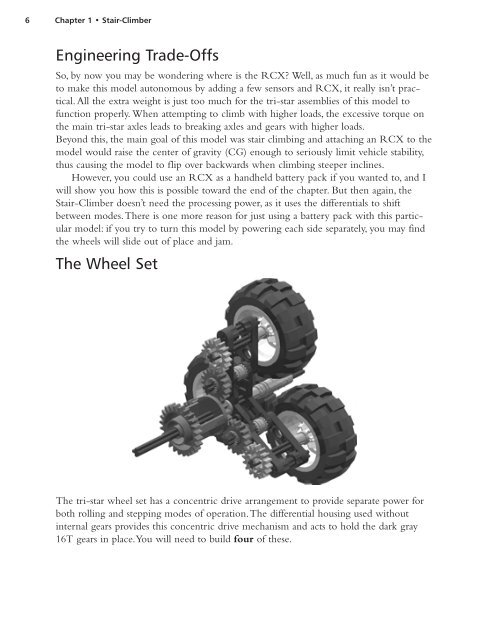
The Wheel Set<br />
The tri-star wheel set has a concentric drive arrangement to provide separate power for<br />
both rolling and stepping modes of operation.The differential housing used without<br />
internal gears provides this concentric drive mechanism and acts to hold the dark gray<br />
16T gears in place.You will need to build four of these.