Geometric theory of defects in solids
Geometric theory of defects in solids
Geometric theory of defects in solids

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
R<br />
i<br />
3<br />
i<br />
x , y i=<br />
1,2,3<br />
δ<br />
u<br />
ε<br />
σ<br />
ij<br />
i<br />
( x)<br />
= ( ∂ u +∂ u )<br />
1<br />
ij 2 i j j i<br />
ij<br />
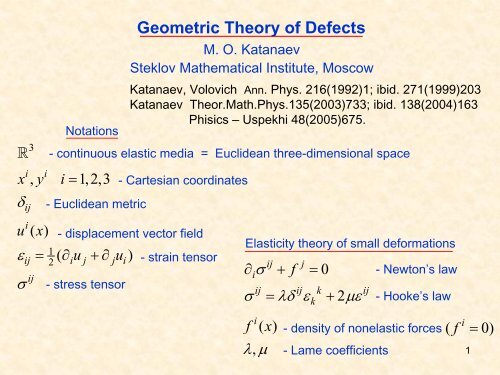
Notations<br />
<strong>Geometric</strong> Theory <strong>of</strong> Defects<br />
M. O. Katanaev<br />
Steklov Mathematical Institute, Moscow<br />
Katanaev, Volovich Ann. Phys. 216(1992)1; ibid. 271(1999)203<br />
Katanaev Theor.Math.Phys.135(2003)733; ibid. 138(2004)163<br />
Phisics – Uspekhi 48(2005)675.<br />
- cont<strong>in</strong>uous elastic media = Euclidean three-dimensional space<br />
- Euclidean metric<br />
- Cartesian coord<strong>in</strong>ates<br />
- displacement vector field<br />
- stress tensor<br />
- stra<strong>in</strong> tensor<br />
Elasticity <strong>theory</strong> <strong>of</strong> small deformations<br />
i<br />
ij<br />
∂ σ + f =<br />
j<br />
0<br />
ij ij k ij<br />
k<br />
σ = λδ ε + 2με<br />
- Newton’s law<br />
- Hooke’s law<br />
f<br />
i<br />
( x)<br />
λ,<br />
μ<br />
- density <strong>of</strong> nonelastic forces<br />
- Lame coefficients<br />
i<br />
( f = 0)<br />
1
Differential geometry <strong>of</strong> elastic deformations<br />
y<br />
x<br />
i i i<br />
x = y + u ( x)<br />
i<br />
y → x ( y)<br />
i<br />
- diffeomorphism:<br />
R<br />
i<br />
y<br />
δ<br />
3 3<br />
ij<br />
→ <br />
x<br />
g<br />
i<br />
ij<br />
k<br />
l<br />
∂y<br />
∂y<br />
gij ( x) = kl ij iuj jui ij 2<br />
i j<br />
ij<br />
x x δ ≈ δ −∂ −∂ = δ − ε<br />
∂ ∂<br />
1<br />
Γ <br />
ijk = ( ∂ ) 0<br />
2 ig jk +∂ jgik −∂k gij<br />
≠<br />
- Christ<strong>of</strong>fel’s symbols<br />
- <strong>in</strong>duced metric<br />
l l m l<br />
R = ∂Γ −Γ Γ<br />
−( i↔ j)<br />
= 0<br />
ijk i jk ik jm<br />
- curvature tensor<br />
x<br />
i i j<br />
jk<br />
=−Γ <br />
x x<br />
- extremals (geodesics)<br />
k<br />
k k k<br />
T = Γ<br />
−Γ = 0<br />
ij ij ji<br />
- torsion tensor<br />
2
Dislocations<br />
L<strong>in</strong>ear <strong>defects</strong>:<br />
2<br />
x<br />
2<br />
x<br />
3<br />
1<br />
x<br />
x<br />
Edge dislocation<br />
b<br />
3<br />
x<br />
b<br />
1<br />
x<br />
Screw dislocation<br />
b<br />
- Burgers vector<br />
Po<strong>in</strong>t <strong>defects</strong>:<br />
Vacancy<br />
i<br />
u<br />
( x)<br />
⎧<br />
⎨<br />
⎩<br />
is cont<strong>in</strong>uous = elastic deformations<br />
is not cont<strong>in</strong>uous = dislocations<br />
3
C<br />
(*) ⇒<br />
2<br />
x<br />
∫<br />
b<br />
1<br />
x<br />
∫∫<br />
Edge dislocation<br />
∫<br />
C<br />
μ<br />
i μ i i<br />
μ<br />
C<br />
dx ∂ u =− dx ∂ y =−b<br />
μ<br />
x μ , μ = 1,2, 3<br />
i<br />
y<br />
( x)<br />
i i i<br />
b = dx μ e = dx μ ∧ dx ν ( ∂ e −∂ e i )<br />
μ μ ν ν μ<br />
C<br />
S<br />
i i ij<br />
μν =∂μ ν −ωμ ν j −( μ ↔ν)<br />
- torsion<br />
T e e<br />
R<br />
ij ij ik j<br />
μν μ ν μ ν k<br />
e<br />
i<br />
μ<br />
( x)<br />
i<br />
⎧∂ ⎪ μ y<br />
= ⎨<br />
⎪⎩ lim∂<br />
=∂ ω −ω ω −( μ ↔ν)<br />
μ<br />
y<br />
∫<br />
- arbitrary curvil<strong>in</strong>ear coord<strong>in</strong>ates<br />
- is not cont<strong>in</strong>uous !<br />
i<br />
- outside the cut<br />
- on the cut<br />
-curvature<br />
- Burgers vector <strong>in</strong> elasticity<br />
ω<br />
ij<br />
μ<br />
=−ω<br />
ji<br />
μ<br />
(*)<br />
- triad field<br />
(cont<strong>in</strong>uous on the cut)<br />
SO(3)-connection<br />
i<br />
∫∫<br />
μ ν i<br />
μν<br />
b = dx ∧ dx T<br />
- def<strong>in</strong>ition <strong>of</strong> the Burgers vector<br />
<strong>in</strong> the geometric <strong>theory</strong><br />
Back to elasticity: if<br />
ij<br />
ij<br />
μ<br />
R μν = 0 then ω → 0<br />
4
Ferromagnets<br />
i<br />
Discl<strong>in</strong>ations<br />
n ( x)<br />
n0<br />
i j i<br />
- unit vector field - fixed unit vector<br />
n = n0 Sj<br />
( ω)<br />
j<br />
Si<br />
∈SO(3)<br />
ij ji<br />
ω =−ω<br />
∈so(3)<br />
1 jk<br />
ωi<br />
= εijkω<br />
2<br />
- orthogonal matrix<br />
i<br />
- Lie algebra element (sp<strong>in</strong> structure)<br />
- rotational angle<br />
( ε = 1)<br />
εijk<br />
- totally antisymmetric tensor 123<br />
2<br />
x<br />
Examples<br />
1<br />
x<br />
2<br />
x ij ij<br />
1<br />
x<br />
Ω =<br />
∫<br />
C<br />
Θ = ε<br />
i<br />
ijk<br />
dx μ ∂μω<br />
Ω<br />
jk<br />
- Frank vector<br />
(total angle <strong>of</strong> rotation)<br />
C<br />
C<br />
Θ = 2π<br />
Θ = 4π<br />
i<br />
Θ = ΘΘ i<br />
5
Model for a sp<strong>in</strong> structure:<br />
i<br />
ω ( x) ∈ so(3)<br />
- basic variable<br />
k j j<br />
j j ki<br />
i<br />
i<br />
S = cos + ωε<br />
s<strong>in</strong> + ωω<br />
i i (1 − cos ) ∈ SO(3),<br />
=<br />
2<br />
i<br />
δ ω ω ω ω ω ω<br />
ω ω<br />
l<br />
j 1 k j<br />
μi<br />
= ( ∂μS<br />
− ) i Sk<br />
- trivial SO(3)-connection (pure gauge)<br />
μ ij<br />
l μ<br />
∂ =<br />
0<br />
- pr<strong>in</strong>cipal chiral SO(3)-model<br />
6
Frank vector<br />
ij<br />
ω ( x)<br />
- is not cont<strong>in</strong>uous !<br />
ω<br />
ij<br />
μ<br />
( x)<br />
ij<br />
⎧∂ ⎪ μω<br />
= ⎨<br />
ij<br />
⎪⎩ lim∂μω<br />
- outside the cut<br />
- on the cut<br />
- SO(3)-connection<br />
(cont<strong>in</strong>uous on the cut)<br />
ij μ ij μ ν ij ij<br />
∫<br />
μ ∫∫<br />
μ ν ν μ<br />
Ω = dx ω = dx ∧ dx ( ∂ ω −∂ ω )<br />
ij ij ik j<br />
R μν μ ν μ ν k<br />
=∂ ω −ω ω −( μ ↔ν)<br />
- the Frank vector<br />
-curvature<br />
ij<br />
Ω =<br />
∫∫<br />
dx<br />
μ<br />
∧<br />
ν<br />
dx R<br />
ij<br />
μν<br />
- def<strong>in</strong>ition <strong>of</strong> the Frank vector<br />
<strong>in</strong> the geometric <strong>theory</strong><br />
Back to the sp<strong>in</strong> structure: if<br />
2<br />
n∈ then SO(3) → SO(2)<br />
7
Summary <strong>of</strong> the geometric approach<br />
(physical <strong>in</strong>terpretation)<br />
Media with dislocations and discl<strong>in</strong>ations =<br />
3<br />
with a given Riemann-Cartan geometry<br />
Independent variables<br />
=<br />
<br />
⎧<br />
i<br />
⎪<br />
⎨<br />
⎪⎩ ω<br />
e μ<br />
ij<br />
μ<br />
- triad field<br />
- SO(3)-connection<br />
i i ij<br />
μν μ ν μ ν j<br />
T =∂ e −ω e −( μ ↔ν)<br />
R<br />
ij ij ik j<br />
μν μ ν μ ν k<br />
=∂ ω −ω ω −( μ ↔ν)<br />
- torsion (surface density <strong>of</strong><br />
the Burgers vector)<br />
- curvature (surface density <strong>of</strong><br />
the Frank vector)<br />
Elastic deformations:<br />
R<br />
ij<br />
μν<br />
i<br />
μν<br />
= 0, T = 0<br />
Dislocations:<br />
R<br />
ij<br />
μν<br />
i<br />
μν<br />
= 0, T ≠ 0<br />
Discl<strong>in</strong>ations:<br />
R<br />
ij<br />
μν<br />
i<br />
μν<br />
≠ 0, T = 0<br />
Dislocations and discl<strong>in</strong>ations:<br />
R<br />
ij<br />
μν<br />
≠<br />
i<br />
μν<br />
0, T ≠ 0<br />
8
The free energy<br />
∫<br />
3<br />
S = d xeL, e=<br />
dete μ<br />
i<br />
1<br />
4<br />
1<br />
4<br />
ijk kij j ik<br />
1 2 3<br />
L= κR− T ( βT + β T + β T δ )<br />
ijk<br />
ijkl klij ik jl<br />
1 2 3<br />
+ R ( γ R + γ R + γ R δ ) +Λ<br />
ijkl<br />
k μ ν<br />
ij = i j<br />
i<br />
j = Tij<br />
T e e T<br />
T<br />
R<br />
ik<br />
R<br />
=<br />
=<br />
R<br />
R<br />
ijk<br />
i<br />
i<br />
Postulate:<br />
j<br />
k<br />
μν<br />
The result:<br />
,...<br />
- trace <strong>of</strong> torsion<br />
- Ricci tensor<br />
- scalar curvature<br />
equations <strong>of</strong> equilibrium<br />
admit solutions<br />
- transformation <strong>of</strong> <strong>in</strong>dices<br />
L= κR<br />
−γR R<br />
Re ()<br />
R<br />
[ ij]<br />
(, e ω)<br />
[ ij]<br />
⎧R= 0, T ≠ 0<br />
⎪<br />
⎨R<br />
≠ 0, T = 0<br />
⎪<br />
⎩R<br />
= 0, T = 0<br />
[ ij]<br />
κ, β , β , β<br />
1 2 3<br />
γ , γ , γ , Λ<br />
1 2 3<br />
- the Hilbert-E<strong>in</strong>ste<strong>in</strong> action<br />
- coupl<strong>in</strong>g constants<br />
- only dislocations<br />
- only discl<strong>in</strong>ations<br />
- elastic deformations<br />
- antisymmetric part <strong>of</strong> the Ricci tensor<br />
9
Elastic gauge<br />
(1− 2 σ ) Δ u +∂ ∂ u = 0<br />
e<br />
i i j<br />
σ =<br />
≈ δ<br />
j<br />
λ<br />
2( λ + μ)<br />
−∂<br />
μi<br />
μi<br />
μ<br />
u<br />
i<br />
- the elasticity equation<br />
- Poisson ratio<br />
- the l<strong>in</strong>ear approximation<br />
μ<br />
(1− 2 σ ) ∂ e +∂ e = 0<br />
μi<br />
i<br />
μ<br />
μ<br />
- the elastic gauge<br />
(fixes diffeomorphisms)<br />
Lorentz gauge<br />
μ ij<br />
ω μ<br />
∂ = 0<br />
- the Lorenz gauge<br />
(fixes SO(3)-<strong>in</strong>variance)<br />
If there are no discl<strong>in</strong>ations<br />
ij<br />
R μν =<br />
0, then<br />
j j −1<br />
ω ( )<br />
k j<br />
μ i = l μ i = ∂ μ S i Sk<br />
μ ij<br />
μ<br />
∂ l = 0 - pr<strong>in</strong>cipal chiral SO(3)-model<br />
pure gauge<br />
10
y<br />
Wedge dislocation <strong>in</strong> elasticity <strong>theory</strong><br />
R<br />
z<br />
−2πθ<br />
x<br />
r, ϕ,<br />
z<br />
ui<br />
- cyl<strong>in</strong>drical coord<strong>in</strong>ates<br />
{ u(),() r v r ϕ,0}<br />
= - displacement vector<br />
Boundary conditions:<br />
u | = 0, u | = 0, u | =−2 r, ∂ u | = 0<br />
r r= 0 ϕ ϕ= 0 ϕ ϕ= 2π πθ r r r=<br />
R<br />
vr ()<br />
u<br />
∂r( r∂ru)<br />
− = D - elasticity equations<br />
r<br />
1−<br />
2σ D =− θ , σ - Poisson ratio<br />
1 − σ<br />
D<br />
c2<br />
u = rln r+ cr 1 + , c1,2<br />
= const - a general solution<br />
2<br />
r<br />
2 ⎛ 1−2σ<br />
r ⎞ 2 2⎛ 1−2σ<br />
r 1 ⎞ 2<br />
dl = ⎜1+ θ ln ⎟dr + r ⎜1+ θ ln + θ ⎟dϕ<br />
⎝ 1−σ R⎠ ⎝ 1−σ R 1−σ<br />
⎠<br />
<strong>in</strong>duced metric θ 1, r ∼ R<br />
= −θ r<br />
θ - deficit angle<br />
11
Wedge dislocation <strong>in</strong> the geometric <strong>theory</strong><br />
R<br />
y<br />
x<br />
−2πθ<br />
θ<br />
- deficit angle<br />
α = 1+<br />
θ<br />
2 1 2 2 2<br />
dl = df + f dϕ - metric for a conical s<strong>in</strong>gularity<br />
2<br />
α<br />
(exact solution <strong>of</strong> 3D E<strong>in</strong>ste<strong>in</strong> eqs.)<br />
Where is the Poisson ratio σ ???<br />
The elastic gauge:<br />
μ<br />
(1− 2 σ ) ∂ e +∂ e = 0<br />
μi<br />
i<br />
μ<br />
μ<br />
e<br />
i<br />
μ<br />
=∂<br />
u<br />
i<br />
For it reduces to elasticity equations:<br />
μ<br />
(1− 2 σ ) Δ u +∂ ∂ u = 0<br />
i i j<br />
j<br />
2( n 1) 2 2<br />
2 ⎛ r ⎞<br />
− ⎛<br />
2 α r 2⎞<br />
dl = ⎜ ⎟ ⎜dr + dϕ<br />
2 ⎟<br />
⎝R<br />
⎠ ⎝ n ⎠<br />
- exact solution <strong>of</strong> the E<strong>in</strong>ste<strong>in</strong><br />
equations <strong>in</strong> the elastic gauge<br />
n<br />
=<br />
2 2 2<br />
− θσ + θ σ + 4(1 + θ)(1 −σ)<br />
2(1 −σ<br />
)<br />
12
Comparison <strong>of</strong> the elasticity <strong>theory</strong><br />
with the geometric model<br />
2( n 1) 2 2<br />
2 ⎛ r ⎞<br />
− 2 α r 2<br />
dl = ⎛ dr dϕ<br />
⎞<br />
⎜ ⎟ ⎜ +<br />
2 ⎟<br />
⎝R<br />
⎠ ⎝ n ⎠<br />
- the geometric model<br />
1−<br />
2σ<br />
θ 1, n ≈ 1 + θ<br />
2(1 −σ<br />
)<br />
2 ⎛ 1−2σ<br />
r ⎞ 2 2⎛ 1−2σ<br />
r 1 ⎞ 2<br />
dl = ⎜1+ θ ln ⎟dr + r ⎜1+ θ ln + θ ⎟dϕ<br />
⎝ 1−σ R⎠ ⎝ 1−σ R 1−σ<br />
⎠<br />
- the elasticity<br />
<strong>theory</strong><br />
The result <strong>of</strong> the elasticity <strong>theory</strong> is valid only for small<br />
deficit angles and near the boundary<br />
θ 1<br />
r ∼ R<br />
The result <strong>of</strong> the geometric model is valid for allθ<br />
and everywhere<br />
lnduced metric components def<strong>in</strong>e the deformation<br />
tensor and can be measured experimentally<br />
13
Conclusion<br />
<strong>Geometric</strong> <strong>theory</strong> <strong>of</strong> <strong>defects</strong><br />
? ? ? ? ?<br />
Elastic gauge<br />
Lorenz gauge<br />
Elasticity <strong>theory</strong><br />
Pr<strong>in</strong>cipal chiral SO(3)-model<br />
1) The geometric <strong>theory</strong> <strong>of</strong> <strong>defects</strong> <strong>in</strong> <strong>solids</strong> appears to be<br />
a fundamental <strong>theory</strong> <strong>of</strong> <strong>defects</strong>.<br />
2) It describes s<strong>in</strong>gle <strong>defects</strong> as well as cont<strong>in</strong>uous distribution<br />
<strong>of</strong> <strong>defects</strong>.<br />
3) It provides a unified treatment <strong>of</strong> <strong>defects</strong> <strong>in</strong> media (dislocations)<br />
and <strong>in</strong> sp<strong>in</strong> structures (discl<strong>in</strong>ations).<br />
4) In the absence <strong>of</strong> <strong>defects</strong> it reduces to the elasticity <strong>theory</strong><br />
for the displacement vector field and to the pr<strong>in</strong>cipal chiral<br />
SO(3)-model for sp<strong>in</strong> structures.<br />
14