Geometric theory of defects in solids
Geometric theory of defects in solids
Geometric theory of defects in solids

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
R<br />
i<br />
3<br />
i<br />
x , y i=<br />
1,2,3<br />
δ<br />
u<br />
ε<br />
σ<br />
ij<br />
i<br />
( x)<br />
= ( ∂ u +∂ u )<br />
1<br />
ij 2 i j j i<br />
ij<br />
Notations<br />
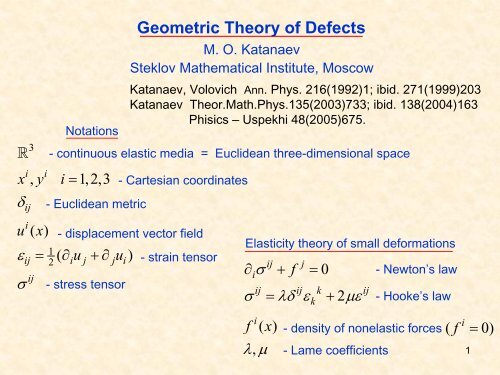
<strong>Geometric</strong> Theory <strong>of</strong> Defects<br />
M. O. Katanaev<br />
Steklov Mathematical Institute, Moscow<br />
Katanaev, Volovich Ann. Phys. 216(1992)1; ibid. 271(1999)203<br />
Katanaev Theor.Math.Phys.135(2003)733; ibid. 138(2004)163<br />
Phisics – Uspekhi 48(2005)675.<br />
- cont<strong>in</strong>uous elastic media = Euclidean three-dimensional space<br />
- Euclidean metric<br />
- Cartesian coord<strong>in</strong>ates<br />
- displacement vector field<br />
- stress tensor<br />
- stra<strong>in</strong> tensor<br />
Elasticity <strong>theory</strong> <strong>of</strong> small deformations<br />
i<br />
ij<br />
∂ σ + f =<br />
j<br />
0<br />
ij ij k ij<br />
k<br />
σ = λδ ε + 2με<br />
- Newton’s law<br />
- Hooke’s law<br />
f<br />
i<br />
( x)<br />
λ,<br />
μ<br />
- density <strong>of</strong> nonelastic forces<br />
- Lame coefficients<br />
i<br />
( f = 0)<br />
1
Differential geometry <strong>of</strong> elastic deformations<br />
y<br />
x<br />
i i i<br />
x = y + u ( x)<br />
i<br />
y → x ( y)<br />
i<br />
- diffeomorphism:<br />
R<br />
i<br />
y<br />
δ<br />
3 3<br />
ij<br />
→ <br />
x<br />
g<br />
i<br />
ij<br />
k<br />
l<br />
∂y<br />
∂y<br />
gij ( x) = kl ij iuj jui ij 2<br />
i j<br />
ij<br />
x x δ ≈ δ −∂ −∂ = δ − ε<br />
∂ ∂<br />
1<br />
Γ <br />
ijk = ( ∂ ) 0<br />
2 ig jk +∂ jgik −∂k gij<br />
≠<br />
- Christ<strong>of</strong>fel’s symbols<br />
- <strong>in</strong>duced metric<br />
l l m l<br />
R = ∂Γ −Γ Γ<br />
−( i↔ j)<br />
= 0<br />
ijk i jk ik jm<br />
- curvature tensor<br />
x<br />
i i j<br />
jk<br />
=−Γ <br />
x x<br />
- extremals (geodesics)<br />
k<br />
k k k<br />
T = Γ<br />
−Γ = 0<br />
ij ij ji<br />
- torsion tensor<br />
2
Dislocations<br />
L<strong>in</strong>ear <strong>defects</strong>:<br />
2<br />
x<br />
2<br />
x<br />
3<br />
1<br />
x<br />
x<br />
Edge dislocation<br />
b<br />
3<br />
x<br />
b<br />
1<br />
x<br />
Screw dislocation<br />
b<br />
- Burgers vector<br />
Po<strong>in</strong>t <strong>defects</strong>:<br />
Vacancy<br />
i<br />
u<br />
( x)<br />
⎧<br />
⎨<br />
⎩<br />
is cont<strong>in</strong>uous = elastic deformations<br />
is not cont<strong>in</strong>uous = dislocations<br />
3
C<br />
(*) ⇒<br />
2<br />
x<br />
∫<br />
b<br />
1<br />
x<br />
∫∫<br />
Edge dislocation<br />
∫<br />
C<br />
μ<br />
i μ i i<br />
μ<br />
C<br />
dx ∂ u =− dx ∂ y =−b<br />
μ<br />
x μ , μ = 1,2, 3<br />
i<br />
y<br />
( x)<br />
i i i<br />
b = dx μ e = dx μ ∧ dx ν ( ∂ e −∂ e i )<br />
μ μ ν ν μ<br />
C<br />
S<br />
i i ij<br />
μν =∂μ ν −ωμ ν j −( μ ↔ν)<br />
- torsion<br />
T e e<br />
R<br />
ij ij ik j<br />
μν μ ν μ ν k<br />
e<br />
i<br />
μ<br />
( x)<br />
i<br />
⎧∂ ⎪ μ y<br />
= ⎨<br />
⎪⎩ lim∂<br />
=∂ ω −ω ω −( μ ↔ν)<br />
μ<br />
y<br />
∫<br />
- arbitrary curvil<strong>in</strong>ear coord<strong>in</strong>ates<br />
- is not cont<strong>in</strong>uous !<br />
i<br />
- outside the cut<br />
- on the cut<br />
-curvature<br />
- Burgers vector <strong>in</strong> elasticity<br />
ω<br />
ij<br />
μ<br />
=−ω<br />
ji<br />
μ<br />
(*)<br />
- triad field<br />
(cont<strong>in</strong>uous on the cut)<br />
SO(3)-connection<br />
i<br />
∫∫<br />
μ ν i<br />
μν<br />
b = dx ∧ dx T<br />
- def<strong>in</strong>ition <strong>of</strong> the Burgers vector<br />
<strong>in</strong> the geometric <strong>theory</strong><br />
Back to elasticity: if<br />
ij<br />
ij<br />
μ<br />
R μν = 0 then ω → 0<br />
4
Ferromagnets<br />
i<br />
Discl<strong>in</strong>ations<br />
n ( x)<br />
n0<br />
i j i<br />
- unit vector field - fixed unit vector<br />
n = n0 Sj<br />
( ω)<br />
j<br />
Si<br />
∈SO(3)<br />
ij ji<br />
ω =−ω<br />
∈so(3)<br />
1 jk<br />
ωi<br />
= εijkω<br />
2<br />
- orthogonal matrix<br />
i<br />
- Lie algebra element (sp<strong>in</strong> structure)<br />
- rotational angle<br />
( ε = 1)<br />
εijk<br />
- totally antisymmetric tensor 123<br />
2<br />
x<br />
Examples<br />
1<br />
x<br />
2<br />
x ij ij<br />
1<br />
x<br />
Ω =<br />
∫<br />
C<br />
Θ = ε<br />
i<br />
ijk<br />
dx μ ∂μω<br />
Ω<br />
jk<br />
- Frank vector<br />
(total angle <strong>of</strong> rotation)<br />
C<br />
C<br />
Θ = 2π<br />
Θ = 4π<br />
i<br />
Θ = ΘΘ i<br />
5
Model for a sp<strong>in</strong> structure:<br />
i<br />
ω ( x) ∈ so(3)<br />
- basic variable<br />
k j j<br />
j j ki<br />
i<br />
i<br />
S = cos + ωε<br />
s<strong>in</strong> + ωω<br />
i i (1 − cos ) ∈ SO(3),<br />
=<br />
2<br />
i<br />
δ ω ω ω ω ω ω<br />
ω ω<br />
l<br />
j 1 k j<br />
μi<br />
= ( ∂μS<br />
− ) i Sk<br />
- trivial SO(3)-connection (pure gauge)<br />
μ ij<br />
l μ<br />
∂ =<br />
0<br />
- pr<strong>in</strong>cipal chiral SO(3)-model<br />
6
Frank vector<br />
ij<br />
ω ( x)<br />
- is not cont<strong>in</strong>uous !<br />
ω<br />
ij<br />
μ<br />
( x)<br />
ij<br />
⎧∂ ⎪ μω<br />
= ⎨<br />
ij<br />
⎪⎩ lim∂μω<br />
- outside the cut<br />
- on the cut<br />
- SO(3)-connection<br />
(cont<strong>in</strong>uous on the cut)<br />
ij μ ij μ ν ij ij<br />
∫<br />
μ ∫∫<br />
μ ν ν μ<br />
Ω = dx ω = dx ∧ dx ( ∂ ω −∂ ω )<br />
ij ij ik j<br />
R μν μ ν μ ν k<br />
=∂ ω −ω ω −( μ ↔ν)<br />
- the Frank vector<br />
-curvature<br />
ij<br />
Ω =<br />
∫∫<br />
dx<br />
μ<br />
∧<br />
ν<br />
dx R<br />
ij<br />
μν<br />
- def<strong>in</strong>ition <strong>of</strong> the Frank vector<br />
<strong>in</strong> the geometric <strong>theory</strong><br />
Back to the sp<strong>in</strong> structure: if<br />
2<br />
n∈ then SO(3) → SO(2)<br />
7
Summary <strong>of</strong> the geometric approach<br />
(physical <strong>in</strong>terpretation)<br />
Media with dislocations and discl<strong>in</strong>ations =<br />
3<br />
with a given Riemann-Cartan geometry<br />
Independent variables<br />
=<br />
<br />
⎧<br />
i<br />
⎪<br />
⎨<br />
⎪⎩ ω<br />
e μ<br />
ij<br />
μ<br />
- triad field<br />
- SO(3)-connection<br />
i i ij<br />
μν μ ν μ ν j<br />
T =∂ e −ω e −( μ ↔ν)<br />
R<br />
ij ij ik j<br />
μν μ ν μ ν k<br />
=∂ ω −ω ω −( μ ↔ν)<br />
- torsion (surface density <strong>of</strong><br />
the Burgers vector)<br />
- curvature (surface density <strong>of</strong><br />
the Frank vector)<br />
Elastic deformations:<br />
R<br />
ij<br />
μν<br />
i<br />
μν<br />
= 0, T = 0<br />
Dislocations:<br />
R<br />
ij<br />
μν<br />
i<br />
μν<br />
= 0, T ≠ 0<br />
Discl<strong>in</strong>ations:<br />
R<br />
ij<br />
μν<br />
i<br />
μν<br />
≠ 0, T = 0<br />
Dislocations and discl<strong>in</strong>ations:<br />
R<br />
ij<br />
μν<br />
≠<br />
i<br />
μν<br />
0, T ≠ 0<br />
8
The free energy<br />
∫<br />
3<br />
S = d xeL, e=<br />
dete μ<br />
i<br />
1<br />
4<br />
1<br />
4<br />
ijk kij j ik<br />
1 2 3<br />
L= κR− T ( βT + β T + β T δ )<br />
ijk<br />
ijkl klij ik jl<br />
1 2 3<br />
+ R ( γ R + γ R + γ R δ ) +Λ<br />
ijkl<br />
k μ ν<br />
ij = i j<br />
i<br />
j = Tij<br />
T e e T<br />
T<br />
R<br />
ik<br />
R<br />
=<br />
=<br />
R<br />
R<br />
ijk<br />
i<br />
i<br />
Postulate:<br />
j<br />
k<br />
μν<br />
The result:<br />
,...<br />
- trace <strong>of</strong> torsion<br />
- Ricci tensor<br />
- scalar curvature<br />
equations <strong>of</strong> equilibrium<br />
admit solutions<br />
- transformation <strong>of</strong> <strong>in</strong>dices<br />
L= κR<br />
−γR R<br />
Re ()<br />
R<br />
[ ij]<br />
(, e ω)<br />
[ ij]<br />
⎧R= 0, T ≠ 0<br />
⎪<br />
⎨R<br />
≠ 0, T = 0<br />
⎪<br />
⎩R<br />
= 0, T = 0<br />
[ ij]<br />
κ, β , β , β<br />
1 2 3<br />
γ , γ , γ , Λ<br />
1 2 3<br />
- the Hilbert-E<strong>in</strong>ste<strong>in</strong> action<br />
- coupl<strong>in</strong>g constants<br />
- only dislocations<br />
- only discl<strong>in</strong>ations<br />
- elastic deformations<br />
- antisymmetric part <strong>of</strong> the Ricci tensor<br />
9
Elastic gauge<br />
(1− 2 σ ) Δ u +∂ ∂ u = 0<br />
e<br />
i i j<br />
σ =<br />
≈ δ<br />
j<br />
λ<br />
2( λ + μ)<br />
−∂<br />
μi<br />
μi<br />
μ<br />
u<br />
i<br />
- the elasticity equation<br />
- Poisson ratio<br />
- the l<strong>in</strong>ear approximation<br />
μ<br />
(1− 2 σ ) ∂ e +∂ e = 0<br />
μi<br />
i<br />
μ<br />
μ<br />
- the elastic gauge<br />
(fixes diffeomorphisms)<br />
Lorentz gauge<br />
μ ij<br />
ω μ<br />
∂ = 0<br />
- the Lorenz gauge<br />
(fixes SO(3)-<strong>in</strong>variance)<br />
If there are no discl<strong>in</strong>ations<br />
ij<br />
R μν =<br />
0, then<br />
j j −1<br />
ω ( )<br />
k j<br />
μ i = l μ i = ∂ μ S i Sk<br />
μ ij<br />
μ<br />
∂ l = 0 - pr<strong>in</strong>cipal chiral SO(3)-model<br />
pure gauge<br />
10
y<br />
Wedge dislocation <strong>in</strong> elasticity <strong>theory</strong><br />
R<br />
z<br />
−2πθ<br />
x<br />
r, ϕ,<br />
z<br />
ui<br />
- cyl<strong>in</strong>drical coord<strong>in</strong>ates<br />
{ u(),() r v r ϕ,0}<br />
= - displacement vector<br />
Boundary conditions:<br />
u | = 0, u | = 0, u | =−2 r, ∂ u | = 0<br />
r r= 0 ϕ ϕ= 0 ϕ ϕ= 2π πθ r r r=<br />
R<br />
vr ()<br />
u<br />
∂r( r∂ru)<br />
− = D - elasticity equations<br />
r<br />
1−<br />
2σ D =− θ , σ - Poisson ratio<br />
1 − σ<br />
D<br />
c2<br />
u = rln r+ cr 1 + , c1,2<br />
= const - a general solution<br />
2<br />
r<br />
2 ⎛ 1−2σ<br />
r ⎞ 2 2⎛ 1−2σ<br />
r 1 ⎞ 2<br />
dl = ⎜1+ θ ln ⎟dr + r ⎜1+ θ ln + θ ⎟dϕ<br />
⎝ 1−σ R⎠ ⎝ 1−σ R 1−σ<br />
⎠<br />
<strong>in</strong>duced metric θ 1, r ∼ R<br />
= −θ r<br />
θ - deficit angle<br />
11
Wedge dislocation <strong>in</strong> the geometric <strong>theory</strong><br />
R<br />
y<br />
x<br />
−2πθ<br />
θ<br />
- deficit angle<br />
α = 1+<br />
θ<br />
2 1 2 2 2<br />
dl = df + f dϕ - metric for a conical s<strong>in</strong>gularity<br />
2<br />
α<br />
(exact solution <strong>of</strong> 3D E<strong>in</strong>ste<strong>in</strong> eqs.)<br />
Where is the Poisson ratio σ ???<br />
The elastic gauge:<br />
μ<br />
(1− 2 σ ) ∂ e +∂ e = 0<br />
μi<br />
i<br />
μ<br />
μ<br />
e<br />
i<br />
μ<br />
=∂<br />
u<br />
i<br />
For it reduces to elasticity equations:<br />
μ<br />
(1− 2 σ ) Δ u +∂ ∂ u = 0<br />
i i j<br />
j<br />
2( n 1) 2 2<br />
2 ⎛ r ⎞<br />
− ⎛<br />
2 α r 2⎞<br />
dl = ⎜ ⎟ ⎜dr + dϕ<br />
2 ⎟<br />
⎝R<br />
⎠ ⎝ n ⎠<br />
- exact solution <strong>of</strong> the E<strong>in</strong>ste<strong>in</strong><br />
equations <strong>in</strong> the elastic gauge<br />
n<br />
=<br />
2 2 2<br />
− θσ + θ σ + 4(1 + θ)(1 −σ)<br />
2(1 −σ<br />
)<br />
12
Comparison <strong>of</strong> the elasticity <strong>theory</strong><br />
with the geometric model<br />
2( n 1) 2 2<br />
2 ⎛ r ⎞<br />
− 2 α r 2<br />
dl = ⎛ dr dϕ<br />
⎞<br />
⎜ ⎟ ⎜ +<br />
2 ⎟<br />
⎝R<br />
⎠ ⎝ n ⎠<br />
- the geometric model<br />
1−<br />
2σ<br />
θ 1, n ≈ 1 + θ<br />
2(1 −σ<br />
)<br />
2 ⎛ 1−2σ<br />
r ⎞ 2 2⎛ 1−2σ<br />
r 1 ⎞ 2<br />
dl = ⎜1+ θ ln ⎟dr + r ⎜1+ θ ln + θ ⎟dϕ<br />
⎝ 1−σ R⎠ ⎝ 1−σ R 1−σ<br />
⎠<br />
- the elasticity<br />
<strong>theory</strong><br />
The result <strong>of</strong> the elasticity <strong>theory</strong> is valid only for small<br />
deficit angles and near the boundary<br />
θ 1<br />
r ∼ R<br />
The result <strong>of</strong> the geometric model is valid for allθ<br />
and everywhere<br />
lnduced metric components def<strong>in</strong>e the deformation<br />
tensor and can be measured experimentally<br />
13
Conclusion<br />
<strong>Geometric</strong> <strong>theory</strong> <strong>of</strong> <strong>defects</strong><br />
? ? ? ? ?<br />
Elastic gauge<br />
Lorenz gauge<br />
Elasticity <strong>theory</strong><br />
Pr<strong>in</strong>cipal chiral SO(3)-model<br />
1) The geometric <strong>theory</strong> <strong>of</strong> <strong>defects</strong> <strong>in</strong> <strong>solids</strong> appears to be<br />
a fundamental <strong>theory</strong> <strong>of</strong> <strong>defects</strong>.<br />
2) It describes s<strong>in</strong>gle <strong>defects</strong> as well as cont<strong>in</strong>uous distribution<br />
<strong>of</strong> <strong>defects</strong>.<br />
3) It provides a unified treatment <strong>of</strong> <strong>defects</strong> <strong>in</strong> media (dislocations)<br />
and <strong>in</strong> sp<strong>in</strong> structures (discl<strong>in</strong>ations).<br />
4) In the absence <strong>of</strong> <strong>defects</strong> it reduces to the elasticity <strong>theory</strong><br />
for the displacement vector field and to the pr<strong>in</strong>cipal chiral<br />
SO(3)-model for sp<strong>in</strong> structures.<br />
14