

Chapter 4: Geometry
Chapter 4: Geometry
Chapter 4: Geometry

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
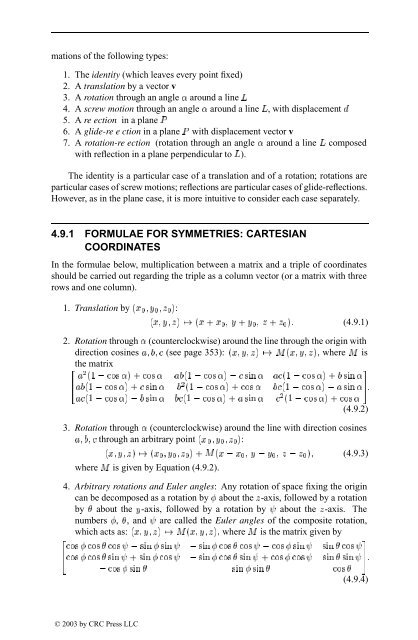
mations of the following types:<br />
1. The identity (which leaves every point fixed)<br />
2. A translation by a vector v<br />
3. A rotation through an angle « around a line Ä<br />
4. A screw motion through an angle « around a line Ä, with displacement <br />
5. A re ection in a plane È<br />
6. A glide-re e ction in a plane È with displacement vector v<br />
7. A rotation-re ection (rotation through an angle « around a line Ä composed<br />
with reflection in a plane perpendicular to Ä).<br />
The identity is a particular case of a translation and of a rotation; rotations are<br />
particular cases of screw motions; reflections are particular cases of glide-reflections.<br />
However, as in the plane case, it is more intuitive to consider each case separately.<br />
4.9.1 FORMULAE FOR SYMMETRIES: CARTESIAN<br />
COORDINATES<br />
In the formulae below, multiplication between a matrix and a triple of coordinates<br />
should be carried out regarding the triple as a column vector (or a matrix with three<br />
rows and one column).<br />
1. Translation by ´Ü ¼ Ý ¼ Þ ¼ µ:<br />
´Ü Ý Þµ ´Ü · Ü ¼ Ý· Ý ¼ Þ· Þ ¼ µ (4.9.1)<br />
2. Rotation through « (counterclockwise) around the line through the origin with<br />
direction cosines (see page 353): ´Ü Ý Þµ Å ´Ü Ý Þµ where Å is<br />
¾the matrix<br />
¿<br />
¾´½ Ó× «µ ·Ó׫ ´½ Ó× «µ ×Ò « ´½ Ó× «µ · ×Ò «<br />
´½ Ó× «µ · ×Ò « ¾´½ Ó× «µ · Ó× « ´½ Ó× «µ ×Ò « <br />
´½ Ó× «µ ×Ò « ´½ Ó× «µ · ×Ò « ¾´½ Ó× «µ · Ó× «<br />
(4.9.2)<br />
3. Rotation through « (counterclockwise) around the line with direction cosines<br />
through an arbitrary point ´Ü ¼ Ý ¼ Þ ¼ µ:<br />
´Ü Ý Þµ ´Ü ¼ Ý ¼ Þ ¼ µ·Å ´Ü Ü ¼ Ý Ý ¼ Þ Þ ¼ µ (4.9.3)<br />
where Å is given by Equation (4.9.2).<br />
4. Arbitrary rotations and Euler angles: Any rotation of space fixing the origin<br />
can be decomposed as a rotation by about the Þ-axis, followed by a rotation<br />
by about the Ý-axis, followed by a rotation by about the Þ-axis. The<br />
numbers , , and are called the Euler angles of the composite rotation,<br />
which acts as: ´Ü Ý Þµ Å ´Ü Ý Þµ where Å is the matrix given by<br />
¾<br />
<br />
Ó× Ó× Ó× ×Ò ×Ò ×Ò Ó× Ó× Ó× ×Ò ×Ò Ó× <br />
Ó× Ó× ×Ò ·×Ò Ó× ×Ò Ó× ×Ò · Ó× Ó× ×Ò ×Ò <br />
Ó× ×Ò ×Ò ×Ò Ó× <br />
(4.9.4)<br />
¿<br />
© 2003 by CRC Press LLC







